一種用于海面貼近目標的距離維聚心改進方法
2014-01-01 03:17:44徐佳龍黃曉剛
現(xiàn)代雷達 2014年4期
關鍵詞:檢測
徐佳龍,黃曉剛
(海軍駐南京地區(qū)航空軍事代表室, 南京210002)
0 引言
在對海搜索雷達中,一般都使用普通脈沖體制,常用的海I模式就是采用低重頻非相參處理工作[1]。在這類工作方式下,對貼近目標的分辨和跟蹤是一個研究難點[2],其中對目標信號的距離維聚心和方位維波束相關是處理中的關鍵環(huán)節(jié)[3]。
在常規(guī)的距離維聚心處理過程中,海面貼近目標會相互“遮蔽”,使參與方位維波束相關的點跡缺失或精度變差,合并后的目標信息不能滿足對貼近目標進行準確的分辨和跟蹤的要求。
本文首先介紹了常規(guī)的距離維聚心算法,列舉了實際海面貼近目標檢測中存在的問題,并在分析目標的距離方位特性的基礎上,提出了一種改進型的距離維聚心算法,對貼近目標的分辨能力和測量精度有較為明顯的改善。
1 海面目標的常規(guī)檢測及存在的問題
1.1 海面目標的常規(guī)檢測方法
常規(guī)檢測流程如圖1所示。在常用的海I模式中,一般以脈沖串為處理單位,非相參積累[4]后,可能會在一個或連續(xù)的幾個距離單元有目標檢出,如圖2所示,第633~638號距離單元回波幅度高于恒虛警檢測門限,視為有目標存在。
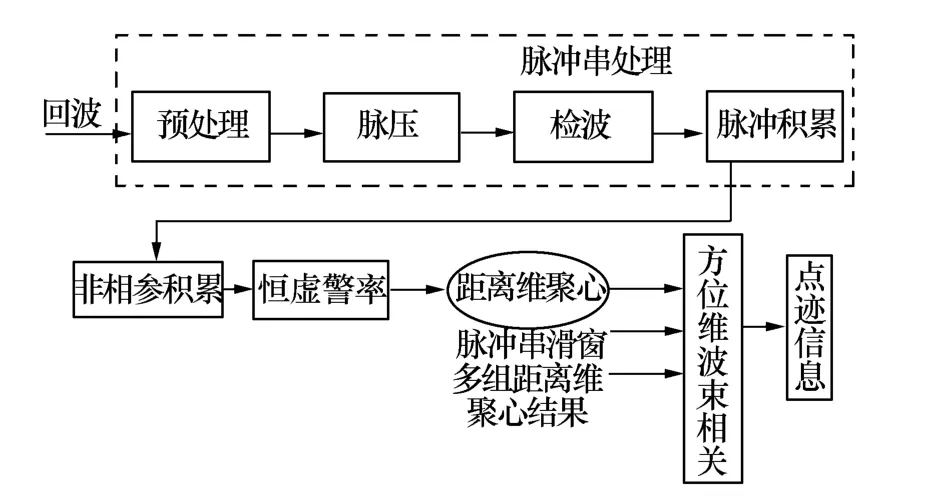
圖1 常規(guī)檢測流程圖
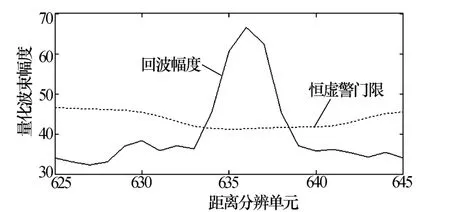
圖2 恒虛警率處理結果圖
針對目標在連續(xù)的多個門上都有恒虛警檢測結果的現(xiàn)象,為了得出較為準確的距離信息,需要進行距離維聚心處理:首先,取檢測報出的距離單元對應的滑窗非相參積累和,計算局部極大值和其左右相鄰距離單元為

式中:i表示距離單元。取3個距離單元的幅度距離一次加權處理結果作為目標的距離值輸出[5]

圖2中距離維聚心的結果Rtarget=636.2。
其次,在脈沖串非相參積累后,經(jīng)恒虛警檢測,再距離維聚心可以得到目標的一組信息。隨著波束指向的變化,對脈沖串做滑窗處理可以得到不同方位上目標信息,在方位維波束相關中,根據(jù)相關準則和波束結束準則,將多組距離維聚心輸出的點跡信息做波束合并,可得到目標距離方位信息。
