漂浮式風(fēng)電機(jī)組的載荷優(yōu)化控制及其先進(jìn)監(jiān)測(cè)技術(shù)研究
2014-03-07 02:24:16李盛善
中國(guó)測(cè)試 2014年6期
趙 麟,李盛善,朱 斌,王 磊
(電子科技大學(xué)能源科學(xué)與工程學(xué)院,四川 成都 611731)
漂浮式風(fēng)電機(jī)組的載荷優(yōu)化控制及其先進(jìn)監(jiān)測(cè)技術(shù)研究
趙 麟,李盛善,朱 斌,王 磊
(電子科技大學(xué)能源科學(xué)與工程學(xué)院,四川 成都 611731)
針對(duì)大型漂浮式海上風(fēng)力發(fā)電機(jī)組運(yùn)行過(guò)程中葉根處存在有較大的載荷和平臺(tái)搖動(dòng)等問(wèn)題,根據(jù)現(xiàn)有的漂浮式平臺(tái)模型、獨(dú)立變槳控制算法和控制策略,在輸出功率穩(wěn)定的情況下,在PI協(xié)同變槳的控制基礎(chǔ)加上,采用葉根處的載荷控制信號(hào)和平臺(tái)搖動(dòng)角度的控制信號(hào)的方法來(lái)實(shí)現(xiàn)風(fēng)力發(fā)電機(jī)組的優(yōu)化控制。為驗(yàn)證控制器的可行性,通過(guò)美國(guó)可再生能源實(shí)驗(yàn)室的FAST和MCrunch軟件進(jìn)行仿真,將結(jié)果與統(tǒng)一變槳的結(jié)果進(jìn)行對(duì)比后,采用先進(jìn)監(jiān)測(cè)與控制方法有效性,可為今后開(kāi)展樣機(jī)控制器的測(cè)試提供一種思路。
海上風(fēng)力發(fā)電;漂浮式;獨(dú)立變槳;載荷優(yōu)化;單神經(jīng)元自適應(yīng)PI控制器;監(jiān)測(cè)
0 引 言
