變頻技術在舞臺吊桿定位控制中的應用
2014-03-08 09:22:17李青朋毛海杰龔建興
自動化與儀表 2014年11期
李 煒,李青朋,毛海杰 ,龔建興
(1.蘭州理工大學 電氣工程與信息工程學院,蘭州 730050;2.甘肅工大舞臺技術工程有限公司,蘭州 730050)
吊桿是劇場內重要的舞臺設備之一,它具有提升道具、布景和燈具等功能[1]。實際演出過程中,經常需要快速啟停,由于存在運動慣性和機械延時等各方面因素的影響,傳統的勻速控制策略往往很難滿足其高精度定位運行的要求。針對上述問題,本文結合PLC、變頻二分法調速算法技術及增量式編碼器反饋技術以實現速度和位置檢測的雙閉環控制。該方法具有調速平穩,調速范圍寬,對機械沖擊低,電動機維護量大大降低等優點,使吊桿系統最大程度地實現零速制動,減少了定位誤差以實現設備停靠精確的目標,并極大地改善了系統的安全可靠性能及運行平穩性能。
1 舞臺吊桿控制系統簡述
目前,我國舞臺機械控制系統主要包括臺上吊桿子系統和臺面升降臺子系統2大模塊,且常采用“上位機+可編程控制器(PLC)+變頻器+交流電機”的運動控制模式[2],其舞臺吊桿控制系統的示意圖如圖1所示。
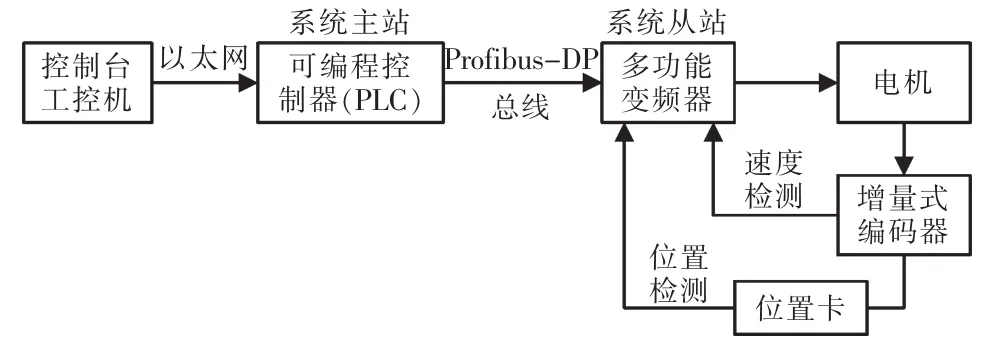
圖1 舞臺吊桿控制系統結構圖Fig.1 Block diagram of stage boom control system
其中,主機采用工控機作為上位機對系統實現監控和管理,并通過以太網與核心控制器PLC進行通信,為發送運行位置和運行速度等參數信息提供了保障;S7-400 PLC通過Profibus-DP總線與NORD 700E系列變頻器通訊,從而帶動電機驅動吊桿運動;編碼器的輸出信號送入變頻器集成的位置卡中,通過脈沖記數實現位置和速度的反饋,構成雙閉環控制系統。
1.1 雙閉環控制策略
本文采用變頻調速的雙閉環控制策略,其結構如圖2所示。此策略要求對速度和位置進行綜合調節,通過雙閉環系統可使每道吊桿實現無級調速和自動定位。
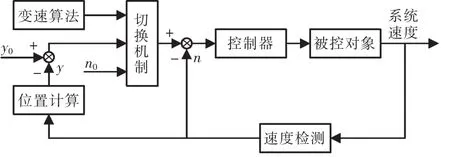
圖2 雙閉環控制結構圖Fig.2 Block diagram of double closed loop control
圖中,被控對象由變頻器和交流電機組成,控制器集成于變頻器中以提升速度快速跟蹤性能;切換機制和變速算法由PLC編程實現,當超過設定的減速距離后會切換至變速算法曲線以實現速度平穩下降,減少機械沖擊造成的定位不精確問題,從而保證了減速及制動過程的平穩及準確,其相應的控制過程分析如下:
1)用戶通過工控機給出預設位置、預設速度和預設減速開始制動距離,利用增量式編碼器進行速度檢測以實現速度的閉環控制,同時將脈沖數通過位置計算來確定運行的實際距離,并與預設位置相比較,形成位置的閉環控制。系統啟動過程中,通過PI速度跟蹤控制器對速度進行穩定和快速跟蹤預定速度值,而位置計算值僅作為判斷減速制動時機的依據。
2)當接近預設位置(即達到預設減速制動距離)時,位置反饋起主要作用。即變頻器會通過PProfibus-DP總線將脈沖信息傳輸至PLC,進而通過位置計算得到實際位置,同時PLC根據預設位置值與實際位置值的差值和預設減速制動距離進行比較,當達到預設減速制動距離范圍內時,立即執行PLC中的變速算法來確定要給出的速度值以實現速度均勻降低,最終以最低速度平穩勻速運行,一旦計算檢測到電機已經運行到預定位置誤差范圍內時,會給出抱閘信號迅速制動,從而達到精確定位的要求。
1.2 變速算法的實現
針對傳統勻速控制方案中存在吊桿定位誤差大、零速停靠不易實現等缺點,目前通常采用三段式、五段式及七段式速度控制模型以提升系統運行的平穩可靠性[3-5],但上述控制模型中的關鍵參數(如最大運行速度以及加速段、減速段的加速度等)因受各種因素影響而很難確定到最佳狀態,且運算復雜及PLC編程不易實現等,因此該方案的實現在某種程度上具有局限性。針對上述問題,本文在給定判斷吊桿減速制動距離的基礎上,提出了式(1)、式(2)所示的舞臺吊桿二分法減速算法,該算法便于集成至PLC中,使控制系統運行更加平穩,定位精確可靠,且方法簡單,易于工程實現。

