先進(jìn)控制算法在熱工控制中的關(guān)鍵問(wèn)題研究
2013-12-20 06:19:24郝勇生
發(fā)電設(shè)備 2013年2期
郝勇生,于 沖,吳 波
(南京南瑞繼保電氣有限公司,南京211102)
目前,國(guó)內(nèi)大型火電機(jī)組的自動(dòng)控制系統(tǒng)均采用集散控制系統(tǒng)(DCS)來(lái)實(shí)現(xiàn),不論是國(guó)內(nèi)自主生產(chǎn),還是從國(guó)外引進(jìn)的控制系統(tǒng),仍以常規(guī)的控制策略為主,如PID控制、前饋控制等。然而熱工過(guò)程被控對(duì)象往往具有大滯后、時(shí)變、非線性等特點(diǎn),采用常規(guī)的控制策略難以取得理想的控制效果。許多關(guān)鍵的控制系統(tǒng),如機(jī)爐協(xié)調(diào)控制系統(tǒng)、再熱汽溫控制系統(tǒng),均未能取得良好的控制品質(zhì)。因此研究適用于熱工過(guò)程的先進(jìn)控制(APC)算法,進(jìn)一步完善和優(yōu)化現(xiàn)有的控制系統(tǒng),對(duì)火電機(jī)組的安全、經(jīng)濟(jì)運(yùn)行具有重要的意義,這也是今后熱工自動(dòng)化領(lǐng)域研究的熱點(diǎn)。
針對(duì)熱工過(guò)程被控對(duì)象的特點(diǎn),目前已有多種APC算法被提出,如狀態(tài)變量控制算法[1]、相位補(bǔ)償算法[2]、自適應(yīng)控制算法[3]、預(yù)測(cè)控制算法[4]等。這些控制算法為系統(tǒng)控制品質(zhì)的提升提供了有力的理論依據(jù)。然而由于算法的復(fù)雜性,目前這些APC算法還難以用組態(tài)的形式在DCS內(nèi)部實(shí)現(xiàn),需要借助相應(yīng)的系統(tǒng)開(kāi)發(fā)平臺(tái)來(lái)完成算法的功能。在具體實(shí)現(xiàn)的過(guò)程中,有關(guān)系統(tǒng)平臺(tái)的選擇、主控算法的開(kāi)發(fā)、系統(tǒng)之間跟蹤切換邏輯等方面還有很多問(wèn)題需要研究。本文以預(yù)測(cè)控制為例,針對(duì)其中的關(guān)鍵問(wèn)題進(jìn)行介紹和分析,并探討相應(yīng)的解決方案。
1 系統(tǒng)平臺(tái)選擇
APC算法與傳統(tǒng)PID控制算法相比,主要的特點(diǎn)和不同之處在于:APC算法是一種基于對(duì)象模型的控制算法,包含了模型辨識(shí)、輸出預(yù)測(cè)等過(guò)程。另外,APC算法通常還要處理復(fù)雜的優(yōu)化計(jì)算問(wèn)題,如滾動(dòng)優(yōu)化、變量約束處理、非線性問(wèn)題處理等,因此實(shí)現(xiàn)的難度必然增大[5]。在DCS系統(tǒng)中,除非廠家專門(mén)開(kāi)發(fā),APC算法還難以用現(xiàn)有的函數(shù)模塊庫(kù)組態(tài)實(shí)現(xiàn)。從成功的應(yīng)用范例來(lái)看,采用帶有通用接口的獨(dú)立系統(tǒng)開(kāi)發(fā)平臺(tái)是解決這一問(wèn)題的有效途徑。目前常用的系統(tǒng)平臺(tái)有兩類:一類是基于外接控制器模式的優(yōu)化系統(tǒng),如西門(mén)子公司的PROFI系統(tǒng)[6],國(guó)產(chǎn) 的INFIT 系 統(tǒng)[7],這 類 系 統(tǒng) 在 硬 件上以可編程控制器(PLC)為代表,將APC控制系統(tǒng)作為一個(gè)擴(kuò)展的控制器接入DCS中,其特點(diǎn)是系統(tǒng)實(shí)時(shí)性和可靠性好;另一類是基于上位機(jī)優(yōu)化模式的系統(tǒng),如Foxboro公司的Connoisseur系統(tǒng)[8],Honeywell公司的 Profit RMPCT系統(tǒng)[9],這類系統(tǒng)在硬件上采用工控機(jī)或服務(wù)器,以上位機(jī)的形式將APC系統(tǒng)的優(yōu)化控制指令發(fā)送至DCS控制器。