載波相位差分技術在山地道路測量中的應用淺談
2014-01-08 08:16:30王佳卿史曉忠儲友兵
城市道橋與防洪 2014年10期
王佳卿 ,史曉忠 ,儲友兵
(1.同濟大學測繪與地理信息學院,上海市 200092;2.無錫市政設計研究院有限公司,江蘇無錫 214072)
0 引言
目前,動態測量實時定位的 GPS 載波相位差分技術,簡稱 RTK(Real Time Kinematics)定位技術,就是基于載波相位觀測值的實時動態定位技術。它能夠實時提供測站點在指定坐標系統中的三維定位結果,并且達到厘米級精度,其已經在施工放樣實踐中成功應用。該技術保留了 GPS 測量的高精度,同時又具有實時性。
1 RTK 技術特點
1.1 RTK 的硬件條件
一般來說,用 RTK 來進行作業的最低配置為:
(1)可用于 RTK 作業的 GPS 接收機;
(2)一對數據鏈;
(3)電源設備。
1.2 RTK 的軟件條件
RTK 要求實時提供流動站相對于基準站的三維定位成果,并完成相應的坐標轉換和投影計算。這樣就必須有一個能提供功能比較強大的軟件系統來支持上面的任務實現,同時軟件還必須具有原有的各種靜態、動態及 RTKGPS 作業模式,而且能夠讓用戶對原有的軟件版本進行升級,或者二次開發,軟件還應該與其他的測量儀器進行數據共享。在軟件的使用上,用戶可以選用 RTK 隨機配備的工程軟件,也可自行開發使用軟件。
1.3 RTK 定位技術的實現
RTK 定位技術需要在基準站與流動站之間增加一套無線數字通訊系統(亦稱數據鏈),將兩個相對獨立的 GPS 信號接收系統聯成有機整體。基準站通過電臺或者手機將觀測數據和測站數據傳輸給流動站,流動站將基準站傳來的載波觀測信號與流動站本身測得的載波觀測信號進行差分處理,解出兩站之間的基線值,同時輸入相應的坐標轉換和投影參數,實時得到測點坐標,因此,RTK 定位的關鍵除數據傳輸技術外,還需要有很強的數據處理能力。圖1為 GPS-RTK 數據流程示意。

圖1 GPS-RTK 數據流程示意圖
1.4 RTK 的數據處理
(1)整周未知數的探索技術
RTK 的數據處理是在實時狀態下在控制器內進行的,基于線性無偏最小方差估計原理和卡爾曼濾波技術來處理每一個歷元的觀測值。一般說,RTK 作業的數據處理的關鍵也就是對整周未知數的正確求解,能實時地搜索并且惟一地判斷相對觀測量的初始整周未知數。一般常用的搜索方法有:消去法、模糊度函數法、優化 Cholesky 分解法、整周未知數快速逼近法(FARA 法)。一般說來,優化Cholesky 分解法采用的是當前時刻為止的所有的歷元觀測值,同時會自動追加觀測值,與其他的搜索方法相比,它的搜索速度的提高是十分顯著的。它運用了 RATIO 檢驗和 OVT 檢驗,能夠有效地檢驗解的可靠性,不會出現解的發散問題,是目前比較成熟的方法之一[1]。
(2)坐標轉換
為在定測中運用 RTK 技術,應首先建立 RTK作業的基準站網絡,即控制網。點之間的距離可以是幾公里或十幾公里,這些點構成線路的首級控制網,它不僅有 WGS 一 84 坐標,同時也有線路坐標系的坐標。在 RTK 作業時應求得轉換參數以進行兩種坐標系的實時轉換。在兩個控制點間的線路應選用該兩點的兩套坐標求轉換參數。
在整周模糊度正確求解以后,系統按單差觀測方程給出基線向量的解 (△xij,△yij,△zij,i 為基準站,j 為流動站),顧及基準站的地心坐標(xi,yi,z)i,則給出流動站的瞬時地心坐標[2]:

然后再進行地心坐標(x,y,z)G與地方坐標(x,y,z)T的轉換[3]:
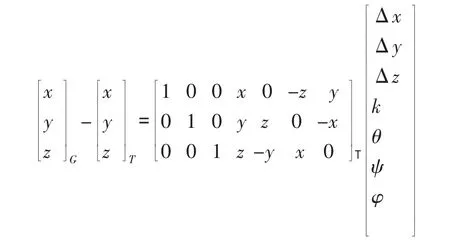
式中,△x,△y,△z,k,θ,ψ,φ 等 7 個參數通過RTK 作業前的聯測得到。聯測應需要至少 3 個分布均勻的已知點,最好分布在測區的四周,作業時取其中之一為基準站,地方坐標系可以是國家坐標系,也可以是用戶自定義的坐標系,計算在高斯投影面上進行,以投影平面上的坐標形式輸出。應該指出,這組轉換參數僅適用于公共點圈定的區域及鄰近地區,外推的精度明顯低于內插精度。
1.5 影響 RTK 成果精度的因素
一般來說,影響 RTK 成果精度的因素主要是GPS 觀測共有誤差源,除此之外,還受基線解算精度、基準站點位精度、坐標系轉換精度的影響。在RTK 作業中,基線解算精度可以達到 10 CB+1 m.D;基準站點位精度平均在 3 CB 之內;坐標系轉換精度,對于 10 km 基線亦在 3 CB 以內,動態作業由于測距偏心,天線高誤差等一般也在 3 cm 以內,至于正常高擬合與內插精度取決于聯測點數目與分布、擬合模型等,一般在 5~10 CB 內是能夠做到的。總的來說,RTK 的精度為 CB 級,一般的應用是足夠的[4]。
2 工程測量應用實例及精度評價
2.1 工程概況
無錫市桃花山垃圾填埋場盤山公路位于無錫市濱湖區,設計全長約 5 km。現狀地形多為山嶺丘陵。該工程由于通視條件較差,其中樁放樣及縱橫斷面的測量采用 Leica RX1250XC GPS-RTK 和Leica TCR802/全站儀結合進行測設。
2.2 作業原則與特點
道路的中線放測最重要的原則是要保證所放測點均能在設計線路上,平面位置誤差不應超過5~10 cm,高程誤差不應超過± 5 cm。在該工程中,設計線路帶狀區域有本地 GPS 平面控制網,所以采用本地城市坐標系。采用傳統方法用布設導線和水準路線,以求出導線點的坐標和高程,以方便傳統測量方法和 RTK 技術進行比較。具體放樣過程中,流動站接收機輸入本地坐標轉換參數,在整周模糊度解計算成功后,沿設計線路對地形地貌逐一放測,并實時注意質量控制因子的變化情況。
2.3 測量結果的精度評估
RTK 放樣結果的精度除受基準站點位精度影響外,還受模糊度解算誤差、坐標系統轉換誤差、GPS 天線對中誤差等的影響,因而在上述工程的實際放樣工作中,流動臺在放樣施測的同時,隨時對沿線的已知 GPS 控制點進行比測,比測情況見表1、表2。

表1 部分 RTK 與全站儀同樁號坐標誤差比較
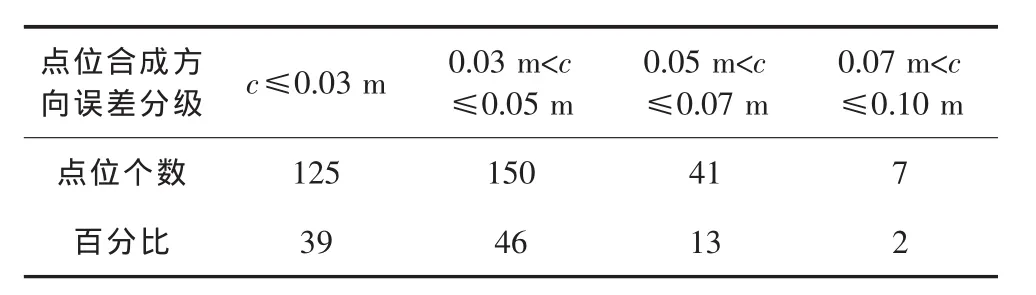
表2 坐標誤差統計表
從表1、表2可以看出,RTK 測量的點位精度可達厘米級,與傳統測量方法相比各點位之間不存在誤差累積,能夠滿足道路放樣測量的精度要求。
3 結語
RTK 技術是 GPS 定位技術的一個新的里程碑,它不僅具有 GPS 技術的所有優點,而且可以實時獲得觀測結果及精度,大大地提高了作業效率,并開拓了 GPS 新的應用領域。通過應用得到了以下結論:
(1)由于載波相位測量、差分處理技術、整周未知數、快速求解技術以及移動數據通信技術的融合,使 RTK 在精度、速度、實時性上達到了比較完滿的結合,并使得 RTK 定位技術大大擴展了它的應用范圍。
(2)該法應用于等級公路放樣測量,其定位精度可達到厘米級,完全能夠滿足規范要求。
(3)該法在施測過程中,能實時檢驗質量控制指標,因而能實時提供經檢驗的成果資料,大大提高了生產效率。
(4)在困難地區,采用常規全站儀放測極不方便,且難以保證精度,使用該法是非常有利的。
[1] 周忠漠.地面網與衛星網之間的轉換數學模型[M].北京:測繪出版社,1984.
[2] CJJ 8—1999,城市測量規范[S].
[3] GB 50026—2007,工程測量規范[S].
[4] 李德仁,關澤群.空間信息系統的集成與實現[M].武漢:武漢測繪科技大學出版社,2000.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30