新型浮式系泊系統靠泊動力響應分析
2013-12-06 12:10:36樂叢歡丁紅巖
天津大學學報(自然科學與工程技術版) 2013年1期
樂叢歡 ,丁紅巖 ,
(1. 天津大學水利工程仿真與安全國家重點實驗室,天津 300072;2. 天津大學建筑工程學院,天津 300072;3. 天津大學濱海土木工程結構與安全教育部重點實驗室,天津 300072)
在海洋油氣生產作業期間,由于平臺儲油能力有限,需要輸油穿梭船定期將原油運輸到港口.對于一些中小型儲油平臺和對生產作業有較高穩性的浮式生產系統,出于安全角度考慮,油船不能直接停靠其上,需要提供輔助的系泊系統用于油船的定位輸油作業.系泊系統主要分為固定式和浮動式兩種.固定式系泊系統由打入海底的樁柱支撐,整體穩定性好,適用于水深較淺的海域,隨著水深的增加,固定式系泊系統由于自重和建造成本的大幅增加而不再適用.浮動式系泊系統由水浮力支撐,可多次移位、重復使用,適用于深水海域,但其整體穩定性較差,對地基及環境條件要求較高.隨著海洋開發的不斷深入,呈現出多種新穎的系泊方式,并通過了理論和試驗的驗證.
本文研究的系泊系統是一種剛性與柔性相結合的新型浮式系泊系統,該浮式系泊系統具有建造成本低,施工簡單、施工周期短的優勢,適用于淺水開發.
1 新型浮式系泊系統
新型浮式系泊系統如圖1 所示.該新型浮式系泊系統由中間2 個獨立的浮式系(靠)泊平臺及兩側剛性系泊平臺構成.兩側的剛性平臺主要是為了增強系泊的約束性,提高其定位效果.位于中間的2 個浮式系(靠)泊平臺(見圖2)由上部結構、錨鏈和基礎構成,其中上部結構包括水下浮筒以及帶護舷的立柱,浮筒提供的恒定的凈浮力使錨鏈處于受拉狀態.如圖3 所示,當船舶靠泊時,上部結構在浮力、錨鏈拉力和船體靠泊力的共同作用下,產生一定的側移和下沉,并帶動周圍水體運動,新型浮式系泊系統通過浮式系(靠)平臺的變位吸收大量能量,優化了受力模式,因而船舶與平臺之間的相互作用力較小[1-2].
浮動式系泊系統主要包括張緊式和懸鏈線式兩種[3-5],目前多采用懸鏈線式.浮式系泊系統由于具有可浮動性,其受力復雜,關于浮式系泊的研究仍處于初步階段[6-8].新型浮式系泊系統涉及到船體及多浮體之間的耦合運動問題,系統的運動相對復雜.船體靠泊時與浮式平臺發生碰撞,兩者之間的撞擊力很難確定,并且由于浮體的運動速度是時變的,所以引起的慣性力、黏性力、附加質量也是時變的.若再加上波浪的作用,整體、系統地分析將非常復雜.本文設計了比例尺為1∶40 的多組模型試驗,對不同靠泊工況組合下浮式系泊系統的運動特性及動力響應進行定性定量的分析.
