基于指數加權的改進衰減記憶自適應濾波算法
2013-12-01 02:12:02黃長強井會鎖丁達理賴志平
探測與控制學報 2013年4期
蔡 佳,黃長強,井會鎖,丁達理,賴志平
(1.空軍工程大學航空航天工程學院,陜西 西安 710038;2.西安機電信息技術研究所,陜西 西安 710065;3.廣州軍區空軍裝備部,廣東 廣州 510071)
0 引言
預警機作為空中的指揮所,隨著其功能從單一探測到預警、指揮和控制的綜合發展,其作用顯得日益重要與突出,在未來體系對抗條件下的空戰中受到越來越多的重視。但是,預警機本身所攜帶武器的作戰性能并不像戰斗機等其他機種那樣強大,它在空域中的位置一般離我方的機載探測裝置距離很遠,這就造成了我方機載傳感器量測數據的不準確,相比其他機種對其探測精度并不高,故而對預警機進行目標跟蹤的精度就會受到影響。因此,針對預警機目標的特殊機動模式,如何對其進行有效跟蹤已成為目標跟蹤領域中的一個重點。
目標跟蹤是指是為了維持對目標當前狀態的估計,同時也是對傳感器接收到的量測進行處理的過程[1]。對于機動目標,由于其運動模型未知,并且可能隨時間變換,任何一個單一的數學模型都難以描述實際的運動狀態,所以在實際問題中常采用交互式多模型算法[2]。交互式多模型算法在運算中引入了多個運動模型,并且各個模型能夠并行計算,通過Markov轉移概率矩陣來實現模型切換,對每個模型的狀態估計按一定的概率加權來輸出最終的估計結果,因此在機動目標跟蹤問題中得到廣泛應用。
卡爾曼濾波算法發展至今很好地解決了交互式多模型目標跟蹤的目標狀態估計問題[3]。文獻[4]采用標準卡爾曼濾波算法進行目標的位置預測,但是它是基于系統模型確定已知的前提;如果系統模型與真實觀測值不匹配,那么標準卡爾曼濾波結果可能會發散,文獻[5]利用衰減記憶濾波與平方根濾波相結合來分別克服模型誤差和計算誤差帶來的發散;文獻[6]利用衰減記憶濾波和多假設跟蹤算法對多目標跟蹤問題進行研究。但是與其他算法相結合并沒有改變其衰減因子為一常值的事實,在探測距離較遠量測數據不準確時將會帶來跟蹤精度不足。本文針對此問題,提出了一種基于指數加權的改進衰減記憶自適應濾波算法,它的衰減因子為指數型系數,能夠自適應計算得到。
