焊線機超聲波發生器數字化頻率跟蹤系統設計*
2014-02-10 02:56:31柯昌鏘
機電工程技術 2014年10期
關鍵詞:信號
柯昌鏘
(廣東工業大學機電工程學院,廣東廣州 510006)
焊線機超聲波發生器數字化頻率跟蹤系統設計*
柯昌鏘
(廣東工業大學機電工程學院,廣東廣州 510006)
焊線機超聲引線鍵合過程中,由于溫度、壓力、環境等因素的變化會導致超聲換能器的諧振頻率發生漂移。在分析超聲換能器電特性的基礎上,闡述了阻抗相位反饋調諧的原理以及基于FPGA的數字化頻率跟蹤系統的設計,與傳統的方法相比,系統跟蹤響應速度快,跟蹤實時性好,而且跟蹤頻率范圍寬,具有較強的實用性。
超聲波發生器;FPGA;頻率跟蹤;數字鑒相器
0 引言
焊線機超聲引線鍵合技術是指利用熱、力、超聲能量的耦合作用,通過超聲振動和劈刀壓力,將半導體芯片與焊盤、基板或電子封裝外殼引腳用金屬絲相連接的工藝技術[1]。工作時超聲波發生器發出的電功率信號驅動壓電陶瓷,壓電陶瓷將電功率信號轉換成機械振動,振動經變幅桿和劈刀傳輸,放大以后作用在鍵合界面上[2]。
焊線機工作中超聲換能器隨著溫度、壓力、環境等因素的變化會導致其諧振頻率發生漂移,而諧振頻率的漂移將使換能器的工作效率降低,甚至會損壞換能器元件[3],為了使系統輸出功率最大,損耗最小,應使系統工作在諧振狀態下。焊線機超聲波發生器的好壞直接影響到焊接質量,要保證高效、可靠的焊線質量,超聲波發生器的工作頻率必須能跟隨換能器的諧振頻率。傳統的模擬鎖相環對電路集成化和數字化形成了制約,因此設計數字化自動跟蹤諧振頻率系統,對超聲波換能器高效、穩定的運行具有重要的現實意義。
本文首先分析焊線機超聲換能器的電特性,為阻抗相位反饋調諧提供理論依據;然后基于FP?GA設計數字化頻率跟蹤系統,與傳統方法相比,本系統的跟蹤響應速度快,跟蹤實時性好,而且跟蹤頻率范圍寬。
1 超聲換能器的電特性分析
研究表明當超聲換能器激勵電功率信號的頻率與換能器的固有頻率一致時,換能器的振動處于穩定的狀態,它服從受迫振動規律:

式(1)各參數的含義如下:m表示超聲換能器的質量;Rm表示換能器的機械內阻;Cm為換能器的柔度;F(t)為換能器兩端的電壓與力電轉換系數的乘積。
對換能器的性能進行分析時,可以利用機電模型的相關理論將機械系統模型等效為電學電路模型。超聲換能器的等效電學電路[4]如圖1所示。為:

圖1 超聲換能器等效電學電路

比較(1)式和(2)式可知,動態電感L1、動態電阻R1和動態電容C1可以分別表征超聲換能器的質量m、機械內阻Rm和柔度Cm。
通過引入導納模型可以簡化電路分析,由電學知識可知,靜態支路和動態支路的導納分別如(3)式和(4)式:
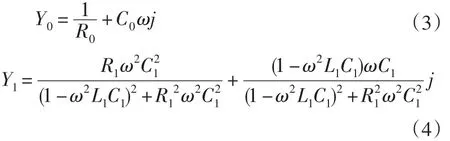
換能器等效電學電路由動態支路和靜態支路并聯組成,其中動態支路又稱為機械臂,由動態電阻R1、動態電感 L1、動態電容C1串聯組成;靜態支路又稱為電學臂,由靜態電阻R0和靜態電容C0并聯組成。機械臂的等效模型又可以表示
超聲換能器的總導納為:Y=Y0+Y1=G+Bj,聯合(3)式和(4)式得:

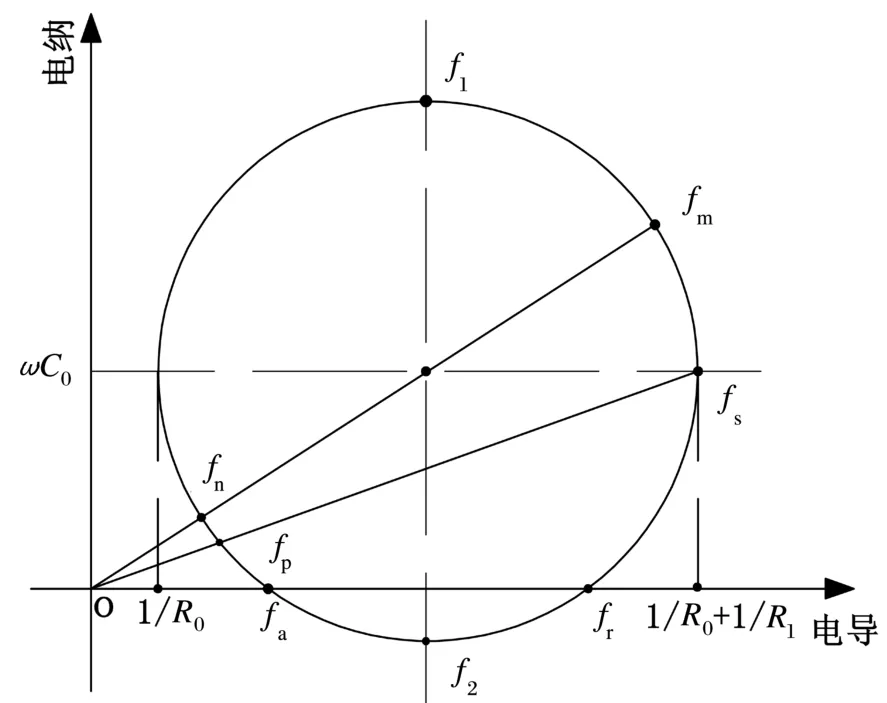
圖2 超聲換能器等效電路導納圓示意圖
導納圓與電導坐標軸的交點 fr及 fa表示換能器等效電路呈純阻性,分別定義為超聲換能器諧振頻率及反諧振頻率。而對于換能器等效動態支路,當動態支路的電流與電壓相位相同時,動態支路處于諧振狀態,也表現為純阻性,即機械臂處于諧振狀態,此時諧振頻率的大小為,對應于導納圓上的 fs,稱為機械諧振頻率。
因此換能器的諧振頻率與機械諧振頻率為兩個不同的頻率,但對于焊線機超聲波換能器,由于靜態電容很小且動態電阻大,換能器的諧振頻率與機械諧振頻率相差很小,激勵電功率信號的工作頻率可以跟蹤換能器的諧振頻率[5],使換能器處于良好的工作狀態。當換能器兩端電壓信號的相位超前電流信號的相位時,換能器呈感性,則系統需要降低工作頻率;當換能器兩端電壓信號的相位滯后電流信號的相位時,換能器呈容性,則系統需要提高工作頻率。基于此本文設計數字化的頻率跟蹤器來補償相位差,使得換能器兩端電壓信號的相位逼近電流信號的相位,從而使換能器工作于諧振狀態。
2 數字化頻率跟蹤系統總體方案設計
本文選用 Altera公司的 FPGA芯片EP2C5T144C8N作為信號發生器和數字化頻率跟蹤控制器。利用Verilog HDL硬件語言,基于FP?GA設計電功率信號產生模塊及頻率跟蹤模塊,總體結構如圖3所示。
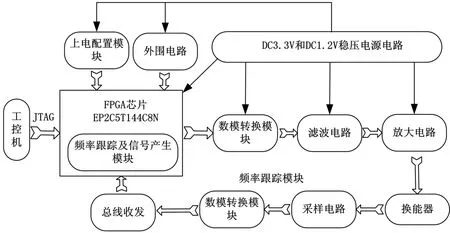
圖3 信號發生器及頻率跟蹤總體結構框圖