隨著風(fēng)電技術(shù)逐漸由陸上延伸到海上,海上風(fēng)電在未來(lái)的風(fēng)電產(chǎn)業(yè)中將占據(jù)越來(lái)越重要的地位;但由于近海風(fēng)電場(chǎng)址資源所剩有限,且強(qiáng)風(fēng)往往出現(xiàn)在離岸較遠(yuǎn)的深海,因此歐美國(guó)家正在積極開(kāi)展深海風(fēng)電技術(shù)的研究。隨著海水深度增加,定樁支撐結(jié)構(gòu)的海上風(fēng)電場(chǎng)建設(shè)成本急劇上升,這就將此研究限定在了近海風(fēng)場(chǎng),使得漂浮式風(fēng)力發(fā)電技術(shù)[1]成為解決這一問(wèn)題的有效途徑。
變槳控制策略總體上可分為“基于數(shù)學(xué)模型的控制方法”和“智能控制方法”兩大類。考慮到風(fēng)電系統(tǒng)的不確定性 (包括動(dòng)力學(xué)載荷的不確定性以及電力電子模型的復(fù)雜性),風(fēng)電機(jī)組是一個(gè)多變量非線性快變系統(tǒng)。文獻(xiàn)[2]提出使用基于神經(jīng)元PID的風(fēng)力發(fā)電機(jī)組獨(dú)立變槳控制,在載荷優(yōu)化方面取得了比較好的效果。文獻(xiàn)[3]采用卡爾曼濾波和LQG控制算法,通過(guò)雨流法同時(shí)應(yīng)用Palmgren-Miner規(guī)則,分析比較了協(xié)同變槳和獨(dú)立變槳的疲勞載荷。文獻(xiàn)[4]提出使用狀態(tài)空間控制器在高于額定風(fēng)速區(qū)間提高功率輸出質(zhì)量和減少漂浮式平臺(tái)移動(dòng)。
目前大多數(shù)控制方法難以兼顧實(shí)時(shí)、自適應(yīng)、魯棒性等要求;因此,本文提出使用改進(jìn)的單神經(jīng)元自適應(yīng)PI控制器,通過(guò)獨(dú)立變槳控制方法實(shí)現(xiàn)葉根載荷和平臺(tái)搖動(dòng)最小的效果。
1 深海漂浮式風(fēng)力發(fā)電機(jī)組模型
