基于改進自適應閾值法的指針儀表圖像預處理
2014-03-08 03:47:48方彥軍
自動化與儀表 2014年9期
孫 勇 ,肖 勇 ,方彥軍
(1.武漢大學 自動化系,武漢 430072;2.廣東電網公司電力科學研究院,廣州 510080)
目前在我國的工業生產領域,指針式儀表由于結構相對簡單、抗電磁干擾強、性價比高等優點,仍在大量使用。同時,隨著機器視覺與數字圖像處理技術的發展,基于機器視覺的指針式儀表自動讀數系統的研究也受到廣泛關注[1-3]。系統主要完成特征值提取和讀數識別,先通過預處理技術初步篩選出刻度線、指針中心點,再識別出儀表示值。
圖像預處理在自動讀數系統中具有非常關鍵的作用,預處理效果直接影響到后續的識別精度。指針儀表圖像預處理主要包含濾波去噪、圖像增強和圖像二值化,文獻[4]對圖像預處理技術進行了論述與研究,并提出了改進的同態濾波法技術,文獻[5]采用動態閾值分割算法及改進的自適應中值濾波來實現預處理目的,文獻[6]采用人工確定閾值的方法使灰度圖二值化。由于并沒有一種通用的圖像分割算法適用于所有圖像,相關研究[7-9]在圖像預處理環節大多采用特定的方法。本文針對自動讀數系統采集到的指針儀表圖像,結合生產工作實踐,提出一種改進的圖像預處理方法,即在圖像銳化濾波、直方圖均衡化的基礎上利用自適應閾值法進行圖像二值化,相比全局閾值法、直接自適應閾值法,該方法能夠有效地突出指針儀表圖像的特征,取得較好的輪廓提取效果。
1 系統硬件平臺
自動識別系統主要可分為工作臺及后臺計算機。工作臺是識別系統和被檢指針表的接口,包含圖像傳感器、輔助光源、可調節支撐架及壓力接口4部分。工作臺一是通過壓力接口實現儀表的安裝和標準壓力源的導入,二是通過圖像采集裝置實現指針儀表圖像數據的采集與傳輸。后臺計算機主要完成采集圖像的處理,實現指針儀表圖像的讀數。
系統硬件平臺構成如圖1所示,系統工作時,先由圖像采集卡采集圖像,再進入計算機進行圖像處理,計算機根據處理結果進行判斷,發出指令控制云臺和攝像頭動作,也可控制程控電源實現儀表的相對移動,通過兩種方式調整攝像頭和指針儀表的相對位置,從而實現圖像的優質采集。指針儀表圖像采集后,通過圖像預處理、找圓心、確定半徑、提取刻度、確定刻度值、識別讀數等幾個步驟實現儀表讀數的識別。指針式儀表圖像的預處理是圖像輸入到計算機后進行的第一步操作,對后續的指針提取、刻度提取和自動讀數起關鍵作用。
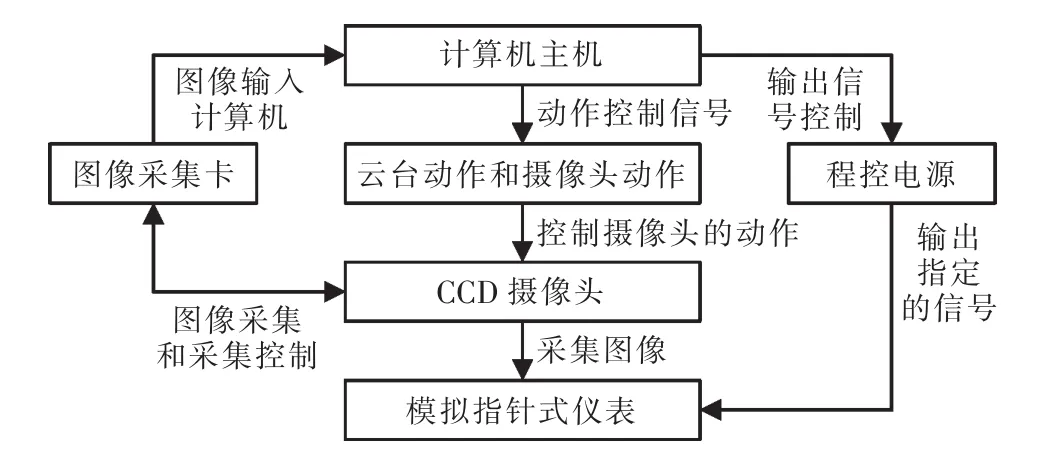
圖1 系統硬件結構框圖Fig.1 Structure diagram of automatic verification system
2 預處理操作
圖像采集卡由于周圍環境影響或是硬件條件的限制,采集到的圖像都會存在干擾噪聲,所以首先需要對指針儀表圖像進行預處理。一是濾除噪聲信號,避免其對特征信息的干擾,二是圖像增強,突出有用信息。預處理實驗在Matlab R2011b平臺上進行,根據濾波去噪和圖像增強理論,結合實際編程處理的可操作性,整個處理過程如下:先用加權平均值法進行圖像灰度化處理,再根據直方圖特點進行圖像濾波與增強操作,為后續的二值化處理打下基礎。
2.1 圖像濾波
指針儀表圖像在獲取和傳輸過程中,受外界環境條件以及自身器件的影響會產生大量噪聲,這些噪聲會干擾甚至是掩蓋圖像的特征信息。空間域濾波法和頻率域濾波法是常用的兩類圖像降噪濾波技術。空間域濾波法直接在空間中操作處理圖像各像素的灰度值。頻率域濾波法需要先利用傅里葉變換把圖像變換到頻率域,然后濾波處理圖像的頻域變換值,最后再將濾波后的頻譜逆變換回空間域。在實際應用中并不是所有的圖像都適合傅立葉變換,其往往對圖像的大小有所限制,所以采用的相對較少。
空間濾波常用的有均值濾波器和中值濾波器。均值濾波器就是對鄰域內所有像素點取平均值得到復原圖像的亮度值。令Sxy表示中心在(x,y)點,尺寸為m×n的矩形子圖像窗口的坐標組。(x,y)點處復原圖像的值為