通過FPGA實現頂層控制模塊、DDS信號產生模塊、采樣信號處理模塊、數字鑒相器模塊。數字化信號發生器DDS原理如圖4所示,由相位累加器、加法器、波形存儲器、D/A數模轉化器與低通濾波器組成[6],通過輸入頻率控制字K控制輸出電功率信號的頻率。
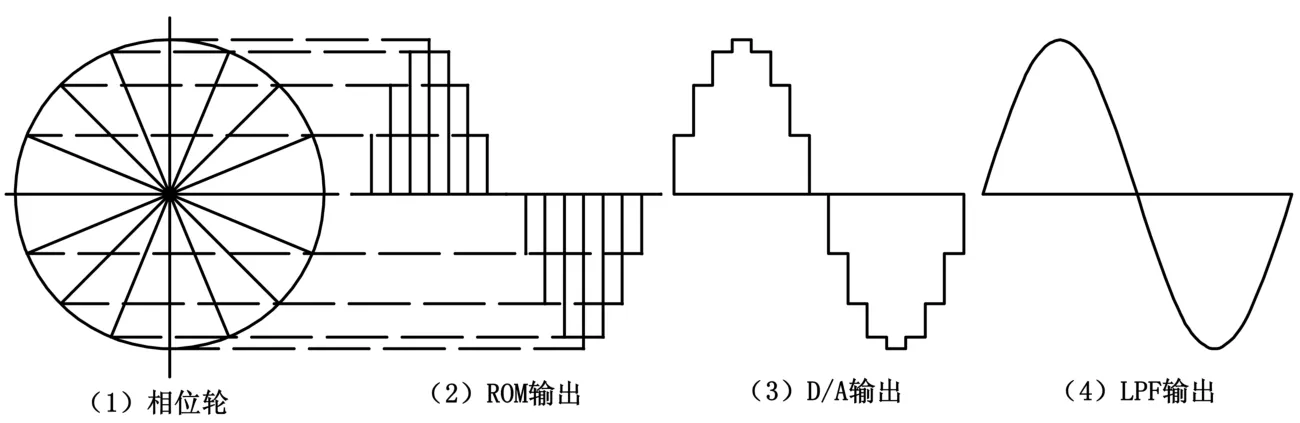
圖4 DDS波形合成示意圖
DDS的輸出信號經數模轉換和低通濾波器后得到一正弦波信號,再經放大電路和匹配電路處理,獲得所需頻率的電功率信號,驅動超聲換能器工作。本系統數模轉換采用的器件為AD557,該芯片內部集有精密基準電壓源和薄膜硅鉻電阻,薄膜硅鉻電阻在整個工作溫度范圍內可保證單調性工作所需的穩定性,使電壓在800 ns內達到±1/2 LSB精度。低通濾波器采用4階巴特沃斯低通濾波器,放大電路采用的器件為LF347N。
當激勵電功率信號的頻率偏移換能器的諧振頻率時,換能器兩端的電壓信號與電流信號則存在相位差,經采樣電路、模數轉換、總線收發器,將采樣值快速反饋給FPGA芯片,再通過數字化采樣處理模塊及鑒相器來調整頻率控制字K的數值,頻率控制字K控制DDS的輸出頻率,實現對相位差的補償,最終實現激勵信號的頻率時時跟蹤換能器的諧振頻率,保證換能器工作在最佳狀態。
3 頻率跟蹤系統硬件電路設計
超聲換能器頻率跟蹤的硬件電路必須能夠精確、快速地獲取換能器兩端的電壓和電流信號,并通過模數轉換及總線收發器反饋給FPGA芯片。頻率跟蹤的硬件電路具體包括:信號采樣電路、模數轉換電路、總線收發器電路。
(1)信號采樣電路
采樣電路包括電流采樣和電壓采樣。本文采用高頻脈沖電流互感器法,能夠真實地反映超聲振動換能器電流變化情況。檢測電路安裝在輸出端,采用耀華德昌公司生產的電流互感器TAK17-05,R18為采樣電阻560 Ω,工作頻率范圍是2 kHz~200 kHz,電流采樣電路如圖5所示。
電壓采樣采用電阻分壓法。用兩個無感電阻進行測量,R1= 400 kΩ/2W,R2為一個10 kΩ的可調電阻。
(2)模數轉換電路
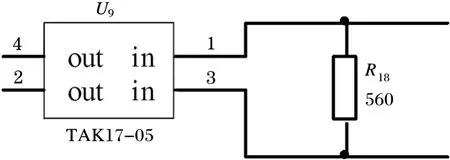
圖5 電流采樣電路