與前一類系統(tǒng)相比,該系統(tǒng)的優(yōu)點(diǎn)是結(jié)構(gòu)靈活、維護(hù)簡(jiǎn)單、設(shè)備通用性好;缺點(diǎn)是上位機(jī)與DCS之間的通信環(huán)節(jié)較為復(fù)雜。在具體工程應(yīng)用時(shí),無(wú)論選擇哪種模式,以下問(wèn)題都應(yīng)當(dāng)考慮:(1)系統(tǒng)平臺(tái)的穩(wěn)定性,即系統(tǒng)的軟、硬件能夠安全穩(wěn)定地運(yùn)行,可靠性要求與DCS接近或相當(dāng);(2)軟件開(kāi)發(fā)支撐能力,即系統(tǒng)平臺(tái)本身應(yīng)提供較強(qiáng)的開(kāi)發(fā)環(huán)境去實(shí)現(xiàn)APC算法;(3)接口的通用性,即系統(tǒng)需要提供通用的接口通信方式,從而實(shí)現(xiàn)與現(xiàn)有絕大部分DCS系統(tǒng)的連接。滿足以上三點(diǎn)要求,是APC系統(tǒng)能夠成功實(shí)施的必要條件。
2 APC系統(tǒng)在開(kāi)發(fā)時(shí)應(yīng)注意的問(wèn)題
2.1 對(duì)象模型的建立
APC算法是基于對(duì)象模型的控制算法,廣義預(yù)測(cè)控制(GPC)算法就是最典型的代表。對(duì)于大滯后的被控過(guò)程,預(yù)測(cè)控制是一種非常有效的控制方法,因?yàn)轭A(yù)測(cè)控制不僅是根據(jù)被調(diào)量的當(dāng)時(shí)值進(jìn)行控制的,而且根據(jù)被調(diào)量在未來(lái)一段時(shí)間內(nèi)的預(yù)測(cè)值進(jìn)行控制。因此控制作用可以提前一段時(shí)間動(dòng)作,這對(duì)大滯后被控過(guò)程的控制是至關(guān)重要的。預(yù)測(cè)控制有三個(gè)基本特征:預(yù)測(cè)模型、反饋校正和滾動(dòng)優(yōu)化,其算法結(jié)構(gòu)見(jiàn)圖1。
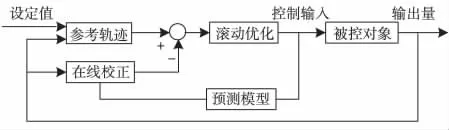
圖1 預(yù)測(cè)控制算法結(jié)構(gòu)
為了對(duì)機(jī)組特性有清晰了解,滿足算法開(kāi)發(fā)、調(diào)試的要求,需要對(duì)機(jī)組的動(dòng)態(tài)特性進(jìn)行試驗(yàn),以獲取對(duì)象的模型。由于熱工過(guò)程被控對(duì)象通常具有多變量耦合、大滯后、非線性等特點(diǎn),在進(jìn)行對(duì)象特性試驗(yàn)時(shí),應(yīng)充分考慮到上述因素的影響。首先要對(duì)被控對(duì)象的結(jié)構(gòu)進(jìn)行分析,確定對(duì)象的控制變量、被控變量和主要的擾動(dòng)量。考慮到對(duì)象的非線性,特性試驗(yàn)應(yīng)在不同的負(fù)荷下分別進(jìn)行,并且應(yīng)注意到對(duì)象上行特性和下行特性的不同,在進(jìn)行階躍響應(yīng)試驗(yàn)時(shí),應(yīng)先使控制變量階躍增大,待被控變量穩(wěn)定后,再使控制變量階躍減小,以全面反映對(duì)象的特性。而在對(duì)象模型辨識(shí)時(shí),模型階次不宜過(guò)高,以避免復(fù)雜的計(jì)算。試驗(yàn)表明:預(yù)測(cè)控制對(duì)建模誤差具有一定的適應(yīng)性,可選擇一個(gè)低階控制器去控制高階對(duì)象[10]。
2.2 主控算法的開(kāi)發(fā)
針對(duì)上述預(yù)測(cè)控制算法的結(jié)構(gòu)和特點(diǎn),在開(kāi)發(fā)預(yù)測(cè)控制主控程序時(shí),需要注意以下問(wèn)題。