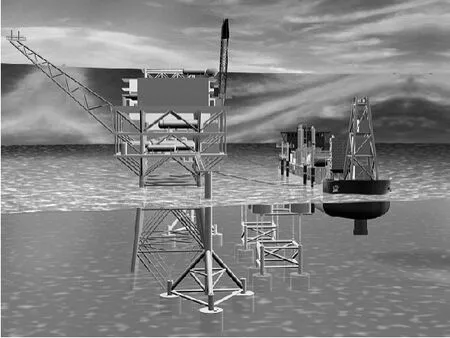
圖1 浮式系泊系統Fig.1 Floating mooring system
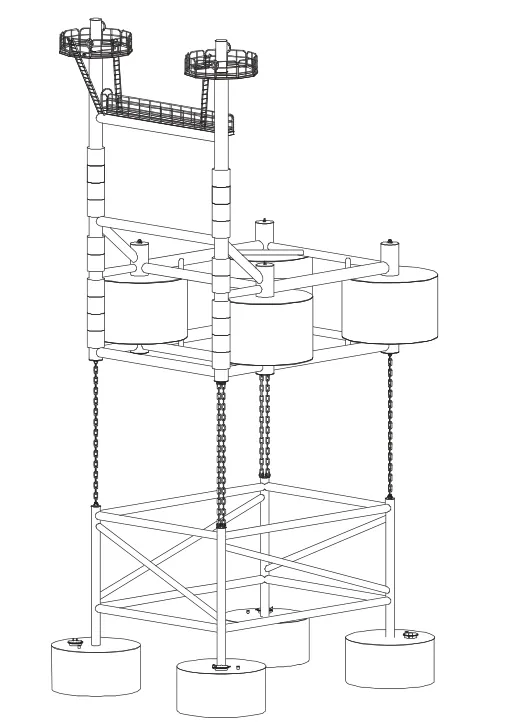
圖2 浮式系(靠)泊平臺Fig.2 Floating berthing and mooring platform
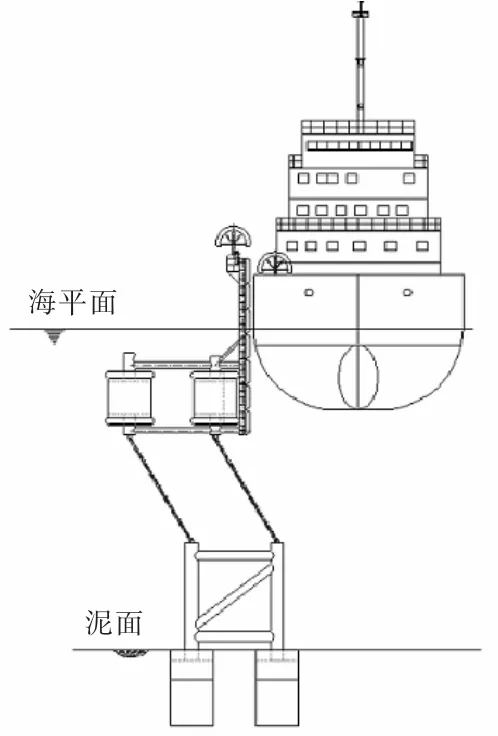
圖3 浮式系(靠)泊平臺變位吸能Fig.3 Floating berthing and mooring platform absorbing energy by changing positions
2 試驗設計
2.1 試驗模型
2.1.1 系(靠)泊平臺模型
試驗模型按重力和慣性力弗勞德相似定律1∶40 比例進行相似比尺設計[9-10],模型如圖4 所示,具體尺寸見表1.以下表示中均采用 “原型尺寸(模型尺寸)” 形式.

圖4 浮式系泊系統模型Fig.4 Model of floating mooring system
2.1.2 護舷模擬
護舷原型為型號為D400×400×1500 半圓型D型橡膠護舷.模型設置高度與原型護舷高度幾何相似,受力點與原型護舷中心的受力點位置相同.
2.1.3 錨鏈模型
錨鏈模型采用基本無彈性的尼龍線與多級彈簧鋼片的組合體模擬,通過改變彈簧鋼片的長度來模擬原型的拉力-伸長關系曲線相似,參數見表1.

表1 浮式系泊系統模型尺寸Tab.1 Main characteristic parameters of floating mooring system
2.1.4 船舶模型
試驗船舶為萬噸級穿梭油輪船,船型參數見表2.船舶模型采用木制船模,與原型保持幾何相似.采用鉛制砝碼壓載配重模擬船舶的壓載和滿載狀態,船舶模型通過儀器測試,滿足吃水、重量、重心位置、質量慣性矩和自振周期等與原型相似.

表2 試驗船型主要尺寸參數Tab.2 Main characteristics of vessel
2.2 試驗儀器設備
試驗水池:長40,m,寬11,m,深1,m.試驗水池設有造波機和消波裝置.
測量設備:電容式波高儀、加速度傳感器、位移傳感器、力傳感器、攝像系統、波浪率定系統、水溫計以及相應的信號放大器和信息采集系統.