1.2 常規(guī)方法存在的問題
當兩個目標在距離和方位上都比較貼近時,也會有連續(xù)多個距離分辨單元恒虛警檢出,在距離維上和單一目標的特征相近,如圖3所示。如果用常規(guī)的距離維聚心算法有時也只形成一個點跡信息,“遮蔽”了另一個目標。圖3是一組貼近目標的實例。
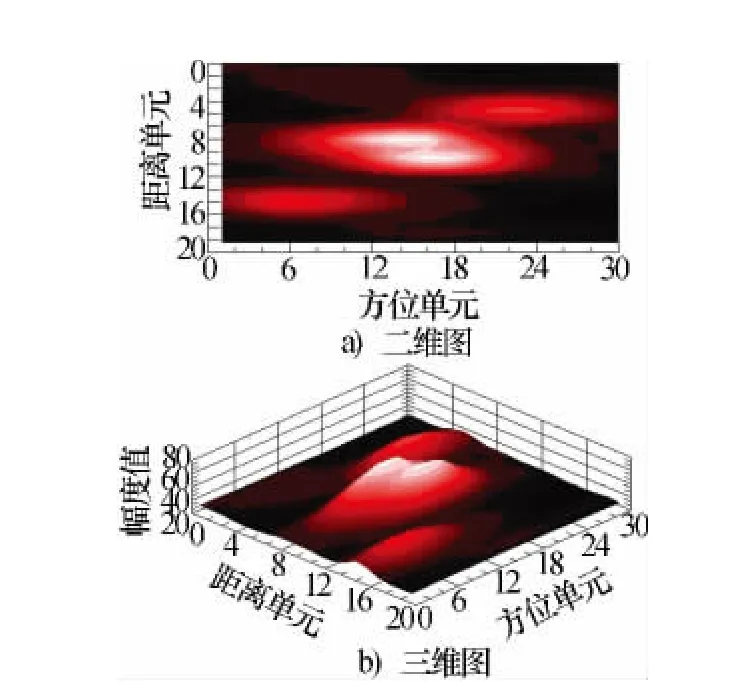
圖3 貼近目標實例
圖3a)中兩個目標在距離上共占據(jù)約6個距離單元,中心相差約2個距離單元;兩次滑窗處理形成的方位差計為一個方位單元,兩個目標在方位向共計約18個方位單元,方位中心相差約3個方位單元。中心處相鄰兩個方位單元(圖3a)中的第14、15方位單元)常規(guī)恒虛警檢測結果如圖4所示,圖中573~593對應圖2中縱軸的0~20。
按照式(1)、式(2)計算,圖4a)極大值在586號距離單元,距離維聚心結果Rtarget=585.99,圖4b)極大值在584號距離單元,Rtarget=584.11。從圖3a)中可以看出,圖4檢測出的應該是兩個目標,但方位維波束相關的門限通常大于兩個距離單元,兩個方位單元的檢測結果將被相關上。作為一個目標信息,或是雖然沒有被相關為同一目標,由于兩個目標的方位維信息有缺失,使得方位維波束相關后目標的方位信息精度變差。
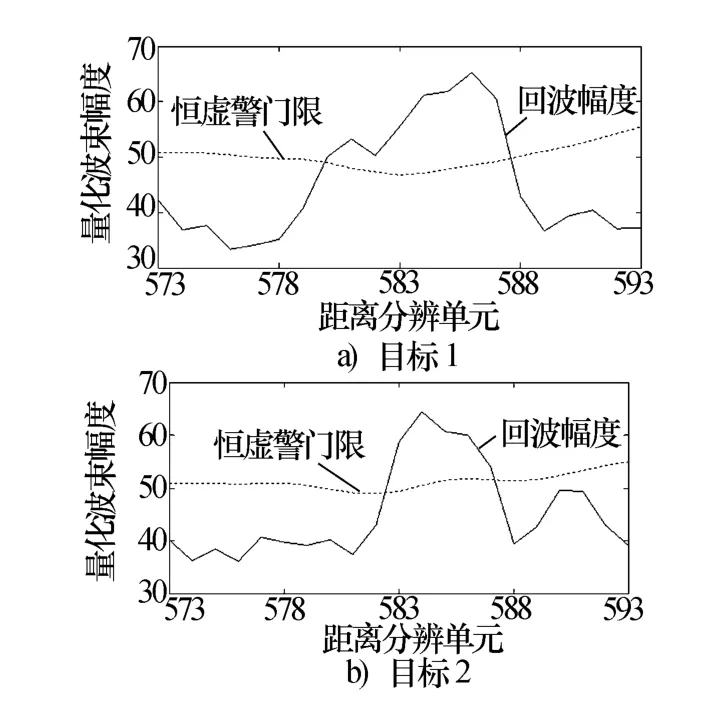
圖4 常規(guī)恒虛警檢測結果圖
2 改進型的距離維聚心算法
2.1 海面目標的距離方位特性
目標的回波由于波束寬度和距離分辨率等因素,會在連續(xù)的距離單元和方位向上有高出背景的幅度,視頻上呈粗眉毛狀,如圖5所示。海面船只是海面目標的主要組成部分,尺寸從幾米至幾百米不等,在距離維上表現(xiàn)出幾個或幾十個距離單元的回波特征。如果采樣帶寬較大,船體沿波束方向較長,結構比較復雜,連續(xù)距離單元幅度也會有相應復雜變化[6],但對于檢測常用的窄帶信號,海面大小船只在距離上的幅度多呈包絡狀。
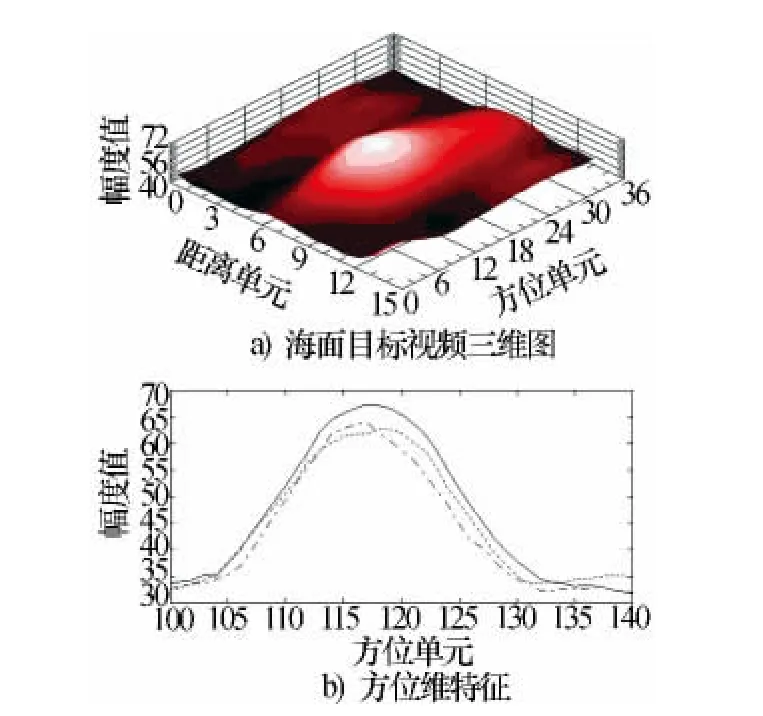
圖5 海面目標距離維幅度特性和方位特征
