基于序貫算法的無(wú)偏最小二乘估計(jì)純方位目標(biāo)跟蹤
2014-02-27 07:04:04李亞安李曉花
水下無(wú)人系統(tǒng)學(xué)報(bào) 2014年1期
尚 進(jìn), 李亞安, 蔚 婧, 李曉花
?
基于序貫算法的無(wú)偏最小二乘估計(jì)純方位目標(biāo)跟蹤
尚 進(jìn), 李亞安, 蔚 婧, 李曉花
(西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安, 710072)
測(cè)量方程的非線(xiàn)性是純方位角跟蹤研究的難點(diǎn)。為了解決傳統(tǒng)偽線(xiàn)性估計(jì)結(jié)果存在嚴(yán)重有偏性這一問(wèn)題, 提出了一種基于偽線(xiàn)性估計(jì)的無(wú)偏估計(jì)方法, 即在偽線(xiàn)性方程中利用約束最小二乘估計(jì), 它不需要對(duì)初始值進(jìn)行假設(shè), 且收斂效果良好。采用序貫濾波方法對(duì)估計(jì)量作批處理濾波以減少運(yùn)算量, 提高了運(yùn)算效率。仿真結(jié)果表明, 利用該方法得到的估計(jì)量在高斯噪聲下能很好地逼近理想狀態(tài), 且收斂速度較快, 比擴(kuò)展卡爾曼濾波具有更好的跟蹤精度及收斂速度, 在目標(biāo)高速運(yùn)動(dòng)時(shí)仍能保持較好的跟蹤效果。
純方位; 偽線(xiàn)性估計(jì); 約束最小二乘; 序貫算法; 無(wú)偏估計(jì)
0 引言
純方位目標(biāo)跟蹤(bearing-only tracking, BOT)在過(guò)去幾十年中一直是研究的重點(diǎn)與難點(diǎn)[1-6]。BOT屬于典型的被動(dòng)跟蹤, 為目標(biāo)跟蹤領(lǐng)域的一個(gè)重要分支。它是在被動(dòng)測(cè)量的情況下, 僅僅利用目標(biāo)的方位信息, 估計(jì)目標(biāo)運(yùn)動(dòng)參數(shù)的過(guò)程。測(cè)量方程的非線(xiàn)性是純方位角跟蹤研究的重點(diǎn)與難點(diǎn)。Lindgern和Gong[1]提出偽線(xiàn)性估計(jì)(pseudo- linear estimation, PLE)來(lái)解決這一問(wèn)題, 然而加了噪聲的觀測(cè)量會(huì)出現(xiàn)在測(cè)量矩陣中, 從而導(dǎo)致嚴(yán)重的偏差[7]。
為克服偏差所帶來(lái)的影響, Aidala和Hammel提出了修正極坐標(biāo)的純方位目標(biāo)跟蹤[8], 結(jié)果顯示, 所估計(jì)的狀態(tài)向量在修正極坐標(biāo)下呈漸進(jìn)無(wú)偏。Passerieux[9]和Chan[7]利用輔助變量(ins- trumental variable, IV)算法, 理論上可以消除偏差, 然而關(guān)鍵的問(wèn)題是如何選取合適的輔助變量。另一種消除偏差的方法是最大似然估計(jì)(maximum likelihood estimator, MLE)[10]。此方法使用梯度搜索, 但是收斂效果取決于給定的初始條件和步長(zhǎng)的選取[2, 11]。經(jīng)典算法中, 廣泛應(yīng)用的是擴(kuò)展卡爾曼濾波(extended Kamlman filter, EKF)[12], 但可能存在協(xié)方差崩潰的現(xiàn)象, 且EKF對(duì)于初值十分敏感, 容易產(chǎn)生無(wú)法收斂的結(jié)果。
1 純方位目標(biāo)運(yùn)動(dòng)問(wèn)題描述