2.3 儀器布置
如圖5 所示,船艏系(靠)泊平臺(平臺A)和船艉系(靠)泊平臺(平臺B)的靠船柱頂端各布置1 個3自由度的加速度傳感器,用于測量在船舶撞擊作用下系(靠)泊平臺的橫蕩、縱蕩、垂蕩3 個運動方向上的加速度.同時在2 個平臺上分別布置位移傳感器,測量平臺位移變化.在每個錨鏈與筒形基礎的連接處安裝1 個拉力傳感器,測量錨鏈張力.
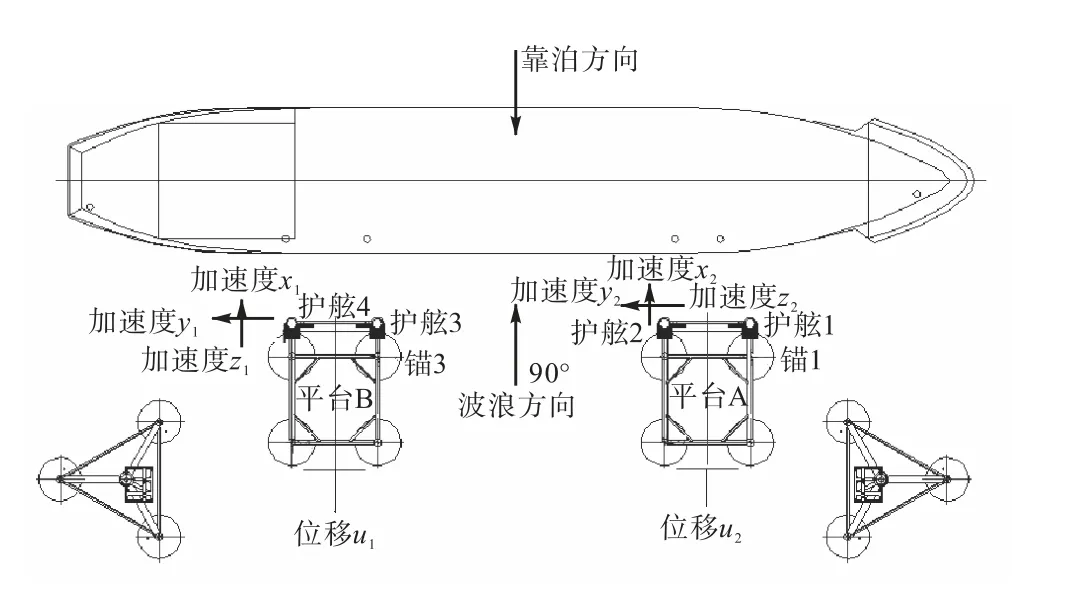
圖5 傳感器布置Fig.5 Arrangement of instrumentation
2.4 測試組合方案
在凈浮力(300,t/4.69,kg)及水深(25,m/0.625,m)一定的情況下,進行包括無波浪情況下及波浪(波向角90o)作用下靠泊試驗,主要考慮船速、排水量和波浪等參數的影響,試驗組合見表3;表4 為無波浪剛性系(靠)泊(平臺A 和平臺B 固定)試驗組合,用于對比浮式靠泊效果.

表3 浮式靠泊試驗組合Tab.3 Test combinations of floating berthing

表4 剛性靠泊試驗組合Tab.4 Test combinations for rigid berthing
3 試驗結果與分析
試驗中得到了大量的數據,通過快速傅里葉變換對原始數據進行濾波分析.由于篇幅限制,文中只給出部分試驗結果.
3.1 無波浪情況下靠泊分析
圖6和圖7 分別為無波浪試驗組合下,平臺A和平臺B 位移時程曲線.對比圖6 和圖7 平臺位移時程曲線可以發現船艏首先靠泊,船艉稍后靠泊,這主要是由于船舶在沒有動力驅使下,由于偏心的存在(船舶重心偏向于船艉),無法實現平靠.由于船艏首先靠泊,船舶靠泊能量大部分在船艏靠泊時被平臺A和周圍水體吸收,平臺A 的位移都遠大于平臺B;尤其當船速和排水量較小時,初始靠泊能量較小,平臺A 和平臺B 位移差距更明顯.從圖7 可以進一步發現,船舶壓載情況下,以0.4,kn 的速度低速靠泊時,由于初始靠泊能量較小,船艉并未與平臺B 發生碰撞,這與試驗觀測結果一致.隨著船速和排水量的加大,船艏和船艉靠泊的時間間隔越小,平臺A 和平臺B位移的差距也越小,平臺B吸能比例逐漸增大.