模數轉換電路如圖6所示,選用型號為DG408的8路復用器,配合模數轉換芯片AD573。8路復用器DG408的8號引腳為信號輸出端,1、15及16引腳為輸入信號選通控制引腳,其高、低電平由FPGA控制。模數轉換器件AD573采用先進的集成電路設計和處理技術,無需外部器件,執行10位全精度轉換的時間為20μs,可實現高速、高精度模數轉換。
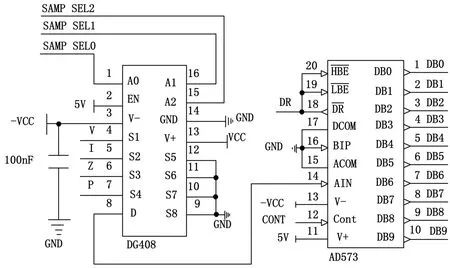
圖6 模數轉換電路
(3)FPGA總線收發電路
采樣信號與FPGA的通訊用并行傳送,提高傳輸速度,總線收發電路如圖7所示,選用總線收發器的器件型號為SN74LVCC3245,該芯片有兩個獨立供電電源軌,雙向電壓轉換,可實現數據從A總線到B總線或B總線到A總線的數字傳遞,傳遞方向取決于方向控制引腳DIR上的邏輯電平。本系統方向控制引腳接地,數據傳輸方向從B總線到A總線,即將采樣信號傳輸到FPGA芯片內部。
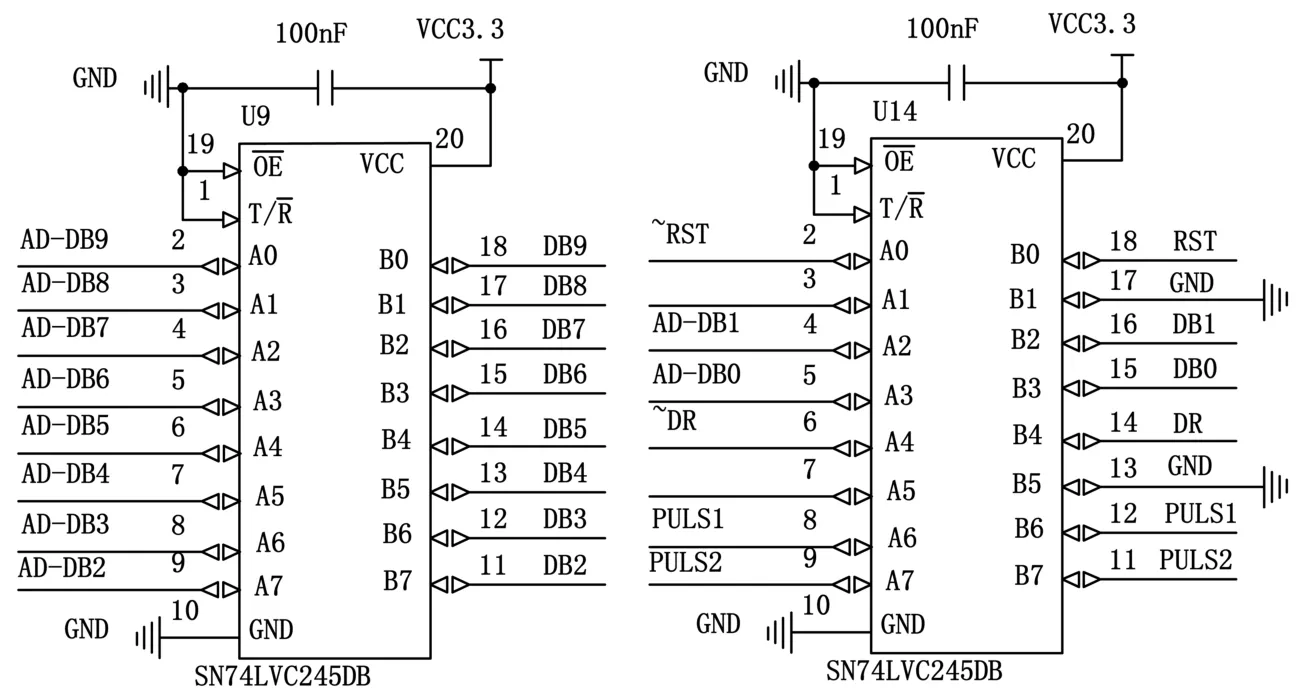
圖7 FPGA總線收發電路
4 數字鑒相器設計
基于FPGA的數字化頻率跟蹤流程圖如圖8所示,FPGA內部包括DDS模塊、采樣信號處理模塊、數字鑒相器模塊。DDS模塊將鑒相器輸出的相位差信號數字化,再根據鑒相器輸出的超前滯后信號,直接數字合成超聲換能器所需頻率的激勵信號。采樣信號處理模塊通過電壓和電流信號的零點判斷,獲取電壓與電流信號的相位差。數字鑒相器模塊根據反饋的相位差信號調整頻率控制字的值。
數字鑒相器模塊有四個輸入分別是系統時鐘clk,復位輸入rst_n,反饋信號輸入u1和u2;三個輸出信號,dn,dnup和up。使用Verilog HDL硬件描述語言描述上述功能后,用QuartusⅡ綜合后得到如圖9所示。
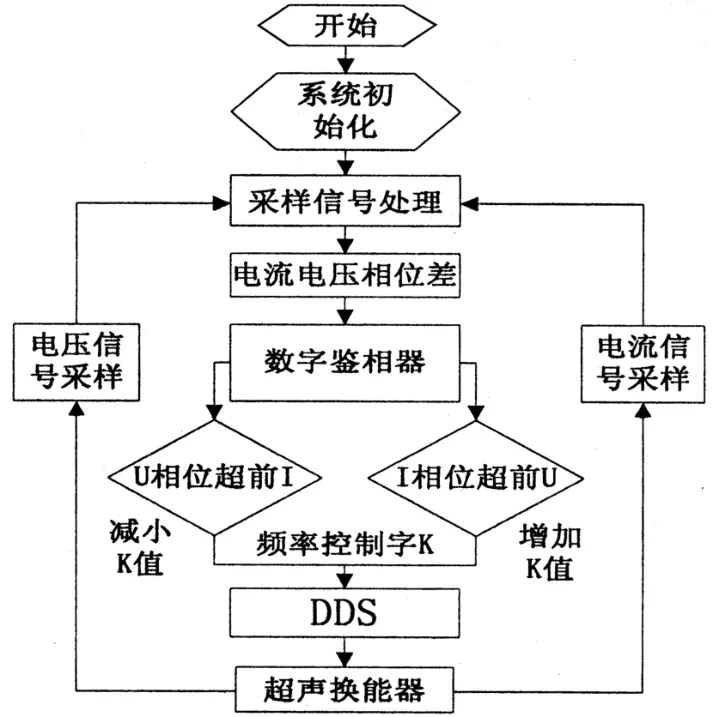
圖8 FPGA控制流程圖
當檢測到u1信號的上升沿的時候,使dn持續輸出低電平,然后判斷此時u2信號是否為低電平,如果為低電平,那么up輸出高電平;如果此時檢測到u2上升沿信號,或者u2正處于高電平狀態,up變為低電平。
當檢測到u2信號的上升沿的時候,使up持續輸出低電平,然后判斷此時u1信號是否為低電平,如果為低電平,那么dn輸出高電平;如果此時檢測到u1上升沿信號,或者u1正處于高電平狀態,dn變為低電平。
此數字鑒相器功能仿真圖如圖10所示。

圖9 數字鑒相器模塊
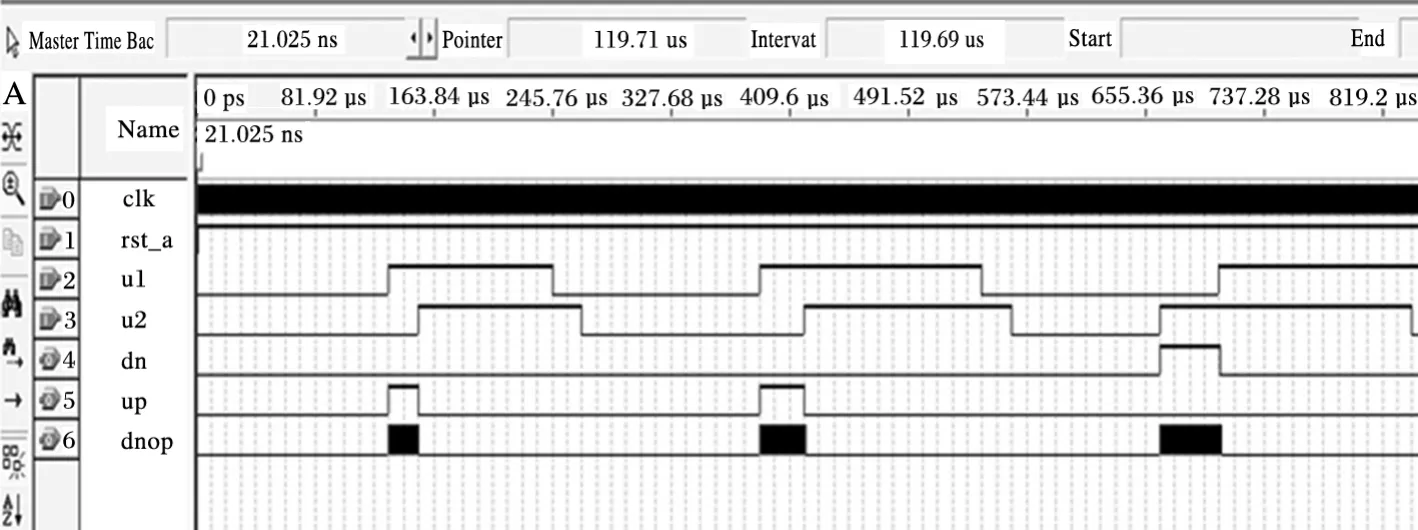