2.2.1 算法的計(jì)算量和實(shí)時(shí)性問(wèn)題
預(yù)測(cè)算法復(fù)雜,計(jì)算量大,需要在每個(gè)采樣周期內(nèi)計(jì)算模型預(yù)測(cè)輸出、利用反饋進(jìn)行輸出預(yù)測(cè)校正、根據(jù)性能指標(biāo)在線滾動(dòng)優(yōu)化求解等。這么大的計(jì)算量對(duì)算法的實(shí)時(shí)性是不利的。因此,如何對(duì)預(yù)測(cè)控制算法進(jìn)行簡(jiǎn)化,減少實(shí)時(shí)計(jì)算量是拓展其應(yīng)用范圍并走上工程化的重要環(huán)節(jié)。文獻(xiàn)[11]指出了對(duì)預(yù)測(cè)控制進(jìn)行簡(jiǎn)化的途徑,包括簡(jiǎn)化或者避開(kāi)Diophantine方程的求解,采用快速算法對(duì)矩陣求逆,針對(duì)算法中的目標(biāo)函數(shù)和約束條件,采用分層優(yōu)化、次優(yōu)化或者最近邊界值代替,以及推導(dǎo)特定形式的預(yù)測(cè)控制算法結(jié)構(gòu)等。
2.2.2 被控對(duì)象非線性問(wèn)題的處理
很多熱工過(guò)程被控對(duì)象都有非線性的特點(diǎn),在不同的負(fù)荷下,對(duì)象所表現(xiàn)出來(lái)的動(dòng)態(tài)特性也不同。基于單個(gè)線性模型的預(yù)測(cè)控制很難達(dá)到全工況最優(yōu)控制的要求,應(yīng)采用基于對(duì)象整體非線性模型的全局非線性優(yōu)化控制算法。為了實(shí)現(xiàn)對(duì)非線性對(duì)象的特性描述和優(yōu)化控制,常用的方法有以下幾類[12]:(1)基于機(jī)理模型的非線性預(yù)測(cè)控制,此類方法要求對(duì)被控對(duì)象有深入了解,機(jī)理模型建立的難度高,計(jì)算量大,難以用于實(shí)時(shí)控制;(2)基于實(shí)驗(yàn)?zāi)P偷姆蔷€性預(yù)測(cè)控制,如 Wiener模型、Hammerstein模型,這類方法的優(yōu)點(diǎn)是精度較高,但對(duì)于非線性參數(shù)的子集模型辨識(shí)有一定困難;(3)基于智能模型的非線性預(yù)測(cè)控制,如神經(jīng)網(wǎng)絡(luò)模型,這類方法能夠有效地處理系統(tǒng)變量約束和強(qiáng)非線性,但在模型訓(xùn)練的收斂問(wèn)題、算法的實(shí)時(shí)性和穩(wěn)定性方面尚存在不少問(wèn)題[13];(4)基于線性化方法的預(yù)測(cè)控制,如多模型方法。這類方法在不同的工況附近用不同的局部線性模型描述非線性對(duì)象,在整個(gè)工作范圍內(nèi)利用多個(gè)線性模型的協(xié)調(diào)處理來(lái)逼近非線性過(guò)程,實(shí)現(xiàn)系統(tǒng)大范圍的優(yōu)化控制。它把全局非線性優(yōu)化問(wèn)題轉(zhuǎn)化成為每個(gè)運(yùn)算周期內(nèi)的線性優(yōu)化問(wèn)題,理解和實(shí)施起來(lái)較為簡(jiǎn)單,其關(guān)鍵之處在于局部模型的選取和切換準(zhǔn)確性,從而能夠使得整個(gè)控制過(guò)程平穩(wěn)進(jìn)行,保證系統(tǒng)的穩(wěn)定性和魯棒性。該類方法比較適用于熱工對(duì)象,因?yàn)榫植磕P偷墨@取較為容易,且不需要太多的局部模型即可反映出對(duì)象整體的特性[14],因而在熱工控制中可以優(yōu)先考慮。
2.2.3 閉環(huán)系統(tǒng)的穩(wěn)定性問(wèn)題