1 系統模型與算法描述
1.1 系統模型
目標的離散時間系統狀態方程為:
式中,Φk,k-1為離散化的狀態轉移陣,Γk-1為過程噪聲驅動陣,Wk為零均值、協方差Qk=diag()的高斯白噪聲,它與X0相互獨立,有EWk=Qkδkl,Qk為已知的非負定陣,δkl為克羅尼克δ函數。
系統測量方程為:

式中,Hk為測量陣,Vk為零均值、協方差Rk=diag()的高斯白噪聲,它與Wk和X0相互獨立,有EVk=Rkδkl,Rk為已知的正定陣。
1.2 交互式多模型算法
交互式多模型算法(Interacting Multiple Model,IMM)過程可歸納為以下步驟[7-8]:
步驟1:混合概率及輸入交互
式中,j=1,…,r,pij是模型i轉到模型j的轉移概率,為規一化常數,
步驟2:卡爾曼濾波
對 應 于 模 型Mj(k),以(k-1/k -1),Poj(k-1/k -1)及Z(k)作為輸入進行卡爾曼濾波。
步驟3:模型概率更新
其中:
式中,c為歸一化常數,Λj(k)為觀測Zk的似然函數,υj(k)=Zk-Hk,Sj(k)= Hk+Rk。
步驟4:輸出交互
1.3 傳統衰減記憶濾波算法
通常情況下,1.2節步驟2采用的方法是標準卡爾曼濾波(Standard Kalman Filtering,SKF),這是一種線性最小方差的估計方法,對目標進行狀態估計非常有效,因此在解決目標跟蹤問題中得到了廣泛應用。但是如果系統的數學模型與噪聲的統計模型不準確,不能反映真實的動態過程,使得模型與真實的觀測值不匹配,就可能引起濾波發散,這是標準卡爾曼濾波的缺陷。避免這種缺陷的一種途徑就是強調新近數據的作用,而逐漸遺忘陳舊數據。傳統的衰減記憶卡爾曼濾波(Fading Memory Kalman Filtering,FMKF)就是基于此來扼制濾波發散的一種濾波方法[9]。
根據文獻[9],可以得到傳統的衰減記憶濾波方程組如下:
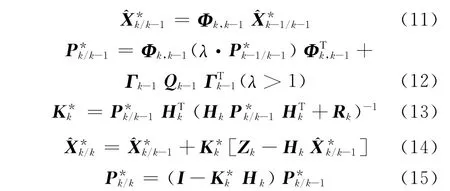
將式(11)和(14)合并,得到式(16):

