2951-BⅢ型電鏟交流傳動系統分析
2014-01-27 03:00:20盧利虹張忠
大連交通大學學報 2014年3期
關鍵詞:交流
盧利虹,張忠
(大連交通大學 電氣信息學院,遼寧 大連 116028)*
2951-BⅢ型電鏟交流傳動系統分析
盧利虹,張忠
(大連交通大學 電氣信息學院,遼寧 大連 116028)*
對工礦企業2951-BⅢ型電鏟的工作原理及其電氣系統主電路進行分析.該系統具有啟動力距大、恒功調速范圍寬、防空轉性能好、對通訊干擾小等優點.采用三相交流異步電機則可做到功率大、體積小、重量輕、結構簡單、運行可靠,具有較好的應用前景.
交流傳動;異步機驅動;四象限變流器;脈寬調制逆變器;轉差控制
0 引言
三相交流傳動系統有兩類,一類稱交—直—交傳動,另一類稱交—交傳動.2951-BⅢ型電鏟是采用前者,其電動機普遍采用三相交流異步機.直流電動機雖然有良好的調速性能,但主要的缺點是必須有換向器,這不僅重量和尺寸大,費銅,而且故障率高,維修保養工作量大.交流電機沒有這些缺點.但是,異步電機的轉速決定它的供電電源頻率.當電源頻率一定時,它的轉速變化范圍很小,要把它作為調速電機時,必須對供電電源的頻率作大范圍的調節.因此,交流傳動的關鍵是在交流供電電源和交流電機之間設置一個大功率、寬調頻的變頻裝置.
1 交流異步機驅動調速原理
交—直—交電傳動系統是先將交流電整成直流,經過中間直流環節,再經逆變器變為電壓、頻率可調的三相交流電,供給三相交流異步機驅動電鏟車負載.作為驅動電鏟的三相交流異步機,其機械特性必須符合理想的驅動特性.但異步機的機械特性是一條硬特性,與理想的特性相差甚遠.從電機原理可知,電機轉速等于同步轉速n1時,而轉矩M為零.當轉差率很小時,隨負載轉矩增加,電機轉速相對同步轉速逐漸下降,而轉矩隨著轉速的減少直線上升,沿特性曲線n1B知道臨界點A.此后如果電動機負載轉矩超過臨界轉矩,電機將工作在不穩定狀態,電動機轉速急劇下降直至停轉,如圖1所示.
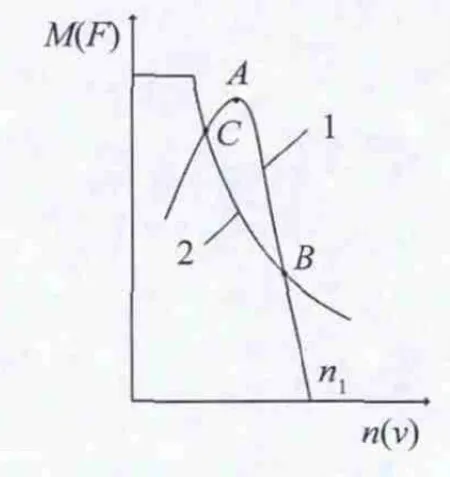
圖1 異步電動機的特性曲線
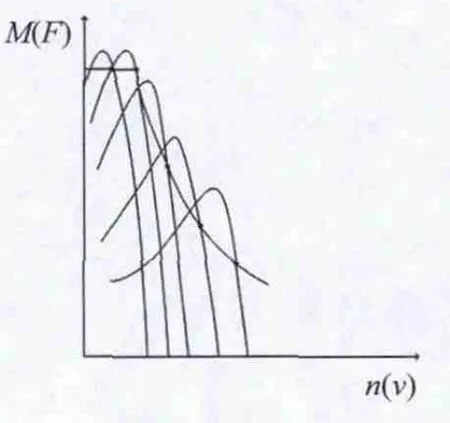
圖2 變化的異步電動機機械特性
一臺普通的異步電動機機械特性曲線(曲線1)與理想的驅動特性(曲線2)只相交于C、B兩點,只有B點才是穩定工作點.在An1范圍內異步電機雖然能穩定運行,但負載變化很大時,轉速變化卻很小(幾乎恒速),故異步電機的特性必須進行調節才能適應負載的驅動特性的要求.因此,異步電動機必須有多條(不同供電條件下)機械特性曲線和理想驅動特性相交,把這些交點(共5點)連接起來,就成為一條模擬的理想驅動特性曲線.(如圖2所示)這時就可以得到一系列穩定的工作點,從而滿足負載特性的要求.但是,在確定供電的條件下(固定的電壓、頻率)只能對應一條特性曲線,欲得到多條(圖2所示共5條)特性曲線必須使供電電壓、頻率連續的變化,相應的得到連續變化的特性曲線,異步機的調速原理就是從這一思路出發的.
由電機學可知,異步機的轉速公式為