天線的主瓣在3 dB范圍內,增益指數(shù)可以用二次函數(shù)或角度函數(shù)逼近,它對點目標(大多數(shù)海面目標可以被認為是點目標)的回波在方位上起調制作用。同時,由于船體機構、雷達系統(tǒng)參數(shù)和和周圍海浪回波的影響,點目標方位上回波幅度有一定的起伏,但能量集中在幅度較大的幾個距離單元上,且幅度有相同的變化規(guī)律和較強的相關性,如圖5所示。取圖5b)中第5(虛線)、6(實線)、7(點畫線)號距離單元,它們有類似的包絡形狀,其中中心處的6號距離單元有最大幅度。
常規(guī)的距離維聚心利用了距離維幅度包絡,將跨越多個距離單元的目標信息加權處理,提高距離精度,但是這種基于滑窗內脈沖串的非相參積累的處理方法忽略了滑窗中帶有的方位信息。所以,在檢測距離相近,方位略微分開的目標時,如果距離維的幅度包絡信息沒有產(chǎn)生明顯的分裂現(xiàn)象,會存在著較大的缺陷。
2.2 改進型的距離維聚心算法
針對常規(guī)距離維聚心算法的缺點,需要對恒虛警檢測出的連續(xù)距離單元分析滑窗內的N個脈沖串對應距離單元幅度信息,計算檢出距離單元內相鄰單元方位幅度的相似性,如果相似值有局部極值,則在這兩個距離單元間設定聚心分離點,在分離點兩側分別做常規(guī)的距離維聚心處理。由于滑窗內積累的脈沖數(shù)N有限,只能對N個方位單元的幅度信息做相似性計算。流程如圖6所示。
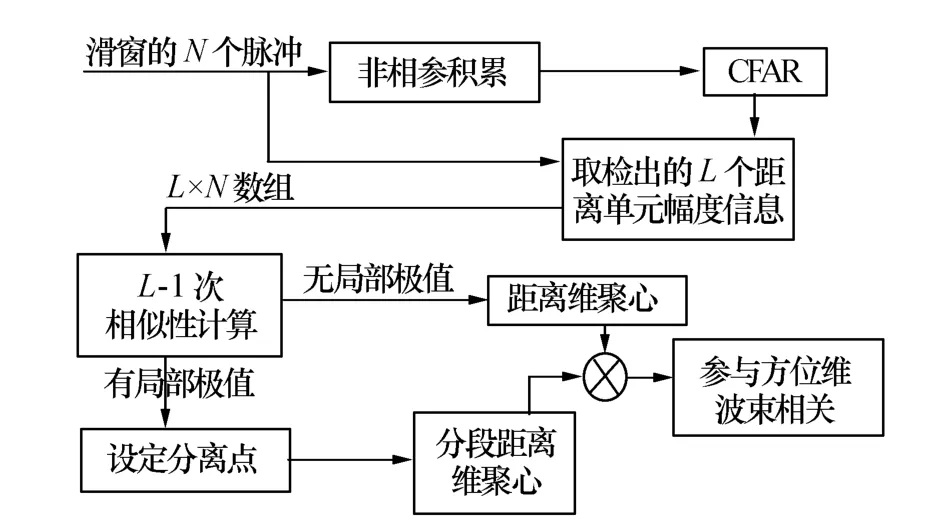
圖6 改進型距離維聚心流程圖
針對圖4中實測數(shù)據(jù)按照流程算法,取出的L×N數(shù)組,記作 Al,j,l?(582,586)表示恒虛警檢測出的連續(xù)距離單元,j?(1,N)表示滑窗中的脈沖,計算相似性 C(Ak,j,Ak+1,j,k?(582,585),結果見表 1。


表1 相似度計算
如圖7所示,第584、585號距離單元不具有單個目標在方位維的特征,在相似性計算中出現(xiàn)了局部極值點,可在第584號距離單元設定分離點。
分別在對分離點兩端做距離維聚心,582、583、584的結果為583.01,584、585、586 的結果為584.90,這樣就成功地將兩個目標分開。
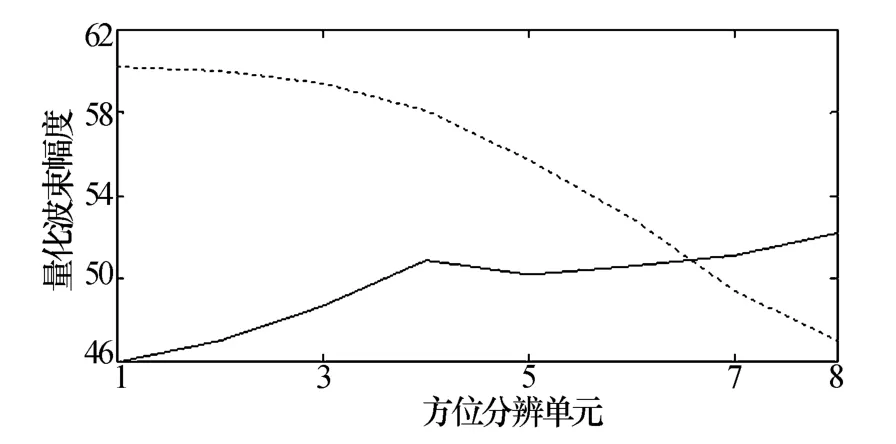
圖7 分離點相鄰距離單元方位維特征圖