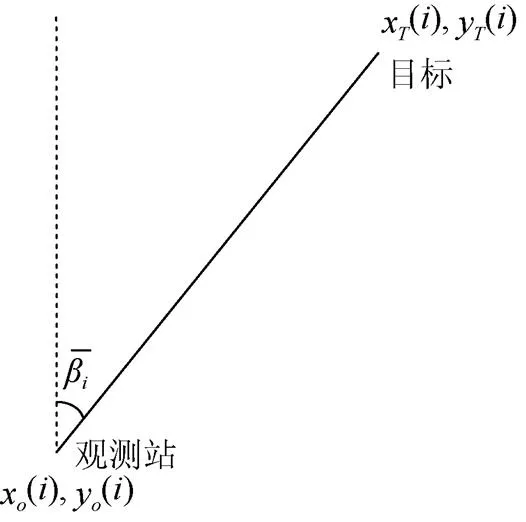
圖1 觀測(cè)角度, 觀測(cè)站及目標(biāo)位置示意圖
交叉相乘得



測(cè)量向量

測(cè)量矩陣


2 最小二乘無(wú)偏估計(jì)方法


把式(11)和式(12)帶入式(5),得


其中

首先, 定義一個(gè)增廣測(cè)量矩陣

和一個(gè)增廣解向量

則

其中

用拉格朗日乘數(shù)法可以解決約束條件最小化的問(wèn)題[2]。構(gòu)造輔助代價(jià)函數(shù)


3 序貫估計(jì)算法

由式(6), 式(7)和式(18)得




4 仿真結(jié)果與分析
4.1 假設(shè)觀測(cè)站和目標(biāo)均為潛艇

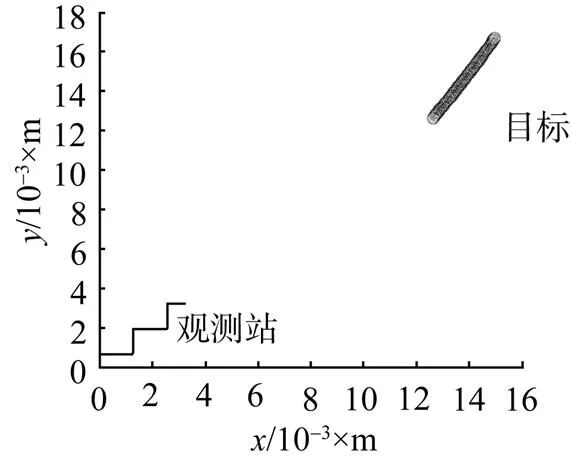
圖2 目標(biāo)與觀測(cè)站位置示意圖
Fig. 2 Schematic of positions of target and observer

圖3 觀測(cè)噪聲= 1°時(shí)潛艇-潛艇跟蹤軌跡示意圖
Fig. 3 Schematic of trajectory of a submarine tracking target submarine when observing noise=1°

圖4 s =1°時(shí)潛艇-潛艇位置估計(jì)均方根誤差

圖5 s =2°時(shí)潛艇-潛艇位置估計(jì)均方根誤差
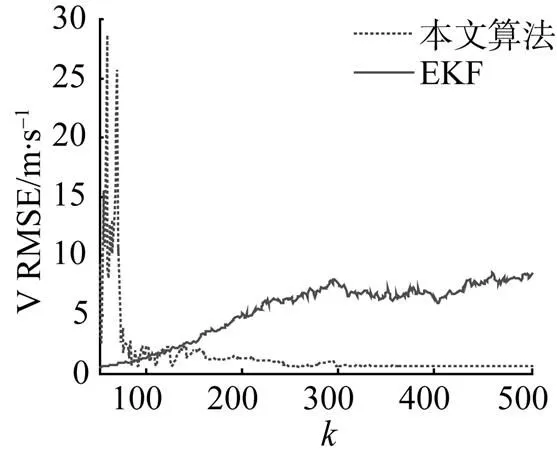
圖6 s =1°時(shí)潛艇-潛艇速度估計(jì)均方根誤差
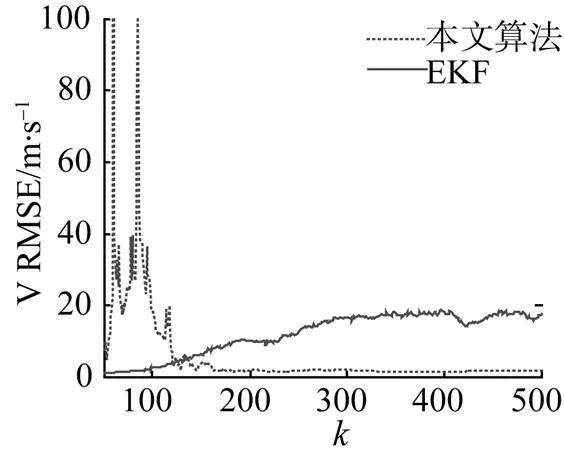
圖7 s=2°時(shí)潛艇-潛艇速度估計(jì)均方根誤差
4.2 假設(shè)觀測(cè)站為潛艇和目標(biāo)為高速運(yùn)動(dòng)魚(yú)雷