觀察式(16)可見,相比標準卡爾曼濾波,由于引入衰減因子λ且λ>1,衰減記憶濾波使增益變大,因此新近測量值的權重加強;同時使的系數減小,即削弱了陳舊測量值對濾波的影響。
2 基于指數加權的衰減記憶自適應濾波算法
1.3 節描述的傳統衰減記憶濾波算法雖然對抑制濾波發散有作用,但是式(12)顯示其衰減因子λ為一常值,從統計觀點來看,傳統算法方程組中的每項系數均為λ,這其實反映了常值衰減記憶濾波算法是基于算術平均的,造成新近測量值對濾波精度的影響力有限。然而在實際應用中,當傳感器探測距離較遠量測數據不準確時,如果仍然采用上述濾波算法,則將不能滿足跟蹤精度的指標要求。
因此,為了更能體現新近數據對濾波的影響,本文設計了一個自適應計算的衰減因子λk對傳統算法進行改進,在形式上表現為將濾波方程的常值系數替換為一個指數型系數,那么公式中的每項乘以不同的加權系數,這樣就得到改進的FMKF算法(Improved FMKF,IFMKF),保證濾波器工作在最佳狀態。

觀察式(17)可見衰減因子λk滿足:1)λk>1,符合常值衰減因子大于1的基本要求;2)λk為指數型增函數,使得新近測量值權重逐漸增大,體現了自適應性的優點。獲得自適應衰減因子后,即可將其應用于IMM算法中進行目標跟蹤,具體實現分為兩步:
1)將自適應衰減因子λk代入式(11)—(15),得到改進后的濾波方程組。其中式(12)變形為(18),其余公式在形式上保持不變。

2)將改進后的濾波方程組應用于1.2節IMM算法的步驟2中,即用改進衰減記憶濾波代替標準卡爾曼濾波,提高對目標的跟蹤精度和跟蹤效果。
3 仿真分析
3.1 參數設置
預警機常用的機動模式有:跑道機動、圓形機動和∞機動等[10-11],如圖1(a)、(b)、(c)所示。
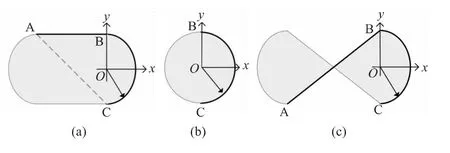
圖1 目標機動模式Fig.1 Maneuvering mode