改進型距離維聚心算法仍然以脈沖串為處理單位,增加了檢出單元信息提取和相似性計算,較常規(guī)型算法計算量略微增加,方便于工程中的實現(xiàn)。
3 分辨能力和測量精度的改善
使用改進型距離維聚心處理算法可以進一步改善海面貼近目標的分辨能力和測量精度。對圖3實例使用常規(guī)距離維聚心和改進型距離維聚心算法,方位單元的聚心結果列舉部分見表2。

表2 聚心算法與常規(guī)算法方位單元聚心結果的比較
在4~20號方位單元內兩種算法都有目標檢出,改進型距離維聚心在7~15號方位單元中還檢出被“遮蔽”的目標。表中顯示,在11、12號方位單元,常規(guī)距離維聚心檢出的目標距離有約兩個距離單元的階躍,這是兩個目標的脈沖串非相參積累和值大小發(fā)生了交替,如圖4中所示,相鄰第14、15方位單元的局部極大值發(fā)生的變化。
距離維聚心結果進行方位維波束相關,對滿足相關準則的目標信息運用數(shù)中心、幅度加權或是幅度平方加權等相關算法。由于滑窗處理的影響,目標方位需要修正N/2。表3列舉了相關準則不同時相關形成的目標距離方位信息結果。
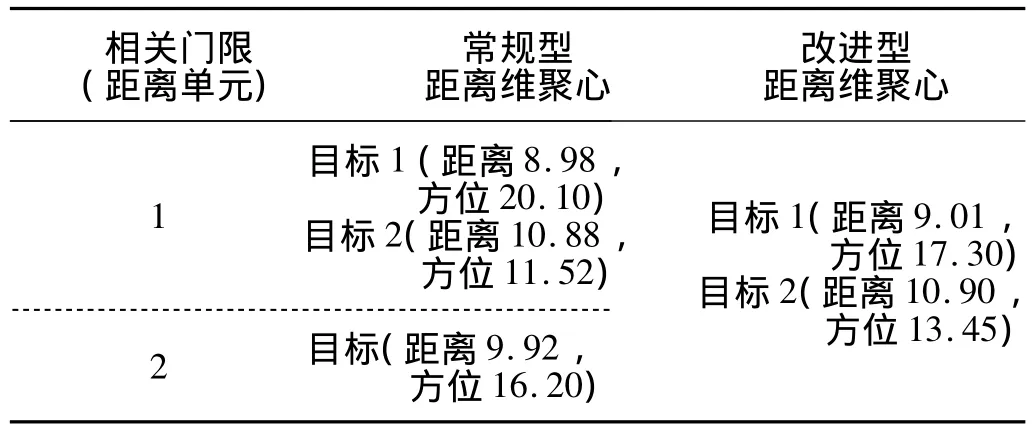
表3 聚心算法與常規(guī)算法距離維聚心結果的比較
由圖3和表3結果比較后可以看出,改進型距離維聚心的計算結果與實際情況基本一致。
通過大量實測數(shù)據(jù)驗證,該改進算法基本有效。但是針對海雜波區(qū)內的小目標或是遠距離目標時,由于回波幅度較弱,通常歸一化信噪比小于10 dB,目標在方位維起伏較大,改進算法的使用將受到限制。
相似性門限的選擇與波形時域頻域參數(shù)有關,在2 MB帶寬和距離分辨率為150 m的情況下,門限一般選擇6。
4 結束語
海面的漁船或是艦船編隊通常會密集排列,對于此類貼近目標,常規(guī)的距離維聚心在檢測目標時存在缺陷。本文提出的改進型距離維聚心算法,不僅有利于對貼近目標進行有效分辨,還可提高測量精度,而且工程上也易于實現(xiàn)。
[1] 賁 德,韋傳安,林幼權.機載雷達技術[M].北京:電子工業(yè)出版社,2006.Ben De,Wei Chuanan,Lin Youquan.Airborne radar technology[M].Beijing:Publishing House of Electronics Industry,2006.