海上風(fēng)場(chǎng)具有高風(fēng)速、低風(fēng)切變、低湍流和高產(chǎn)出等優(yōu)點(diǎn),海上風(fēng)力發(fā)電機(jī)組與陸上最大的區(qū)別是基礎(chǔ)平臺(tái),因此在設(shè)計(jì)海上風(fēng)力發(fā)電控制系統(tǒng)設(shè)計(jì)除了考慮風(fēng)況外,還需要考慮海況。如圖1,風(fēng)電機(jī)組建模需要考慮轉(zhuǎn)子、驅(qū)動(dòng)鏈、發(fā)電機(jī)、機(jī)艙、塔架和平臺(tái)的運(yùn)動(dòng)耦合,文獻(xiàn)[5]分析了漂浮式平臺(tái)的耦合關(guān)系,海上平臺(tái)需要增加艏搖、縱搖、橫搖、縱蕩、垂蕩和橫蕩等6個(gè)自由度。

圖1 漂浮式海上風(fēng)力發(fā)電機(jī)組模型
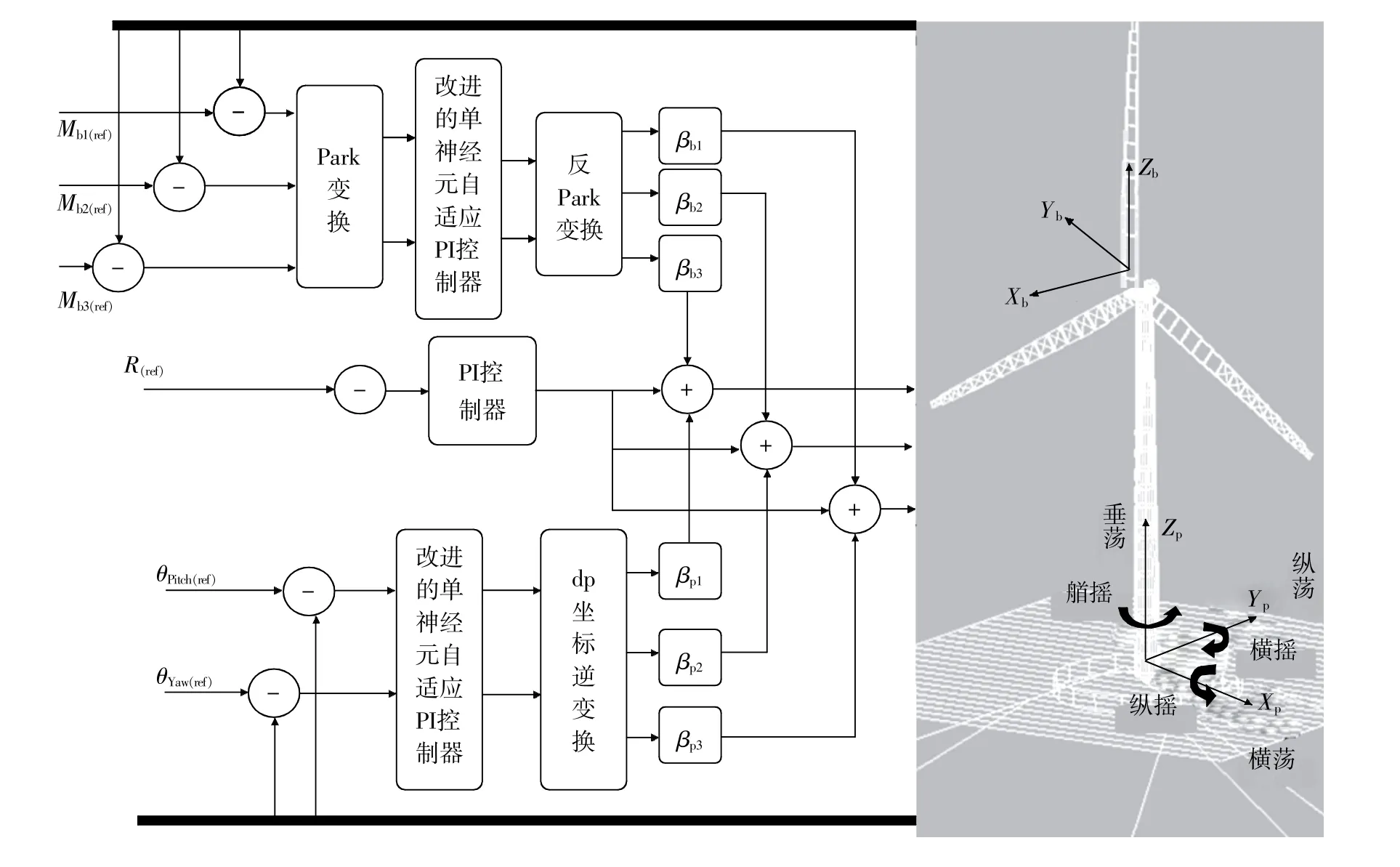
圖2 獨(dú)立變槳控制框圖
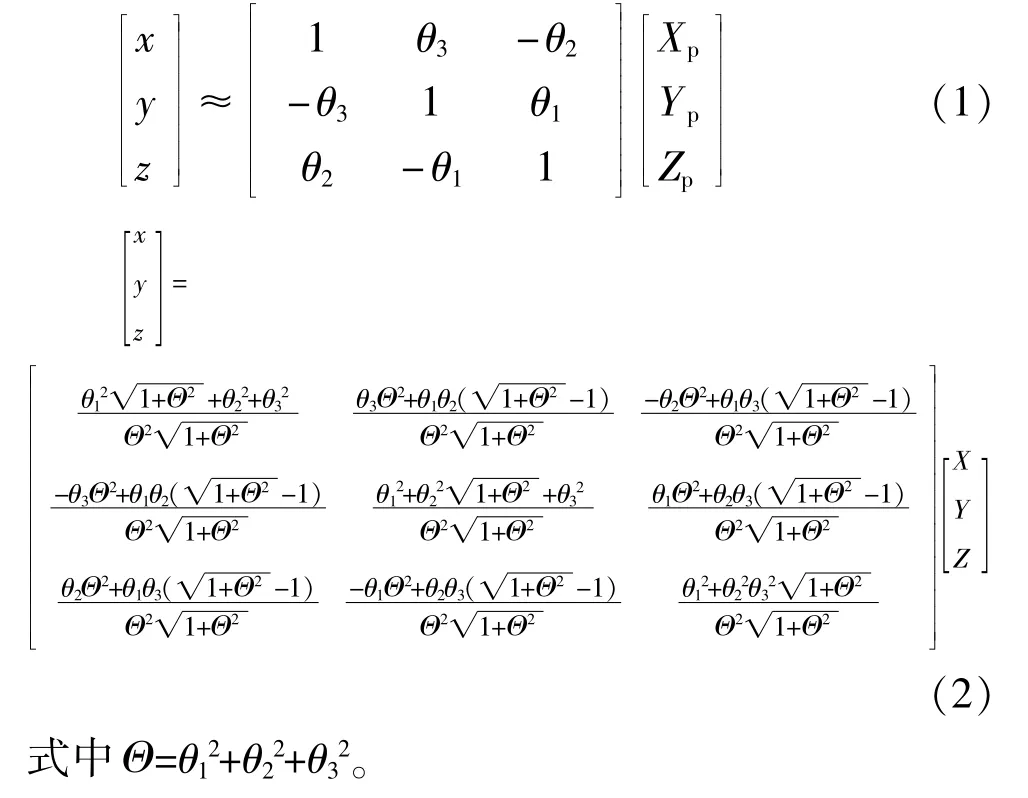
漂浮式平臺(tái)的坐標(biāo)系見(jiàn)圖2,(Xp,Yp)表示水平面,海上風(fēng)力發(fā)電機(jī)組平臺(tái)的轉(zhuǎn)動(dòng)角度不會(huì)太大,因?yàn)榻嵌冗^(guò)大將使系統(tǒng)不穩(wěn)定。因此在使用FAST軟件仿真的時(shí)候,假設(shè)平臺(tái)旋轉(zhuǎn)的角度較小,通過(guò)加入正交旋轉(zhuǎn)的(θ1,θ2,θ3)實(shí)現(xiàn)從(Xp,Yp,Zp)到(x,y,z)的坐標(biāo)變換,得到兩個(gè)坐標(biāo)系的歐拉角變換,如式(1)所示。但是得到的坐標(biāo)系不是正交的,這樣無(wú)疑會(huì)影響動(dòng)態(tài)響應(yīng)的準(zhǔn)確性,需要根據(jù)矩陣?yán)碚撝R(shí)進(jìn)行修正,得到式(2)。
2 獨(dú)立變槳控制模型