圖8 s =1°時(shí)潛艇-魚(yú)雷跟蹤軌跡
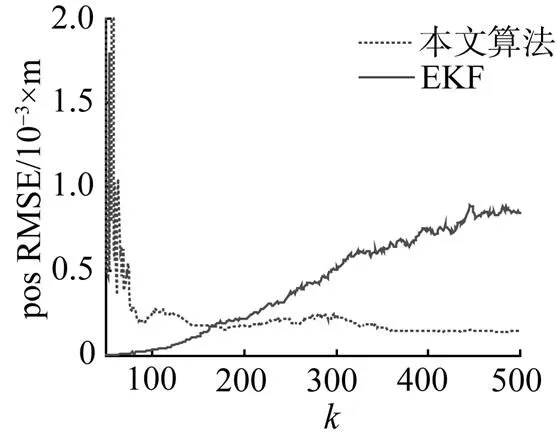
圖9 s =1°時(shí)潛艇-魚(yú)雷位置估計(jì)均方根誤差

圖10 s =2°時(shí)潛艇-魚(yú)雷位置估計(jì)均方根誤差
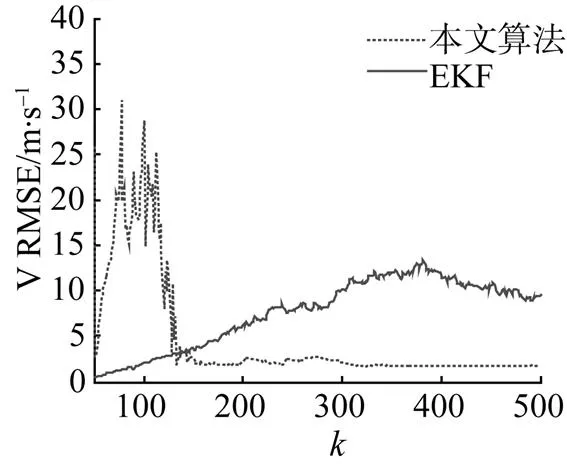
圖11 s =1°時(shí)潛艇-魚(yú)雷速度估計(jì)均方根誤差