由于熱工對(duì)象的純滯后、非線性、時(shí)變等特性,使得預(yù)測(cè)控制算法在穩(wěn)定性方面的分析難度增大。通常預(yù)測(cè)控制的預(yù)測(cè)時(shí)域是有限的,然而算法在有限時(shí)域內(nèi)的最優(yōu)化求解并不能保證整個(gè)閉環(huán)系統(tǒng)的穩(wěn)定性[15]。穩(wěn)定預(yù)測(cè)控制算法的基本思想有兩種:一種是無(wú)限時(shí)域內(nèi)的預(yù)測(cè)控制,即為了保證系統(tǒng)穩(wěn)定,將有限的預(yù)測(cè)時(shí)域延伸至無(wú)限,但對(duì)于工程應(yīng)用而言,該方法對(duì)模型精度要求很高,無(wú)限時(shí)域內(nèi)的非線性優(yōu)化求解也較為復(fù)雜,難以用于實(shí)時(shí)控制;另一種常用的方法是在優(yōu)化問(wèn)題中加入穩(wěn)定性約束,如終端約束、收縮約束等,這些都是為了獲得穩(wěn)定的閉環(huán)系統(tǒng)而附加的狀態(tài)約束條件。這些條件使得優(yōu)化問(wèn)題的求解范圍變小,可能會(huì)導(dǎo)致一些不利的影響,如在線優(yōu)化計(jì)算量增大、控制性能下降等,使得系統(tǒng)的最終控制效果達(dá)不到預(yù)期要求。總結(jié)以上的討論可以看出:預(yù)測(cè)控制在算法的實(shí)時(shí)性、非線性處理、穩(wěn)定性等方面存在著相互影響和相互矛盾的特點(diǎn)。因此,如何權(quán)衡處理,研究適合工程使用的簡(jiǎn)化穩(wěn)定預(yù)測(cè)控制算法,是一個(gè)重要的方向。
2.2.4 算法中各參數(shù)的整定
參數(shù)如何整定也是控制系統(tǒng)能否取得良好效果的決定因素之一。預(yù)測(cè)控制算法中需要整定的參數(shù)較多,包括預(yù)測(cè)時(shí)域長(zhǎng)度P、控制時(shí)域長(zhǎng)度M、控制量加權(quán)系數(shù)λ、柔化系數(shù)α等。對(duì)于這些參數(shù)的整定,目前尚缺乏類似于PID那樣明確的整定準(zhǔn)則,只能給出大致的影響趨勢(shì)。文獻(xiàn)[16]針對(duì)熱工過(guò)程中的大量多容慣性對(duì)象,指出預(yù)測(cè)時(shí)域長(zhǎng)度P應(yīng)包含對(duì)象的主要特性,如時(shí)滯、非最小相位特性,增大P,將增加系統(tǒng)的衰減率;控制時(shí)域長(zhǎng)度M對(duì)動(dòng)態(tài)效果影響較小,取較小的M值即可滿足要求;加權(quán)系數(shù)λ主要影響控制增量的變化,λ增加,控制作用會(huì)變得平緩;而柔化系數(shù)α則對(duì)系統(tǒng)的快速性和穩(wěn)定性都產(chǎn)生影響,α越小,系統(tǒng)動(dòng)態(tài)響應(yīng)越迅速,但越容易變得振蕩。由于預(yù)測(cè)控制的參數(shù)整定存在一定的難度和不確定性,因此在工程應(yīng)用之前,為保證控制效果,減少現(xiàn)場(chǎng)調(diào)試時(shí)間,前期大量的仿真試驗(yàn)是必要的。
3 APC系統(tǒng)與DCS的連接
為保證APC系統(tǒng)能夠安全、平穩(wěn)地實(shí)現(xiàn),使得APC系統(tǒng)能夠很好地融入現(xiàn)有的DCS中,除了保證系統(tǒng)軟硬件、通信及主控算法的可靠性以外,針對(duì)系統(tǒng)之間連接,應(yīng)做好相應(yīng)的接口邏輯。考慮到正常情況下控制算法之間切換以及非正常情況的檢測(cè)和處理,具體實(shí)施時(shí)應(yīng)注意以下幾點(diǎn)。
3.1 系統(tǒng)之間的接口邏輯
APC系統(tǒng)應(yīng)與DCS中的常規(guī)控制系統(tǒng)共存,兩者既相互獨(dú)立,又可靈活選擇。一種合理的處理方式是,在DCS的控制通道中增加相應(yīng)接口邏輯,使得APC系統(tǒng)控制指令可以與DCS中常規(guī)控制系統(tǒng)的指令相互切換。這樣做的好處有:一是無(wú)需改變DCS中的控制策略,運(yùn)行人員可以在兩者之間進(jìn)行選擇和切換,增加了系統(tǒng)的靈活性;二是非正常情況下,如APC系統(tǒng)故障時(shí),系統(tǒng)可自動(dòng)切至DCS控制,保證了控制系統(tǒng)的安全性。