風(fēng)速可分解為垂直方向和水平方向的速度,當(dāng)風(fēng)速通過(guò)三葉片水平軸風(fēng)力機(jī)的時(shí)候,風(fēng)速在風(fēng)輪掃描面上不均勻分布,將造成葉片上的速度矢量三角形不相等,使風(fēng)輪在旋轉(zhuǎn)過(guò)程中受到的氣動(dòng)力中心處于變動(dòng)狀態(tài),從而使風(fēng)輪造成交變的載荷。為了減小葉根處的載荷,把葉根載荷信號(hào)(My1,My2,My3)引入到變槳控制中,通過(guò)將各個(gè)葉根載荷經(jīng)Park變換和濾波,作為改進(jìn)的單神經(jīng)元自適應(yīng)PI控制器的輸入信號(hào),輸出的控制信號(hào)經(jīng)過(guò)反Park變換和協(xié)同變槳控制器輸出信號(hào)相加,從而實(shí)現(xiàn)獨(dú)立變槳減小葉根載荷[6-9]。葉根坐標(biāo)系見(jiàn)圖2,其中Park變換和反Park變換可表示為

其中θ表示葉片方位角。
對(duì)于漂浮式平臺(tái)的海上風(fēng)力發(fā)電機(jī)組,獨(dú)立變槳控制除了減小葉根處的載荷,還應(yīng)該考慮平臺(tái)搖動(dòng)的控制,當(dāng)風(fēng)場(chǎng)的風(fēng)速超過(guò)額定風(fēng)速的時(shí)候,為了實(shí)現(xiàn)輸出功率穩(wěn)定,需要調(diào)節(jié)槳距角來(lái)減小風(fēng)能的吸收,當(dāng)進(jìn)行采用協(xié)同變槳控制的時(shí)候,漂浮式平臺(tái)有一個(gè)向前的傾斜力,為了使風(fēng)機(jī)不偏離中心位置,可通過(guò)減小槳距角提供恢復(fù)力,但是這種控制方法對(duì)于輸出的電能質(zhì)量有影響。采用獨(dú)立變槳時(shí),每個(gè)槳距角可以根據(jù)控制目標(biāo)獨(dú)立調(diào)節(jié),這樣可以在協(xié)同變槳的控制基礎(chǔ)上增加一個(gè)不對(duì)稱的空氣力矩,從而減小了浮式平臺(tái)縱搖角度,并保證了輸出功率的穩(wěn)定。分別通過(guò)對(duì)采集艏搖和縱搖的角度值采用改進(jìn)的單神經(jīng)元自適應(yīng)PI控制器進(jìn)行控制,控制器的輸出通過(guò)反Park變換將根據(jù)槳葉的位置分配到每個(gè)槳葉上。獨(dú)立變槳的控制結(jié)構(gòu)如圖2所示。