圖10 數字鑒相器功能仿真圖
5 頻率跟蹤實驗及結論
通過示波器測量換能器電壓電流信號如圖11所示,兩者的相位差在±10°,換能器處于良好的工作狀態。

圖11 電壓/電流跟蹤波形圖
實驗結果表明,該頻率跟蹤系統能夠自動調整超聲波發生器輸出的工作頻率,響應速度快,而且在較寬的頻率范圍內可以實時跟蹤由外界條件的變化所引起的換能器諧振頻率的變化,使得焊線機超聲換能器的工作頻率維持在諧振頻率附近一個很微小的范圍內波動,實現焊線機超聲引線鍵合的頻率自動跟蹤。
綜上,基于FPGA的電壓電流相位差反饋式頻率自動跟蹤系統可以快速、精確地在零相差點進行校正,無跟蹤頻率范圍限制,可以有效地應對換能器工作時頻率漂移,使換能器工作于諧振頻率附近,本方案是一種有效、可行的頻率跟蹤方案。
[1]Chiu S S,Chan H L W,Or S W,et al.Effect of electrode pattern on the out?puts of piezosensors for wire bonding process control[J].Materials Science and Engineering,2003,B99(12):121-126.
[2]武一民.引線鍵合系統設計理論與關鍵技術[D].天津:天津大學,2008.
[3]Kellogg R,Flatau A.Investigation of a Terfenol-D tun?able mechanical resonator[C].Proceedings of SPIE,2001(4327):550-559.
[4]Krimholtz R,Leedom D A,Matthaei G L.New equiva?lent circuits for elementary piezoelectric transducers[J].Electr.Lett,1970,6(13):398-399.
[5]戎強.基于DDS/FPGA的多波形信號源的研究[D].哈爾濱:哈爾濱工程大學,2008.
[6]張宏杰.熱超聲鍵合高頻換能系統設計與控制[D].天津:天津大學,2012.
Design of Wire Welding Machine Ultrasonic Generator Digital Frequency Tracking System
KE Chang-qiang
(College of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
In the process of wire welding machine ultrasonic wire bonding,the resonance frequency of the ultrasonic transducer is drifted due to factors such as temperature,pressure,environment change.The principle of impedance phase feedback tuning was expounded based on the analysis of electrical characteristics of ultrasonic transducer,and the digital frequency tracking system was designed based on FPGA.Compared with the traditional method,this tracking system has some advantages such as tracking system response speed,good real-time tracking,wide track frequency range and strong practicability.
ultrasonic generator;FPGA;frequency tracking;digital phase detector
TP751
:A
:1009-9492(2014)10-0001-05
10.3969/j.issn.1009-9492.2014.10.001
柯昌鏘,男,1987年生,福建三明人,碩士研究生。研究領域:運動控制及數字電路設計。
(編輯:阮 毅)
*廣東省戰略性新興產業專項資金LED產業項目(編號:2011A081301001、2012A080303004)
2014-04-16
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