式中,n(t)的表達式如式(2)所示

其中:n0、y0、ys為預設給定速度、預設位置和預設減速開始制動距離;N(t)為最終送入變頻器的速度運行值。當吊桿運行的相對位置(y0-y,y為吊桿運行的實際距離)未達到減速制動范圍時,吊桿以設定速度n0快速運行;達到時,按照對相對位置進行二分法并在相應的循環掃描周期內計算減速速度值(即為 PLC 循環掃描周期),并以此速度減速運行,一旦速度低于由PLC設定的最低速度ns時,以最低速度勻速運行。
2 舞臺控制系統軟件設計
舞臺機械控制系統軟件設計主要由上位監控軟件設計和下位PLC控制程序設計2部分組成。上位機用于發送吊桿設備的操作數據運行信息及實時監測、顯示吊桿位置、速度信息等;下位PLC控制程序用以實現吊桿設備復雜的邏輯關系,使其達到基本動作的目標。
2.1 上位監控軟件設計
上位監控軟件采用高級語言VB6.0進行程序開發設計,程序結構實行模塊化設計,包括系統配置、設備控制、設備監控等模塊。為實現吊桿運行參數信息的實時傳輸,故而將OPC客戶端集成于上位機中,并采用OPC客戶端/服務器模式通信,通過以太網與下位PLC進行數據傳輸。其中,系統配置查看所有舞臺設備,并設置相應的限位狀態、用戶參數信息及OPC配置文件等,該功能完成與下位PLC正常的OPC通信、設置不同的登錄訪問權限及舞臺設備基本的管理信息以實現下位的安全運行,為下位PLC執行相應的信息提供了保障;設備控制實現控制設備的上升/下降、左移/右移、定速/定位等運行狀態,并向下位發送舞臺設備的速度、位置等運行參數信息,是PLC控制設備運行的基礎條件;設備監控實現實時顯示舞臺設備的運動狀況及實際狀態信息等,其上位軟件體系結構如圖3所示。
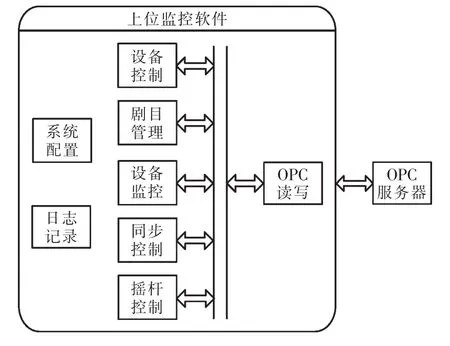
圖3 上位軟件體系結構圖Fig.3 Block diagram of upper software systems
2.2 下位PLC控制程序設計
舞臺機械控制系統的下位PLC控制程序采用西門子Step7 V5.4編程工具、梯形圖編程語言方法進行編程。其中,舞臺臺上吊桿模塊的運行流程圖如圖4所示。
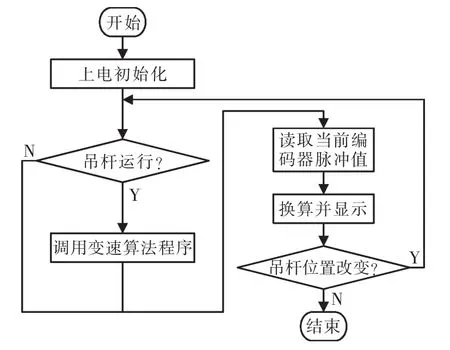
圖4 吊桿運行流程圖Fig.4 Program flow chart of boom operation
圖中,變速算法為PLC編程的核心部分,當有吊桿運行參數后,系統會調用如圖5所示的變速算法子程序進行速度計算,通過Profibus-DP總線控制變頻器實現電機變速控制,并利用增量式編碼器的脈沖數進行位置換算,計算出吊桿的當前位置,并通過以太網顯示到上位機中實現實時監控的目的。

圖5 變速算法子程序流程圖Fig.5 Program flow chart of variable speed algorithm
3 結語
本文提出的舞臺調速吊桿變頻調速的雙閉環控制策略已在甘肅大劇院、武威大劇院等多家劇場應用中驗證了其可行性,通過變速算法實現吊桿零速制動,解決了吊桿運行過程中的運動慣性和機械延時等影響定位精度的問題,很大程度上提高了吊桿系統的定位控制精度。
[1] 段慧文.舞臺機械的安全性、可靠性與安全防護裝置[J].演藝設備與科技,2006,18(6):46-50.
[2] 劉長榮.我國舞臺機械運動控制系統的模式及特色[J].演藝科技,2012,66(1):1-6.
[3] 趙慶國,胡心科.變速算法在舞臺吊桿控制中的應用[J].工業儀表與自動化裝置,2012(5):43-45.
[4] 楊杰.舞臺吊桿同步平滑起吊的控制研究[D].太原:太原科技大學,2013:15-28.
[5] 蔣偉,胡高平,劉妍.舞臺吊桿七段式速度控制策略探討[J].現代電子技術,2006,29(5):73-75.
[6] 廖常初.PLC編程及應用[M].北京:機械工業出版社,2005.
[7] 鄭亞紅.圖解PLC梯形圖[M].沈陽:遼寧科學技術出版社,2013.■
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:47:32
鳳凰動漫(軍事大王)(2022年1期)2022-04-19 11:35:30
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2017年7期)2017-06-05 09:36:13
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
好孩子畫報(2014年6期)2014-07-25 03:20:04