為方便考慮問題,做出以下簡化:1)目標的運動模式均可視為直線運動與轉彎運動的組合;2)組合而得的機動模式軌跡具有幾何上的對稱性;3)預警機在某一空域的固定高度上運動。取狀態向量為X= [x,˙x,¨x,y,˙y,¨y]T,各分量分別表示目標的位置、速度和加速度。目標運動軌跡如圖1(a)所示,考慮到假設2),只研究目標在AB段直線運動,在BC段轉彎運動。
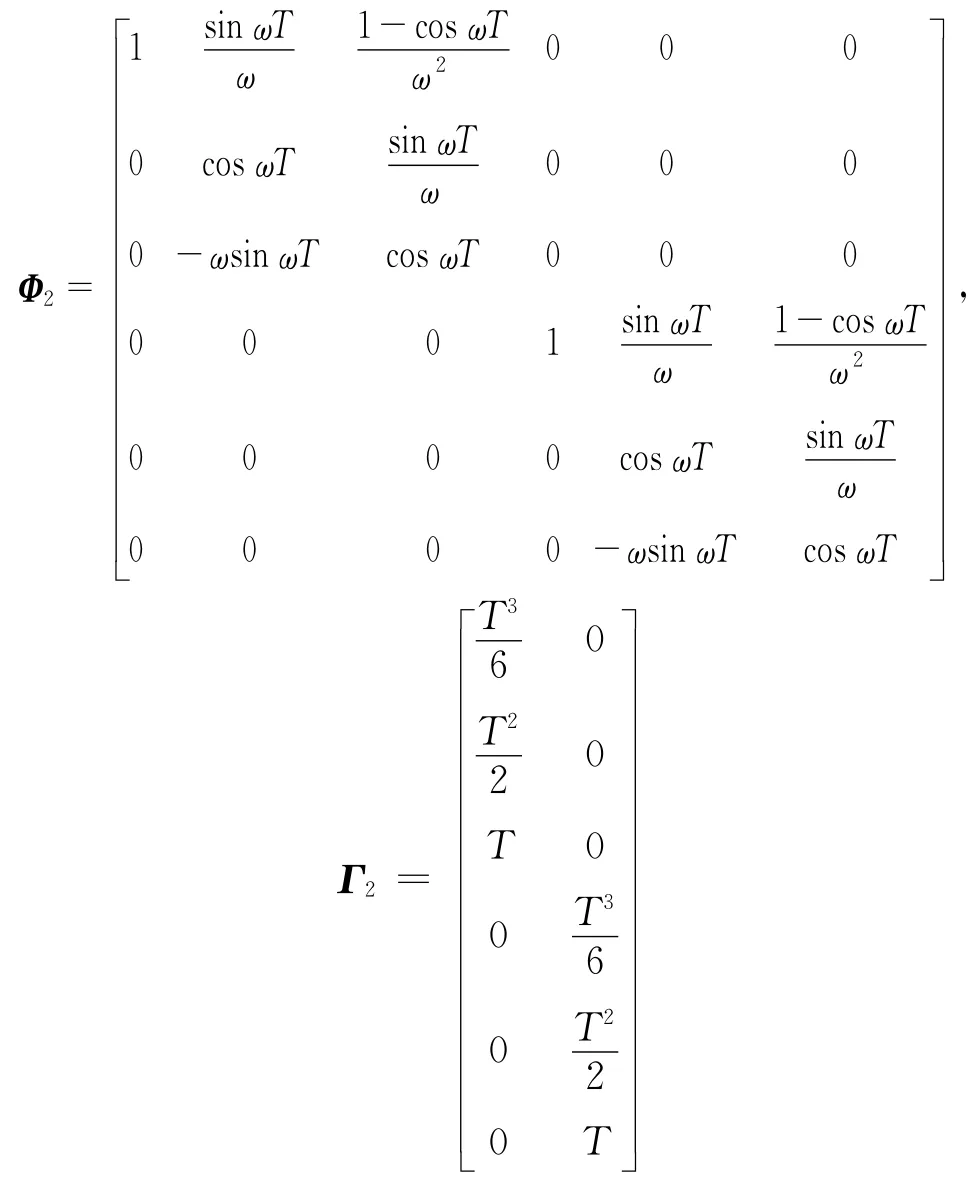
和任何基于模型的算法一樣,IMM算法只有在它所依賴的模型與目標實際的運動模型更加一致的情況下,它的性能才會更好。一般來說,當選擇兩到三個與目標可能運動情況相接近的模型進行跟蹤時,可以獲得很好的跟蹤結果[12-13]。基于此,考慮目標狀態模型由常加速模型M1和轉彎模型M2組合而成。
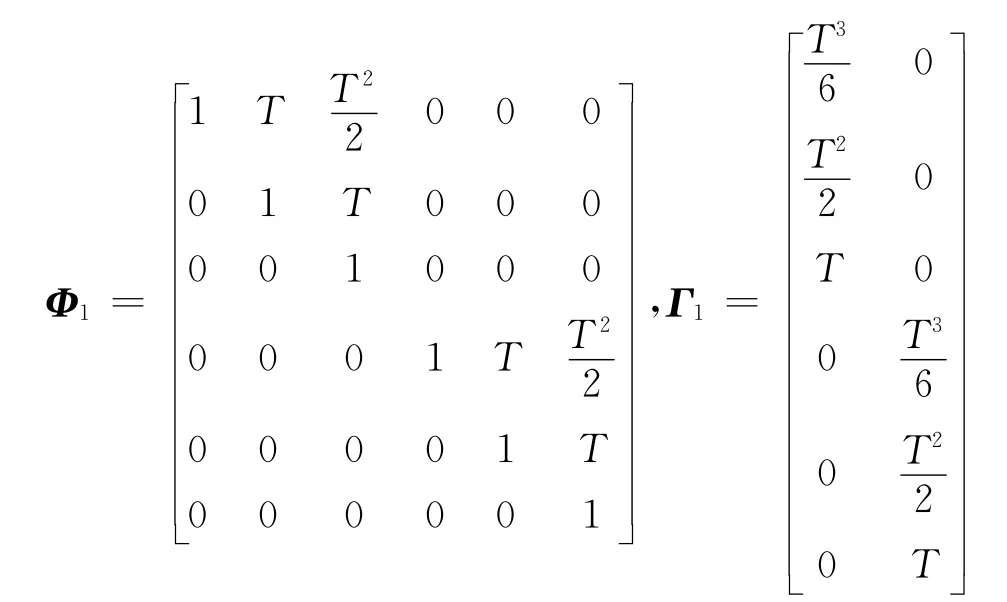
M1:常加速(Constant Acceleration,CA)模型M2:聯動式轉彎(Coordinated Turn,CT)模型CT運動的特點是目標的角速度ω和速度大小保持不變,而速度方向時刻在變化。
3.2 結果分析
在上述條件下,對預警機機動過程進行100次蒙特卡洛仿真實驗,觀察IFMKF算法的跟蹤效果,并就跟蹤誤差與SKF及FMKF進行了比較,結果如圖2—圖4所示。
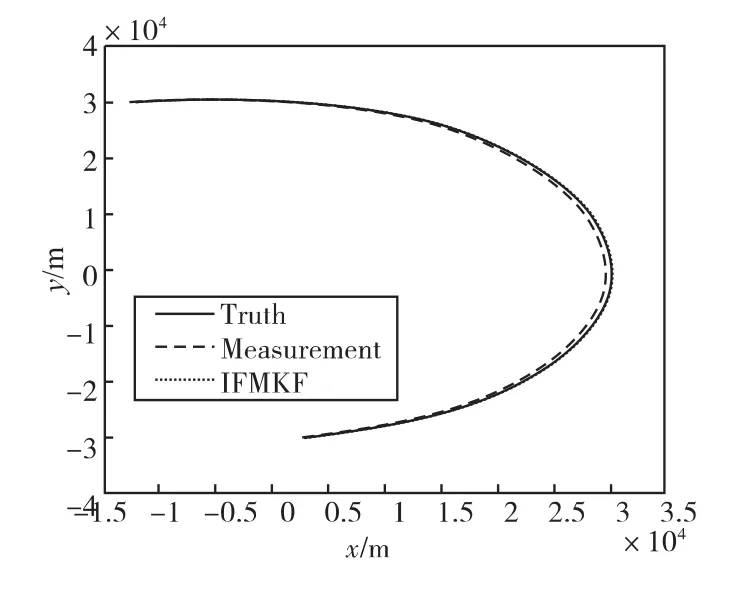
圖2 目標跟蹤效果Fig.2 Target tracking result
圖2所示為目標的真實軌跡和估計軌跡比較,可以看出兩條曲線非常吻合,說明采用本文提出的算法可實現對目標的有效跟蹤。
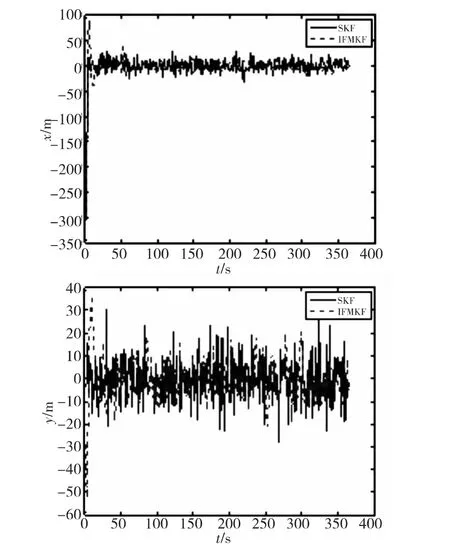
圖3 x和y方向均值誤差比較Fig.3 Mean error comparison of xand ydirection
圖3和圖4所示為IFMKF與FMKF及SKF算法在x和y方向的跟蹤誤差比較。仿真結果表明,IFMKF算法的估計誤差比FMKF和SKF都要小,跟蹤精度最高。跟蹤精度的具體對比見表1。
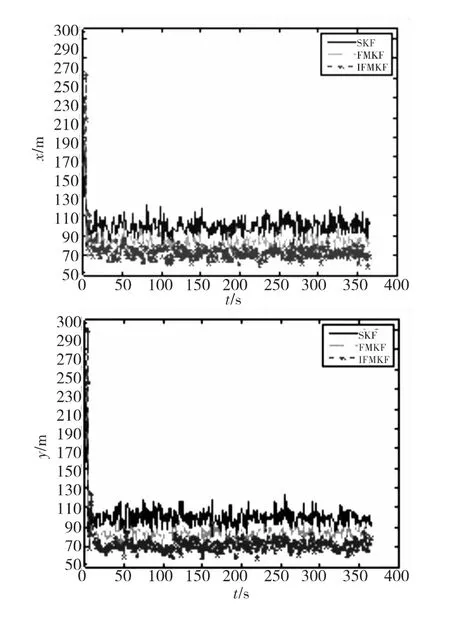
圖4 x和y方向均方根誤差比較Fig.4 RMS error comparison of xand ydirection