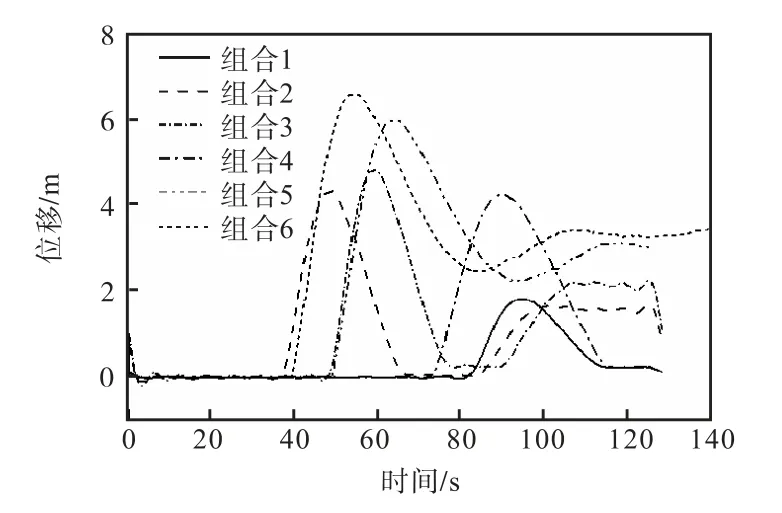
圖6 平臺A位移時程曲線Fig.6 Displacement-time curves of platform A
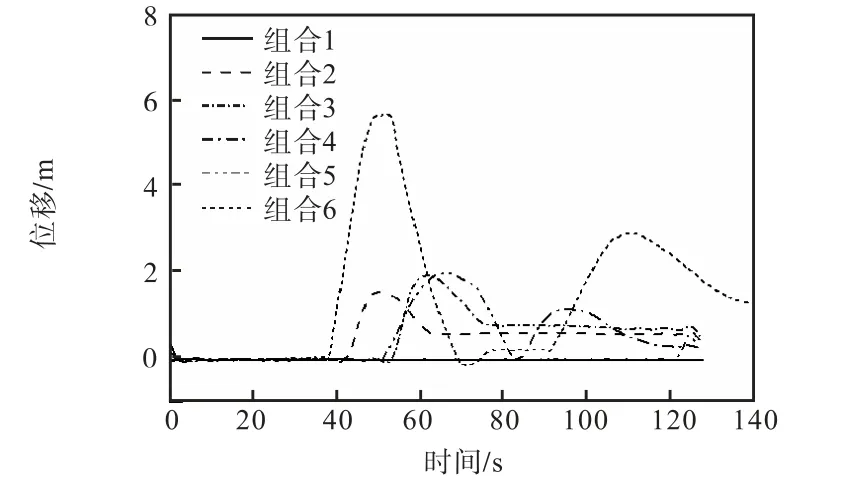
圖7 平臺B位移時程曲線Fig.7 Displacement-time curves of platform B
圖8和圖9 分別為無波浪試驗組合下,平臺A和平臺B 最大位移曲線.從圖8 和圖9 可知船速和排水量對于平臺位移影響很大,壓載靠泊時,船速從0.4,kn 增至1.0,kn,系(靠)泊平臺的平均位移(平臺A和平臺B 位移平均值)由0.92,m 增至3.40,m,增幅達269.3%,其中平臺A 最大位移達到4.85,m.與壓載相比,滿載靠泊將引起平臺A 和平臺B 的更大范圍的運動.滿載靠泊時,船速從0.4,kn 增至1.0,kn,系(靠)泊平臺的平均位移由2.73,m 增至6.19,m,增幅達126.5%,其中平臺A 最大位移達到6.63,m.