3 變槳控制器的設(shè)計(jì)
3.1 控制目標(biāo)
風(fēng)力發(fā)電機(jī)組的控制主要分為在額定風(fēng)速下實(shí)現(xiàn)最大功率跟蹤(MPPT)和在額定風(fēng)速上實(shí)現(xiàn)功率輸出穩(wěn)定,包含了控制的兩個(gè)主要內(nèi)容,分別是跟蹤和整定,本文研究的是漂浮式海上風(fēng)力發(fā)電機(jī)組在額定風(fēng)速的功率整定。主要的控制目標(biāo)為:
1)通過(guò)統(tǒng)一變槳實(shí)現(xiàn)輸出功率穩(wěn)定。
2)通過(guò)葉根處的載荷信號(hào)和平臺(tái)搖動(dòng)信號(hào),實(shí)現(xiàn)獨(dú)立變槳控制算法,使葉根處的載荷和平臺(tái)搖動(dòng)減小。
3.2 設(shè)計(jì)改進(jìn)的單神經(jīng)元自適應(yīng)PID控制器
在協(xié)同變槳的控制基礎(chǔ)上增加浮式平臺(tái)的搖動(dòng)信號(hào),通過(guò)專家PID控制算法實(shí)現(xiàn)獨(dú)立變槳控制[10-13]。專家PID控制算法是智能控制的一個(gè)分支,不需要知道控制對(duì)象的精確數(shù)學(xué)模型,能夠克服控制器的非線性,但是很難兼顧自適應(yīng)性和魯棒性,并且PID的控制參數(shù)整定需要一定的時(shí)間。本文采用改進(jìn)單神經(jīng)元自適應(yīng)PID控制器,為解決強(qiáng)非線性、強(qiáng)耦合的漂浮式海上風(fēng)電機(jī)組的獨(dú)立變槳控制問(wèn)題開(kāi)辟了新途徑。
改進(jìn)的單神經(jīng)元自適應(yīng)PI控制器,具有結(jié)構(gòu)簡(jiǎn)單、自適應(yīng)能力和自組織能力強(qiáng)的特點(diǎn),算法描述如下:
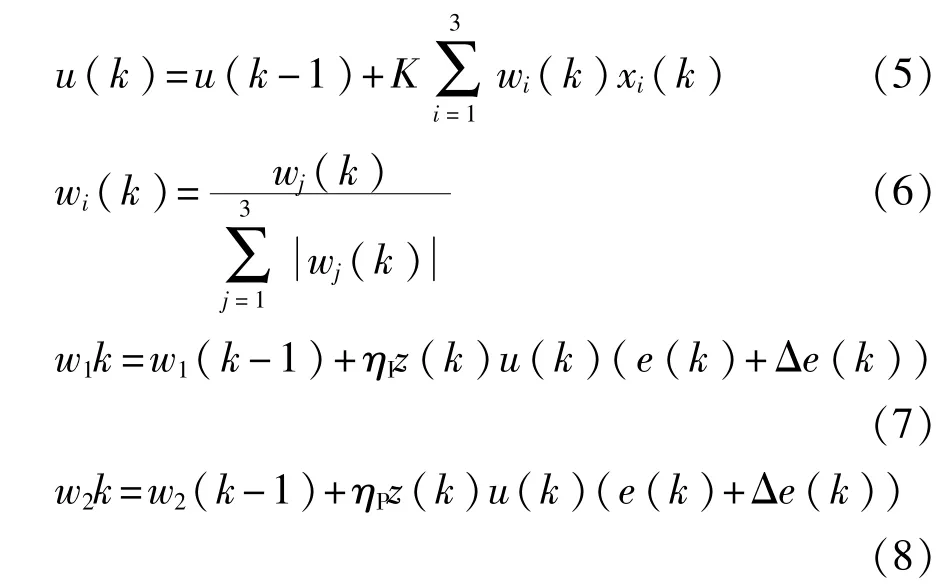

式中x3(k)=e(k)-2e(k-1)+e(k-2),z(k)=e(k),x1(k)=e(k),x2(k)=e(k)-e(k-1),K為神經(jīng)元的比例系數(shù),ηP,ηI,ηD分別為比例、積分和微分的學(xué)習(xí)速率。
4 測(cè)試系統(tǒng)
采用傳感器網(wǎng)絡(luò)對(duì)風(fēng)電機(jī)組運(yùn)行狀況參數(shù)進(jìn)行采集,通過(guò)無(wú)線通信方式構(gòu)建風(fēng)電場(chǎng)的通信系統(tǒng),遠(yuǎn)程傳輸給上位機(jī),上位機(jī)對(duì)采集參數(shù)包括數(shù)據(jù)顯示、數(shù)據(jù)存儲(chǔ)、故障診斷和報(bào)警進(jìn)行分析和處理。
5 仿真模型與仿真結(jié)果分析
5.1 仿真工具和模型
算法的驗(yàn)證采用可再生能源實(shí)驗(yàn)室的FAST、Turbsim、Mcrunch軟件和Matlab/Simulink聯(lián)合仿真,F(xiàn)AST軟件提供了Matlab/Simulink接口,從而簡(jiǎn)化了控制算法的實(shí)現(xiàn)和參數(shù)的整定。采用NREL開(kāi)發(fā)的漂浮式海上風(fēng)力發(fā)電機(jī)組模型[14-16],通過(guò)修改槳距控制子程序?qū)崿F(xiàn)風(fēng)電機(jī)組的載荷優(yōu)化,模型詳細(xì)參數(shù)如表1所示。

表1 NREL 5MW海上風(fēng)力機(jī)參數(shù)
5.2 仿真結(jié)果分析
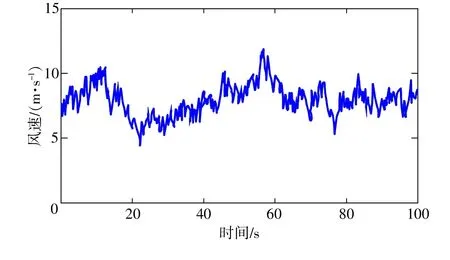
圖3 風(fēng)速圖
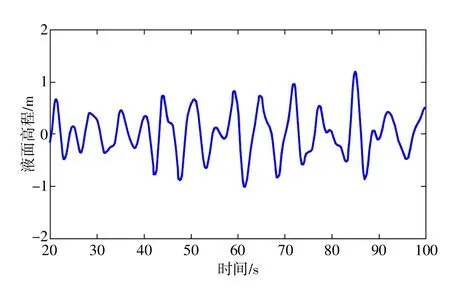
圖4 波面高程

圖5 槳距角
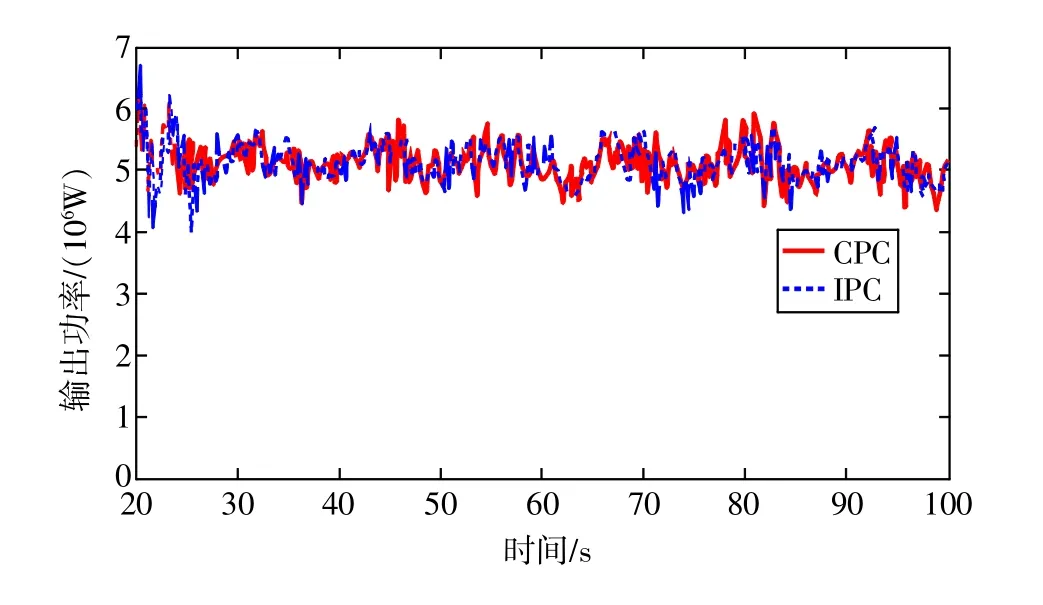
圖6 輸出功率
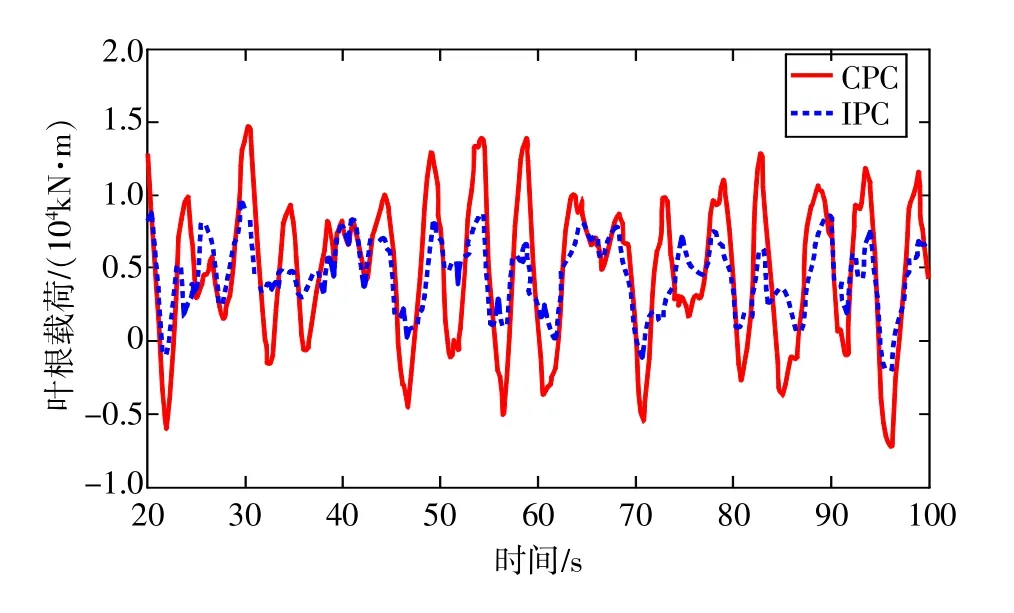