3.2 算法之間的跟蹤和無(wú)擾切換
為了實(shí)現(xiàn)兩套控制系統(tǒng)之間的無(wú)擾切換,要求做好指令的跟蹤邏輯,其基本原則是:切手動(dòng)控制時(shí),DCS控制指令和APC控制指令均跟蹤手動(dòng)指令;投自動(dòng)且為DCS控制方式時(shí),APC控制指令跟蹤DCS控制指令;投自動(dòng)且為APC控制時(shí),DCS控制指令跟蹤APC控制指令。這樣,在控制系統(tǒng)之間的切換就可以平穩(wěn)進(jìn)行,不會(huì)產(chǎn)生指令的突變。
3.3 非正常情況的檢測(cè)和判斷
非正常情況可分為兩大類:第一類是系統(tǒng)平臺(tái)軟硬件、通信類故障,這種情況可能導(dǎo)致APC的控制指令無(wú)法正確計(jì)算和發(fā)送;第二類是異常工況,如被調(diào)量等關(guān)鍵參數(shù)的超限或突變等,這時(shí)應(yīng)退出自動(dòng)。針對(duì)這兩類情況,本文給出了如圖2所示的原則性判斷和切換邏輯。
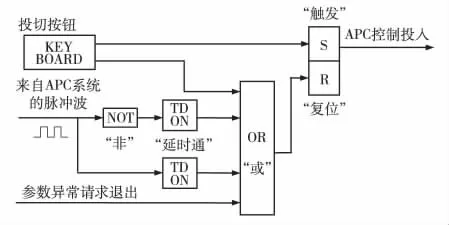
圖2 判斷和切換邏輯
圖2中KEYBOARD模塊用于APC系統(tǒng)在正常情況下的投切。來(lái)自APC系統(tǒng)的周期脈沖波用于檢測(cè)和判斷第一類故障,延時(shí)置位定時(shí)器TD_ON的延遲時(shí)間應(yīng)略大于脈沖波周期,若兩個(gè)TD_ON模塊中有一個(gè)輸出為1,則證明脈沖中斷,從而可以反映出系統(tǒng)發(fā)生軟硬件或通信類故障,這時(shí)RS觸發(fā)器復(fù)位,APC系統(tǒng)退出。通過(guò)對(duì)APC和DCS中的關(guān)鍵參數(shù)進(jìn)行實(shí)時(shí)監(jiān)視,判斷這些參數(shù)是否異常,從而判斷是否發(fā)生了第二類故障,若有參數(shù)異常,則發(fā)出請(qǐng)求APC系統(tǒng)退出指令,切至DCS控制。通過(guò)對(duì)以上原則性邏輯的擴(kuò)展和完善,可保證整個(gè)系統(tǒng)平穩(wěn)、安全地運(yùn)行。
4 結(jié)語(yǔ)
熱工過(guò)程被控對(duì)象由于其大滯后、時(shí)變、非線性等特性,采用DCS常規(guī)控制策略難以滿足越來(lái)越高的控制品質(zhì)要求。開(kāi)發(fā)基于APC算法的新型系統(tǒng),突破傳統(tǒng)控制思想,是今后熱工自動(dòng)化領(lǐng)域的重要發(fā)展方向,具有廣闊的市場(chǎng)前景。筆者以預(yù)測(cè)控制為例,針對(duì)APC系統(tǒng)在平臺(tái)選擇、算法開(kāi)發(fā)、切換邏輯等方面的關(guān)鍵問(wèn)題進(jìn)行了分析和研究,并提出了一些意見(jiàn)和結(jié)論。這些結(jié)論具有一定的通用性,其思路可以推廣至其他APC算法,為APC系統(tǒng)的工程實(shí)現(xiàn)打下了基礎(chǔ)。
由于算法的復(fù)雜性,目前APC系統(tǒng)還未能在現(xiàn)場(chǎng)大規(guī)模推廣實(shí)施,在算法的實(shí)時(shí)性、模型的非線性處理、閉環(huán)系統(tǒng)的穩(wěn)定性以及參數(shù)的優(yōu)化整定等方面,需要進(jìn)一步研究。
[1]劉吉臻,王淼鑫,郝祖龍.基于H∞的鍋爐再熱汽溫狀態(tài)變量的控制[J].動(dòng)力工程,2009,29(12):1105-1109,1122.
[2]孫磊,呂劍虹,魏靜.大型火電機(jī)組自動(dòng)發(fā)電控制優(yōu)化控制策略的研究[J].江蘇電機(jī)工程,2008,27(1):5-8.