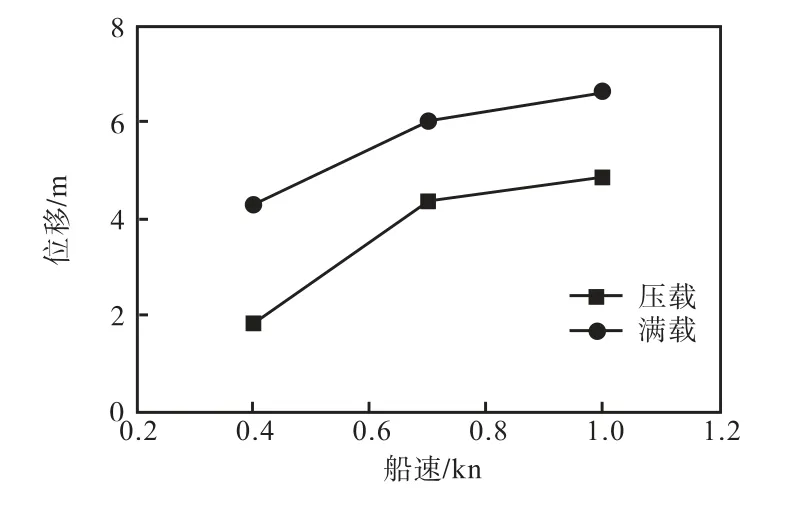
圖8 平臺A的最大位移Fig.8 Maximum displacement of platform A
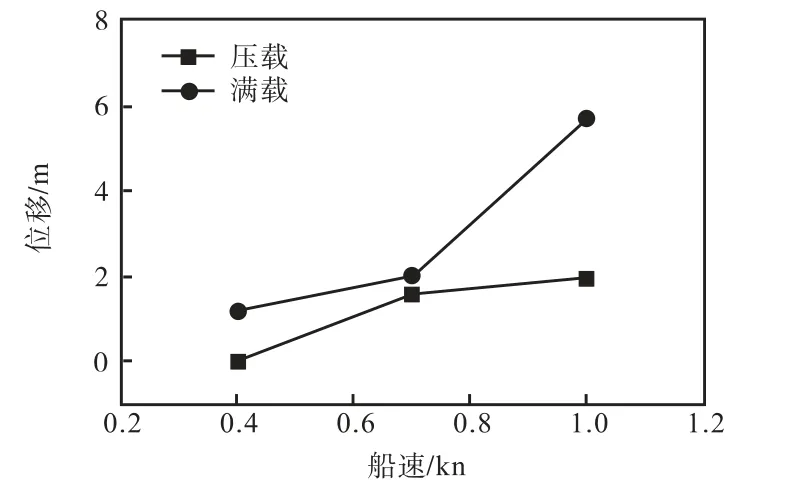
圖9 平臺B的最大位移Fig.9 Maximum displacement of platform B
圖10和圖11 分別為無波浪試驗組合下,護舷1(位于平臺A)、護舷4(位于平臺B)撞擊力時程曲線.從圖10 和圖11 可以發現,撞擊力的試驗結果與平臺位移結果吻合,與船艏發生碰撞的護舷1 撞擊力遠大于與船艉發生碰撞的護舷4.船速和排水量對于護舷撞擊力的影響很大,滿載情況下船速從0.4,kn 增加到1.0,kn,護舷1 的最大撞擊力從166.5,kN 增長到232.7,kN,漲幅達39.8%;護舷4 的最大撞擊力從52.7,kN 增長到98.9,kN,漲幅達87.7%.排水量從5,000,t 增加到12,000,t,1.0,kn 船速下,護舷1 的撞擊力從177.6,kN 增長到232.7,kN,漲幅達31.0%;護舷4 的最大撞擊力從49.0,kN 增長到98.9,kN,漲幅達101.8%.從撞擊力的角度也可知,船艉系(靠)泊平臺B 吸能比例隨船速和排水量的增大而逐漸增大.由于船艏首先靠泊,所以船舶第1 次靠泊時間可以認為是船舶與護舷1 的撞擊時間.從護舷1 的撞擊力時程曲線計算出的撞擊時間可知,靠泊時間主要由船速決定:船速越大,撞擊時間越短;其中船速為1.0,kn 時,組合3 和組合6 的撞擊時間大約為16.2,s;當船速為0.4,kn 時,組合1 和組合4 的撞擊時間約為30.5,s.