[2] Lacomme P,Marchais J C,Hardange J P,et al.Air and space borne radar systems:an introduction[M].New York:William Andrew Publishing,2007.
[3] 吳順君,梅曉春.雷達信號處理和數(shù)據(jù)處理技術[M].北京:電子工業(yè)出版社,2004.Wu Shunjun,Mei Xiaochun.Radar signal and data processing technology[M].Beijing:Publishing House of Electronics Industry,2004.
[4] 李宗武.直升機機載雷達抗海雜波技術研究[J].現(xiàn)代雷達,2000,22(1):10-14.Li Zongwu.Anti-sea clutter technology for airborne radar on a helicopter[J].Modern Radar,2000,22(1):10-14.
[5] 黃培康,殷紅成,許小劍.雷達目標特性[M].北京:電子工業(yè)出版社,2005.Huang Peikang,Yin Hongcheng,Xu Xiaojian.Radar target characteristics[M].Beijing:Publishing House of Electronics Industry,2005.
[6] 楊文琳,方志宏,阮信暢,等.雷達點跡凝聚處理技術及其數(shù)據(jù)分析[J].信號處理,2001,17(2):130-138.Yang Wenlin,F(xiàn)ang Zhihong,Ruan Xinchang,et al.The radar plots centroid technology and data analysis[J].Signal Processing,2001,17(2):130-138.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48