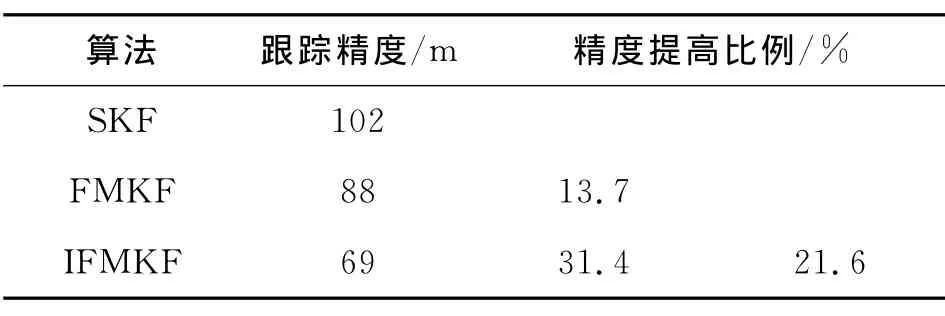
表1 跟蹤精度對比Tab.1 Tracking accuracy comparison
由于機載傳感器以及跟蹤場景的的不同,目標跟蹤精度的指標要求是不一樣的,對于機載主動傳感器而言,本文要求其跟蹤精度指標在100m以內。由表1可見:1)SKF算法的跟蹤精度最低,IFMKF最高;2)相比SKF算法,FMKF跟蹤精度提高了13.7%,IFMKF提高了31.4%,跟蹤效果更加顯著;3)相比常值衰減記憶濾波算法,本文改進的自適應算法在跟蹤精度方面提高了21.6%,不僅驗證了該算法的有效性,而且體現了其在更高跟蹤精度指標要求下的適用性。其中,自適應衰減因子λk的變化曲線如圖5所示。
由圖6可見,在目標做勻速直線運動時,M1的概率在這一時段較大,為主要濾波模型;當目標從勻速直線運動轉為轉彎運動時,主要濾波模型由M1切換至M2。目標當前所處的模型,直接表現為當前的模型概率占優勢;而模型之間的切換則應帶來模型概率的急劇變化。仿真結果中顯示的模型概率能夠有效地反映目標當前所處的模型,表明了本文提出的算法能夠自適應地選擇接近實際運動的模型。
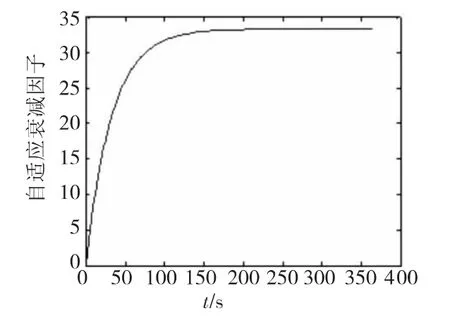
圖5 自適應衰減因子變化曲線Fig.5 Adaptive fading factor

圖6 模型更新概率曲線Fig.6 Model update probability
4 結論
本文提出了一種基于指數加權的改進衰減記憶自適應濾波算法。該算法中的衰減因子表現為指數型,濾波方程組中的每項乘以不同的加權系數,使得新近測量值的權重逐漸增大,體現了自適應性的優點,然后將改進后的數學方程組應用于交互式多模型算法當中對預警機進行目標跟蹤。仿真結果表明采用IFMKF算法的位置估計誤差較SKF和FMKF算法明顯減小,目標跟蹤精度最高,驗證了基于IFMKF的交互式多模型目標跟蹤算法是有效的。
[1]韓崇昭,朱洪艷,段戰勝.多源信息融合[M].北京:清華大學出版社,2002.