圖7 葉根載荷
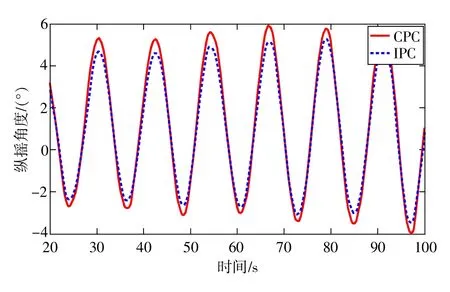
圖8 縱搖角度

圖9 艏搖角度
為了更好地評(píng)價(jià)改進(jìn)的單神經(jīng)元自適應(yīng)獨(dú)立變槳控制器在葉根處的載荷和平臺(tái)搖動(dòng)方面的性能,通過(guò)在葉根處載荷、輸出功率、縱搖角度和艏搖角度與統(tǒng)一變槳進(jìn)行比較。控制算法驗(yàn)證的海況和風(fēng)況條件如圖3、圖4所示,加入獨(dú)立變槳控制器后,協(xié)同變槳和獨(dú)立變槳的槳距角變化如圖5所示。從圖6~圖9得出,在相同外部條件下,改進(jìn)的單神經(jīng)元自適應(yīng)獨(dú)立變槳控制器在葉根載荷、平臺(tái)搖動(dòng)方面控制的性能得到了極大的提高。
6 結(jié)束語(yǔ)
在漂浮式平臺(tái)上比較兩種變槳控制器,分別是采用PI控制的協(xié)同變槳控制器和改進(jìn)單神經(jīng)元的PI控制的獨(dú)立變槳控制器,葉根處的載荷和平臺(tái)搖動(dòng)的角度通過(guò)坐標(biāo)變換作為獨(dú)立變槳控制信號(hào),實(shí)現(xiàn)獨(dú)立變槳控制算法,從而減小葉根處的載荷和平臺(tái)的搖動(dòng),使輸出功率平穩(wěn)。仿真模型采用NREL開(kāi)發(fā)的5MW漂浮式風(fēng)力發(fā)電模型,在Matlab/Simulink實(shí)現(xiàn)協(xié)同變槳和獨(dú)立變槳控制算法,通過(guò)MCrunch軟件進(jìn)行處理分析,結(jié)果表明葉根處的載荷和平臺(tái)的搖動(dòng)得到了有效的控制。證明文中所提出的先進(jìn)監(jiān)控方法可為今后漂浮式風(fēng)電機(jī)組主動(dòng)安全控制器設(shè)計(jì)提供借鑒。
[1]World wind energy report 2012[R].World Wind Energy Association WWEA,2013.