表5 給出了浮式系(靠)泊平臺與剛性系(靠)泊平臺護舷處最大撞擊力結果.與剛性靠泊相比,浮式靠泊可以有效減小靠泊時的最大撞擊力,其中平臺A護舷撞擊合力降低比例達到45%以上,平臺B 護舷撞擊合力降低比例達到80%以上.結果顯示當其他條件一定時,船速越大,撞擊力降低比例越大.從護舷最大撞擊力來看,滿載情況下船速在1.0,kn 以內,剛性靠泊時可能出現的最大護舷撞擊力達到2,458.2,kN,而浮式靠泊時可能出現的最大護舷撞擊力為578.7,kN,僅為剛性靠泊護舷撞擊力的30.13%.
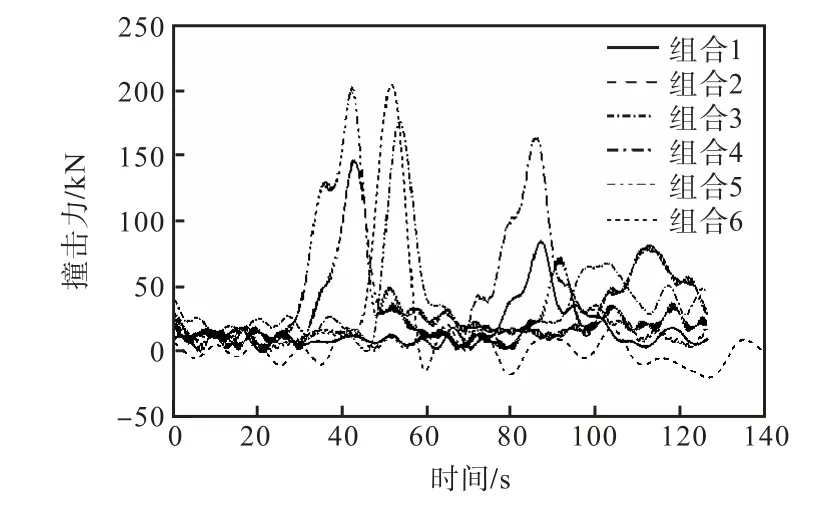
圖10 護舷1撞擊力時程曲線Fig.10 Impact force-time curves of fender 1
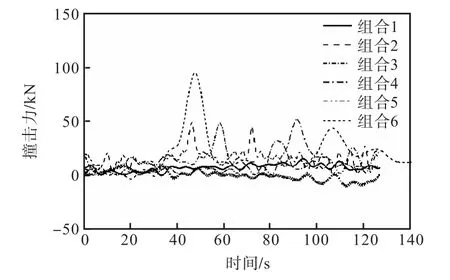
圖11 護舷4撞擊力時程曲線Fig.11 Impact force-time curves of fender 4

表5 浮式靠泊與剛性靠泊最大撞擊力對比Tab.5 Comparisons of the maximum impact force between floating berthing and rigid berthing
3.2 波浪下靠泊分析
波浪的要素很多,包括波高、周期、波向等,波浪影響系泊系統的響應很復雜,限于篇幅本文只初步對渤海典型海況波浪下靠泊(波高2,m,周期6,s)與無波浪靠泊進行對比,今后將會對波浪因素進行專門的論述.圖12 和圖13 分別為規則波試驗組合下,平臺A 和平臺B 位移時程曲線.對比圖12 和圖13 可以發現在逆浪的作用下,仍然是船艏首先靠泊.船艉后靠泊.與無波浪工況不同的是,滿載情況下,當船速為0.4,kn時,船艉無法與平臺B 發生碰撞.這主要是由于波浪作用方向與船舶靠泊方向相反,波浪阻力消耗了一部分初始靠泊能量.船舶靠上平臺后,受到護舷提供的撞擊反力和波浪力的作用下,隨后與平臺發生分離,平臺在錨鏈的拉力作用下,逐漸恢復到平衡位置,隨后在波浪力的作用下,船舶與系(靠)泊平臺將發生二次碰撞,此時平臺位移和撞擊力都比第1 次要小.