圖12 s =2°時(shí)潛艇-魚(yú)雷速度估計(jì)均方根誤差
仿真中由于先以前50個(gè)采樣點(diǎn)作為一組數(shù)據(jù)得到初始化的值, 再進(jìn)行序貫估計(jì), 故得到初始值之前的前50個(gè)計(jì)算數(shù)值與誤差較大, 得到仿真初值后再濾波, 誤差則趨于穩(wěn)定。
5 結(jié)束語(yǔ)
本文對(duì)于勻速直線(xiàn)運(yùn)動(dòng)的目標(biāo)提出了一種無(wú)偏估計(jì)方法。此方法利用在約束條件下的最小二乘估計(jì)算法, 使得結(jié)果呈現(xiàn)無(wú)偏, 并且不需要假設(shè)初始值。當(dāng)有新的測(cè)量值時(shí), 序貫估計(jì)方法用來(lái)更新解向量。當(dāng)在開(kāi)始計(jì)算出一個(gè)解時(shí), 序貫算法不需要在隨后的每一步估計(jì)中再進(jìn)行廣義特征值分解, 這樣大大提高了計(jì)算的效率。與EKF 算法相比, 本文算法在位置和速度均方根誤差精度上, 都有很大的提高, 并且收斂速度更快, 對(duì)高速運(yùn)動(dòng)目標(biāo)的跟蹤仍有良好的可靠性。
[1] Lindgren A G, Gong K F. Position and Velocity Estimation via Bearing Observations[J]. IEEE Transactions on Aerospace and Electronic Systems, 1978, 14(4): 564-577.
[2] Ho K C, Chan Y T. An Asymptotically Unbiased Estimator for Bearings-Only and Doppler-Bearing Target Motion Analysis[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 809-821.
[3] 顧曉東, 袁智勇, 邱志明. 基于輔助變量法的雙基陣純方位目標(biāo)跟蹤算法[J]. 系統(tǒng)工程與電子技術(shù), 2010, 32(3): 508-511.
Gu Xiao-dong, Yuan Zhi-yong, Qiu Zhi-ming. Bistatic Bearing-only Target Tracking Algorithm Based on Instrumental Variable Method[J]. Systems Engineering and Electronics, 2010. 32(3): 508-511.
[4] 劉忠, 周豐, 石章松, 等. 純方位目標(biāo)運(yùn)動(dòng)分析[M]. 北京: 國(guó)防工業(yè)出版社, 2008.
[5] 郭云飛. 純方位角目標(biāo)跟蹤理論與應(yīng)用研究[D]. 浙江: 浙江大學(xué), 2007.
[6] Nardone S C, Aidala V J. Observability Criteria for Bearings-only Target Motion Analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 1981, 17(2): 162- 166.
[7] Chan Y T, Rudnicki S W. Bearings-only and Doppler-bearing Tracking Using Instrumental Variables[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(4): 1076- 1083.
[8] Hammel S E, Aidala V J. Utilization of Modified Polar Coordinates for Bearings-only Tracking[J]. IEEE Transactionson Automatic Control, 1983, 28(3): 283-294.
[9] Passerieux J M, Pillon D, Blanc-Benon P, et al. Target Motion Analysis with Bearings and Frequencies Measurements via Instrumental Variable Estimator[C]//IEEE International Conference on Acoustics, Speech and Signal Processing,1989, 2645-2648.
[10] Tao X J, Zou C R, He Z Y. Passive Target Tracking Using Maximum Likelihood Estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4):1348- 1354.
[11] Cadre J P, Le, Jauffret C. On the Convergence of Iterative Methods for Bearings-only Tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 801-818.
[12] Aidala V J. Kalman Filter Behavior in Bearings-only Tracking Applications[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(1): 29-39.
(責(zé)任編輯: 楊力軍)
Unbiased Least Square Estimation for Bearings-Only Target Tracking Based on Sequential Algorthm
SHANG JinLI Ya-anYU JingLI Xiao-hua
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
Bearings-only target tracking attempts to obtain a target trajectory only based on bearings measurements. This problem is difficult because the measurement equations are nonlinearly related to the target parameters. The pseudolinear estimation provides a linearized measurements equation, however the estimation result is severely biased. In order to deal with this problem, this paper proposes an unbiased estimation method with good convergence property, in which constraint least squares minimization is applied to the pseudolinear estimation without assuming initial values. The sequential filtering algorithm is employed for batch processing of the estimator, thus the estimation accuracy is improved and the computation is reduced. Simulation result shows that the proposed algorithm gets higher tracking accuracy and faster convergence speed than the extended Kalman filter, the obtained estimator approaches the perfect state in the condition of Gaussian noise rapidly and keeps steady when the target is moving at a high speed.
bearings-only; pseudolinear estimation; constraint least squares; sequential algorithm; unbiased estimation
TJ630.34
A
1673-1948(2014)01-0020-06
2013-06-06;
2013-09-01.
國(guó)家自然科學(xué)基金(51179157).
尚 進(jìn)(1989-), 男, 在讀碩士, 主要研究方向?yàn)樗履繕?biāo)跟蹤.
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