[2]Johnston L A,Krishnamurthy V.An improvement to the interacting multiple model algorithm [J].IEEE Transactions on Signal Processing,2001,49(12):2909-2923.
[3]Heemink A W,Segers A J.Modeling and prediction of environmental data in space and time using Kalman filtering[J].Stochastic Environmental Research and Risk Assessment,2002,16(3):225-240.
[4]陳林.一種基于卡爾曼濾波的運動目標跟蹤方法[J].艦船電子對抗,2011,34(3):67-70.CHEN Lin.A kind of motive targets tracking method based on Kalman filtering[J].Shipboard Electronic Countermeasure,2011,34(3):67-70.
[5]章飛,周杏鵬,陳小惠.基于衰減記憶濾波的平方根UKF被動目標跟蹤算法[J].測控技術,2010,29(4):22-26.ZHANG Fei, ZHOU Xingpeng, CHEN Xiaohui.Square-Root UKF passive target tracking algorithm based on memory attenuation filtering[J].Measurement &Control Technology,2010,29(4):22-26.
[6]劉士建,郭立,劉昌進,等.基于衰減記憶濾波的多假設跟蹤算法[J].信號處理,2004,20(4):346-349.LIU Shijian,GUO Li,LIU Changjin,et al.Multiple hypothesis tracking algorithm based on memory attenuated filter[J].Signal Processing,2004,20(4):346-349.
[7]XU M,SHAN X M,XU B G.Maneuvering target tracking using threshold interacting multiple model algorithm[J].Journal of Southeast University,2005,21(4):440-444.
[8]WANG X H,YANG X Y,QIN Z,et al.Hierarchical interacting multiple model algorithm based on improved current model[J].Journal of Systems Engineering and E-lectronics,2010,21(6):961-967.
[9]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,1998.
[10]蔡佳,羅繼勛,胡朝暉,等.預警機指揮控制系統在編隊飛機空戰中的算法研究[J].電光與控制,2010,17(6):28-31.CAI Jia,LUO Jixun,HU Zhaohui,etal.Air combat algorithm of aircraft formation under command and control of early warning aircraft[J].Electronics Optics &Control,2010,17(6):28-31.
[11]王國師,李強,代科學,等.基于防空警戒任務的多預警機協同補盲[J].系統工程與電子技術,2012,34(5):941-946.WANG Guoshi,LI Qiang,DAI Kexue,etal.Blind compensation for multi-AWACS cooperation based on aerial defence and warning[J].Systems Engineering and Electronics,2012,34(5):941-946.
[12]江寶安,萬群.基于UKF-IMM的雙紅外機動目標跟蹤算法[J].系統工程與電子技術,2008,30(8):1454-1459.JIANG Baoan,WAN Qun.Maneuvering target passive tracking with dual infrared observers using IMM algorithm based on UKF[J].Systems Engineering and Electronics,2008,30(8):1454-1459.
[13]朱安福,景占榮,高田,等.基于UKF的交互多模型算法[J].系統仿真學報,2009,21(3):655-657.ZHU Anfu,JING Zhanrong,GAO Tian,et al.Interacting multiple model algorithm based on UKF[J].Journal of System Simulation,2009,21(3):655-657.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17
光學精密工程(2016年6期)2016-11-07 09:07:19
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
海外文摘(2016年4期)2016-04-15 22:28:55
電源技術(2016年9期)2016-02-27 09:05:39