由式(1)可知異步機的調速方法有三種:①改變極對數p調速用繞組連接來實現的;②改變轉差率s調速;上述兩種只能局部不連續調整轉速,不可取;③改變供電頻率f調速.
此法和上述兩種方法有本質的不同,以改變定子供電頻率來改變電機的同步轉速達到調速的目的,在調速過程中無論在高速或低速都保持著有限的轉差率,因此具有高效率、調速范圍廣、調節精度高等優點,是理想的調速方法.這是通過大功率可關斷晶閘管組成的PWM調制逆變器來實現的,門控是微機實時控制的.
2 電鏟電氣系統主電路
電鏟電氣系統主電路主要部分是由電網側的四象限脈沖整流器和電機側逆變器構成,分別對其予以簡單的討論.
2.1 兩點式及三點式逆變器
本電鏟是采用的兩點式逆變器,也稱之為二級逆變器.其特點是把中間回路正極或負極的電位接到電機上.隨科技進步,目前的電路中,已采用多點式逆變器,其中以三點式電路具有明顯的優點.它除具備兩點式的特點外,還能把中間直流電壓回路中點電位送到電機端,故此也稱中點嵌位逆變器,其中主要優點:①功率元件的阻斷電壓被限制在輸入端直流電壓的一半,即可以提高中間直流回路電壓1倍(對元件使用有利);②比兩點式逆變器的諧波分量少,在一個周期內前者電路只有7種狀態,后者有19種.因此有利于減少相鄰兩種電路間轉換時引起的電壓、電流波動.從而有利降低損耗、提高電動機和系統的效率,減少轉矩的脈動.
2.2 四象限脈沖整流器
這個環節的功能是為了改善電鏟系統的功率因數和減少諧波對電網的干擾.因此在電鏟交—直—交主電路除電機側有逆變器外,在電源側還設有四象限脈沖整流器.從本質上講,它是按升壓交-直流斬波方式工作的整流器,所以它也常稱作脈沖整流器.它又能在電壓、電流平面上所有四個象限中工作(正反向電動、正反向再生狀態),所以稱四象限脈沖整流器.圖3是四象限脈沖整流器原理電路圖.同樣,它與PWM逆變器相比較,也有兩個橋臂組成.每個橋臂電路的控制方法也相類似,即由三角波與正弦調制波的交點來決定橋臂中的上下功率元件的換流時刻.兩個平行的橋臂中的正弦調制波相位互差180°.由于電源側回路電感(變壓器的漏感)作用:可使中間回路直流電壓Ud高于整流橋(D1—D4)所產生的整流電壓,如式(2).

圖3 四象限脈沖整流器原理電路圖

式中,UN-m為交流網壓峰值.譬如在正半波時,(圖3中U端為正、V端為負)觸發T2,變壓器次邊繞組通過T2—D4短接,由于變壓器具有相當大短路阻抗(對于50 Hz供電網,通常短路阻抗UK>30%),所以電流上升率被抑制.此刻讓T2重新關斷,于是,變壓器的次邊電壓再加上其漏感儲能形成的電壓,它比中間直流回路的電壓要大,所以電流從變壓器經D1、D4流入中間回路.這正是上述的交直升壓斬波的結果,較低的變壓器的次邊電壓可以把中間直流回路電壓抬高130%.對于負半波也可類推.
如果為進一步改善電網質量,提高其功率因數,可以把幾組四象限脈沖整流器錯開相位進行斬波(如相互相位移90°),從而可以成倍的提高斬波頻率.四象限脈沖整流器改善電鏟系統的功率因數原理簡述如下:系統的功率因數

式中,μ為系統功率因數;cosφ為相位系數 ;λ為電流畸變系數.
通過調制,可使直流電壓Ud在電源回路U、V端產生工頻交流正弦電壓Us1.通過對Us1相位和幅值的控制,可以達到電源側回路內電流IN與網壓UN同相位,即基波相位系數等于1,同時因調制頻率足夠高,或電網側(變壓器)漏感LN足夠大可抑制電流畸變,即電流畸變系數λ≈1,如此μ=λ·cosφ ≈1.
圖4(a)為四象限脈沖整流器等值電路圖,圖4(b)為其向量圖.

圖4 四象限脈沖整流器調節的等值電路及其向量圖

四象限脈沖整流器調制電壓的基波分量為

假定四象限脈沖整流器和中間儲能的損耗忽略,那么,交流端和直流端的功率在每時刻都必須相等,即

式中,i為四象限脈沖整流器流出的電流(見圖4),把上述關系代入,可有如下式

式中直流分量

而式(10)為兩倍網頻的交流分量,可以通過串聯諧振電路L2、C2慮除掉.
必須指出,有限的調制開關頻率和確定供電網絡漏感下(變壓器漏感)LNus除了基波分量us1外,還包含更高次諧波分量,在供電網中同樣也存在高次諧波分量.所以,即使cosφ=1,但由于λ<1,供電網的功率因數μ也略<1,從電鏟說明書上看到μ=0.955的數據是可信的,合理的.
4 結論
2951-BⅢ 型電鏟是一個典型的交—直—交傳動系統,其精華所在就是接電源側的四象限脈沖整流器,能把制動能量回饋給電網,以供給平行作業的其他設備的電鏟,可見節約能源是本設備的最大優勢。在負荷低的工況下自動(程序)斷開與電網聯接,轉換為能耗制動,作為突出重點來維持電網側高的功率因數,這不但可以改善本系統的功率因數,也可以減少諧波電流對電網的干擾(不污染電網,釀成公害).本設備的設計思想是很可貴的.其次是在電機側的逆變器為三點式(或多電平式)可更會有效的減少諧波分量,以利于降低損耗,提高電機和系統效率,減少轉矩脈動以錦上添花.
[1]范國偉.電機原理與電力拖動[M].北京:人民郵電出版社,2012.
[2]陳勇,羅平,向敏.電力拖動與控制[M].北京:人民郵電出版社,2011.
[3]王兆安,劉進軍.電力電子技術[M].北京:機械工業出版社,2010.
[4]馮曉云.交流傳動及其控制系統[M].北京:高等教育出版社,2009.
嗎:B
1673-9590(2014)03-0118-03
10.13291/j.cnki.djdxac.2014.03.028
2013-05-04
盧利虹(1962-),女,講師,學士,主要從事電氣工程技術及設備的研究
E-mail:dq-llh@163.com.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