[3]Andreescu G D,Antal R,Dan A M.Multivariable adaptive control with hardware-in-the-loop for a drum-type boiler-turbine system[C].//19th Mediterranean Conference on Control & Automation.Romania,2011:898-903.
[4]Karampoorian H R.Generalized model predictive control for multivariable boiler-turbine unit[C].//11th International Conference on Control,Automation and System.Iran,2011:811-814.
[5]王躍宣.先進(jìn)控制策略與軟件實(shí)現(xiàn)及應(yīng)用研究[D].浙江:浙江大學(xué),2003.
[6]尹娜,吳斌蕾.西門(mén)子PROFI優(yōu)化控制軟件調(diào)試與應(yīng)用[J].電力科學(xué)與工程,2010,26(10):68-70.
[7]張志勇,陳鋼,邱文超.基于現(xiàn)代控制技術(shù)的AGC實(shí)時(shí)優(yōu)化控制系統(tǒng)及其應(yīng)用[J].華東電力,2011,39(1):153-156.
[8]VanDoren V J.Techniques for adaptive control[M].USA:Elsevier Science,2003:88-96.
[9]Torgashov A Y,Park K C,Kang N S,et al.Optimizing robust model predictive control of industrial reactive stripping process system[J].Computer Aided Chemical Engineering,2003(18):829-834.
[10]陳增強(qiáng),劉瑞華,袁著祉,等.預(yù)測(cè)控制應(yīng)用于工業(yè)過(guò)程的若干問(wèn)題[J].自動(dòng)化與儀器儀表,1994(1):1-6,62-63.
[11]李奇安 .廣義預(yù)測(cè)控制算法簡(jiǎn)化實(shí)現(xiàn)方法研究[D].浙江:浙江大學(xué),2005.
[12]陳虹,劉志遠(yuǎn),解小華 .非線性模型預(yù)測(cè)控制的現(xiàn)狀與問(wèn)題[J].控制與決策,2001,16(4):385-391.
[13]Hui P,Yang Z J,Gui W H.Nonlinear system modeling and robust predictive control based on RBF-ARX model[J].Engineering Applications of Artificial Intelligence,2007,20(1):1-9.
[14]岳俊紅.復(fù)雜工業(yè)過(guò)程多模型預(yù)測(cè)控制策略及其應(yīng)用研究[D].北京:華北電力大學(xué),2007.
[15]Chen Wenhua.Stability analysis of classic finite horizon model predictive control[J].International Journal of Control Automation and Systems,2010,8(2):187-197.
[16]呂劍虹,陳來(lái)九.預(yù)測(cè)控制在熱工控制中的應(yīng)用前景[J].動(dòng)力工程,1997,17(2):12-15,6.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24