[2]應(yīng)有,許國(guó)東.大型風(fēng)電機(jī)組獨(dú)立變槳控制技術(shù)研究[J].太陽(yáng)能學(xué)報(bào),2011,32(6):891-896.
[3]高汝英.大型風(fēng)力發(fā)電機(jī)組獨(dú)立變槳距控制[D].天津:天津大學(xué),2009.
[4]邢作霞,陳雷.獨(dú)立變槳距控制策略研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2011,31(26):131-138.
[5]鄭宇.基于神經(jīng)元PID的風(fēng)力發(fā)電機(jī)組獨(dú)立變槳控制[J].水電能源科學(xué),2012,30(2):151-154.
[6]Guo H C,Lu X P.Research on pitch control of floating offshore wind turbines [C]∥Fuzzy Systems and Knowledge Discovery (FSKD),2012 9th International Conference on.IEEE,2012:2966-2970.
[7]Camblong H,Nourdine S,Vechiu I,et al.Comparison of an island wind turbine collective and individual pitch LQG controllers designed to alleviate fatigue loads[J]. Renewable Power Generation,2012,6(4):267-275.
[8]Laesen T J,Hanson T D.A method to avoid negative damped low frequent tower vibrations forafloating, pitch controlled wind turbine[C]∥Journal of Physics: Conference Series.IOP Publishing,2007,75(1):012073.
[9]Van E T.Control design based on aero-hydro-servoelastic linear models from TURBU(ECN)[C]∥Proceeding of the European Wind Energy Conference.Milan,2007.
[10]Bossanyi E A.Wind turbine control for load reduction[J]. Wind Energy,2003,6(3):229-244.
[11]Stol K A.Dynamics modeling and periodic control of horizontal-axis wind turbine[M].University of Colorado,2001:72-80.
[12]Stol K,Zhao W,Wright A D.Individual blade pitch control for the controls advanced research turbine[J]. Journal of Solar Energy Engineering,Transactions of the ASME,2006,128(4):498.
[13]Jonkman J M.Dynamics modeling and loads analysis of offshore floating wind turbine[R].Golden, Colorado:National Renewable Energy Laboratory,2007.
[14]Jonkman J.Fast theory manual[R].NREL/TP-500-32449. Golden,CO:National Renewable Energy Laboratory,2009.
[15]Jonkman B J.Turbsim user's guide:Version 1.50[M]. Colorado:National RenewableEnergy Laboratory,2009:35-43.
[16]Buhl M.MCrunch theory manual for version 1.00[R]. NREL/TP-500.Golden,CO:NationalRenewable Energy Laboratory,2009.
Study of floating wind turbine load optimization control and advanced monitoring
ZHAO Lin,LI Sheng-shan,ZHU Bin,WANG Lei
(School of Energy Science and Engineering,University of Electronic Science and Technology,Chengdu 611731,China)
For large floating offshore wind turbine blade root exists larger load and platform shaking and other issues during operation,according to the existing floating platform model,independent pitch control algorithms and control strategies,in the output power stability case,by the PI control based collaborative plus pitch at the blade root load control signal and platform rocking angle control signal to achieve optimal control of wind turbines,which the blade root floating platform load control and displacement control signal and the input signal were obtained through an improved single neuron adaptive PI controller and the coordinate transform.In order to verify the feasibility of the controller,by the FAST,MCrunch software simulation in the U.S.Energy Laboratory,comparing the results with uniform pitch,the results show that under the stability of the output power circumstances,the method presented is effective which can show a new idea to test controller of prototype.
offshore wind turbine;floating;individual blade pitch;load optimization;single neuron adaptive PI controller;monitoring
TM762;TM611;TM391.9;TP274
:A
:1674-5124(2014)06-0108-05
10.11857/j.issn.1674-5124.2014.06.028
2014-02-15;
:2014-04-07
趙 麟(1983-),女,四川攀枝花市人,助理工程師,碩士,主要從事能源方面的工作。