表6 給出了無波浪及波浪(規則波(H=2,m,T=6,s),隨機波(Hs=2,m,Tp=6,s))工況下浮式靠泊時各參數極值情況.從表6 可知,與無波浪作用規律相似,在規則波和隨機波作用下,當其他要素一定時,船速越大,系(靠)泊平臺位移越大,這意味著更多的撞擊能量通過系(靠)泊平臺的變位方式被吸收.與無波浪工況對比發現,在波浪作用下,平臺的各向加速度均得到不同程度的放大,隨機波作用下系(靠)泊平臺的靠泊動力響應明顯大于相同波高和周期的規則波作用下的動力響應.當船速較小時,由于波浪力方向與靠泊方向相反,波浪力的作用使得平臺A 和平臺B 位移小于同條件下無波浪靠泊狀態.隨著船速的增大,波浪引起的水的阻尼對船艉的速度影響有減弱的趨勢,這和無波浪靠泊時的趨勢是一致的.當船速為1.0,kn 時,無波浪下船艏系(靠)泊平臺位移為6.625,0m,相同條件下的規則波下船艏系(靠)泊平臺的位移為7.084,8,m,隨機波下船艏系(靠)泊平臺的位移達到了7.793,3,m;可見,波浪作用下船舶滿載靠泊時,由于波浪力的作用,系(靠)泊平臺可能發生更大的位移,以吸收波浪作用到船舶上產生的能量,而隨機波作用下船舶將引起更大的平臺位移;同時在波浪作用下滿載靠泊時,船速不宜大于1.0,kn.

圖12 規則波作用下船艏系(靠)泊平臺位移時程曲線Fig.12 Displacement-time curves of bow berthing and mooring platform in the regular wave
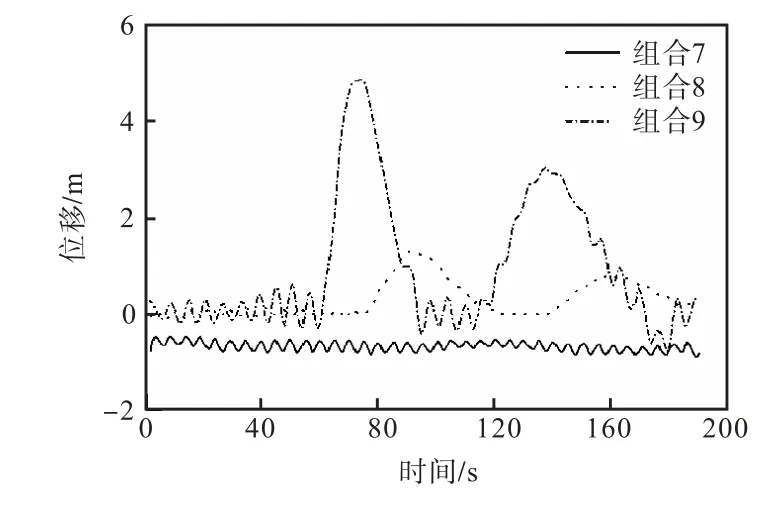
圖13 規則波作用下船艉系(靠)泊平臺位移時程曲線Fig.13 Displacement-time curves of stern berthing and mooring platform in the regular wave

表6 無波浪及波浪(規則波、隨機波)工況下靠泊動力響應(滿載)Tab.6 Berthing dynamic response in the no wave,regular wave and irregular wave(full load) conditions
4 結 論
(1) 相對于剛性靠泊,浮式靠泊的靠泊力小,吸能大.浮式系泊系統具備了傳統剛性系泊系統所不具備的吸能緩沖作用,靠泊安全性提高.
(2) 船速是影響靠泊動力響應的主要因素之一.船速越大,撞擊時間越短,護舷處撞擊力越大,同時平臺的位移越大;對于本系泊系統,船舶滿載的情況下,船速不宜大于1.0,kn,當船速大于1.0,kn,護舷最大撞擊力將超過護舷設計反力,同時浮式平臺位移過大,靠泊安全性能得不到保障.
(3) 船舶排水量對于該浮式系泊系統的靠泊動力響應影響較大.排水量越大,護舷處撞擊力越大,同時浮式系(靠)泊平臺的位移越大.
(4) 由于船體結構重心偏向船艉,船艏首先靠泊,靠泊能量大部分被船艏系(靠)泊平臺所吸收,船艏系(靠)泊平臺的位移和護舷撞擊力都遠遠大于船艉系(靠)泊平臺.尤其當撞擊能量較小時,這種差異越明顯.隨著船速和船舶排水量的加大,船艏和船艉靠泊的時間間隔越小,船艏系(靠)泊平臺和船艉系(靠)泊平臺上護舷撞擊合力及位移的差距也越小.所以當初始靠泊能量較小時,船艉系(靠)泊平臺的吸能比例小.隨著初始靠泊能量增大,船艉系(靠)泊平臺吸能比例逐漸增大.
(5) 與無波浪工況對比發現,在波浪作用下,平臺的各向加速度均得到不同程度的放大.隨機波作用下系(靠)平臺的靠泊動力響應明顯大于相同波高和周期的規則波作用下的動力響應.
[1]蔣致禹,顧敏童,謝仲安,等. 基于非線性數值模擬的工程船靠泊響應研究[J]. 振動與沖擊,2010,29(9):181-184.Jiang Zhiyu,Gu Mintong,Xie Zhongan,et al. Responses of engineering ships during berthing based on nonlinear numerical simulations[J]. Journal of Vibration and Shock,2010,29(9):181-184(in Chinese).
[2]Jiang Zhiyu,Xie Zhongan,Gu Mintong. Analysis of mechanics during berthing of engineering ships[J].Journal of Ship Mechanics , 2010 , 14(12): 1394-1404.
[3]童 波,楊建民,李 欣. 深水半潛式平臺系泊系統動力特性研究[J]. 海洋工程,2009,27(1):1-7.Tong Bo,Yang Jianmin,Li Xin. Comparison and analysis of dynamic effect for mooring system of semisubmerged platform in deep water[J]. The Ocean Engineering,2009,27(1):1-7(in Chinese).
[4]唐友剛,張素俠,張若瑜,等. 深海系泊系統動力特性研究進展[J]. 海洋工程,2008,26(1):120-126.Tang Yougang,Zhang Suxia,Zhang Ruoyu,et al.Advance of study on dynamic characters of mooring systems in deep water[J]. The Ocean Engineering,2008,26(1):120-126(in Chinese).
[5]王建超,貢金鑫. 柔性系靠泊結構系纜力計算[J]. 水利水運工程學報,2010(2):107-113.Wang Jianchao,Gong Jinxin. Mooring force calculation of flexible berthed structures[J]. Hydro-Science and Engineering,2010(2):107-113(in Chinese).
[6]Johanning L,Smith G H,Wolffram J. Measurements of static and dynamic mooring line damping and their importance for floating WEC devices[J]. Ocean Engineering,2007,34(14/15):1918-1934.
[7]Agarwal A K,Jain A K. Dynamic behavior of offshore spar platforms under regular sea waves[J]. Ocean Engineering,2003,30(4):487-516.
[8]Ji Chunyan,Yuan Zhiming,Chen Minglu. Study on a new mooring system integrating catenary with taut mooring[J]. China Ocean Engineering,2011,25(3):427-440.
[9]丁紅巖,王高峰,劉建輝. 多筒基礎平臺自浮拖航系拖點位置試驗分析[J]. 天津大學學報, 2007 ,40(5):548-553.Ding Hongyan,Wang Gaofeng,Liu Jianhui. Analysis of towing points in towing multi-bucket foundation platform[J]. Journal of Tianjin University,2007,40(5):548-553(in Chinese).
[10]中華人民共和國交通部. JTJ/T 234—2001 波浪模型試驗規程[S]. 北京:人民交通出版社,2002.Ministry of Communications of the People's Republic of China. JTJ/T 234—2001 Wave Model Test Regulation[S].Beijing:China Communications Press,2002(in Chinese).
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
艦船科學技術(2021年7期)2021-08-11 15:30:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中國港灣建設(2018年5期)2018-05-19 07:35:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國水運(2014年6期)2014-08-11 09:55:22