均值濾波簡單的平滑了一副圖像的局部變化,減少了噪聲的同時模糊了圖像。中值濾波對鄰域像素點進行排序并取中間值為復原圖像亮度值:

Shyam等人提出了一種改進的均值濾波法,首先對噪聲點進行檢測再計算均值[10]。Taisheng等人將這兩種濾波方法綜合提出一種自適應濾波方法[11]。
頻域是由傅里葉變換和頻域變量(u,v)定義的空間,設H(u,v)是濾波器函數,且輸出圖像的傅里葉變換為 G(u,v),則有:

常用的頻域濾波器有低通濾波器、高通濾波器和巴特沃斯濾波器等,但并不是所有的圖像都存在傅里葉變換,所以頻域濾波有一定的限制,本文采用中值濾波去除椒鹽噪聲。
2.2 直方圖均衡化
直方圖反應了圖像的灰度分布情況,是多種空間域處理技術的基礎。直方圖修正是指增加圖像像素值直方圖分布來對圖像進行增強處理,經過直方圖修正后,圖像像素值在各個級別上都有分布,像素值間的差距拉大,更容易表現圖像細節。直方圖均衡化是把已知灰度概率分布的圖像,經過一種變換,使之演變成一幅具有均勻灰度概率分布的新圖像,經過直方圖均勻化處理的圖像,其圖像灰度級出現的相對概率相同,此時圖像的熵最大,圖像包含的信息量也最大,一般能夠增強圖像細節。
灰度級為[0,L-1]范圍的數字圖像直方圖是離散函數 h(rk)=nk,其中 rk是第 k 級灰度,nk是圖像中灰度級為rk的像素個數。灰度級為rk的概率估計值為P(rk)=nk/n,其中n為像素總數。設灰度級r歸一化到[0,1],考慮式(4)的連續變換函數,其中 s為變換后灰度值:

滿足下列條件:①T(r)在區間[0,1]為單值且單調遞增;②函數值域滿足 0≤T(r)≤1,0≤r≤1。
令 Pr(r)和 Ps(s)分別代表隨機變量 r和 s 概率密度函數,由基本的概率理論,若T-1(s)滿足條件(1),則:

當變換函數為

由萊布尼茨準則:

將式(7)代入式(5)中可得到:

由此可知經變換函數(6)得到均勻概率密度函數。對于離散值,用概率和求和代替上述變換中的概率密度函數和積分,可以得到式(6)的離散形式:

上式的映射即為直方圖均衡化。直方圖均衡化可以使圖像灰度級覆蓋整個灰度域,擴展了其動態范圍,具有較高的對比度。由于灰度值是離散的,直方圖均衡化之后輸出直方圖也不可能在所有灰度級上概率相等。圖2為直方圖均衡化處理前后的對比。
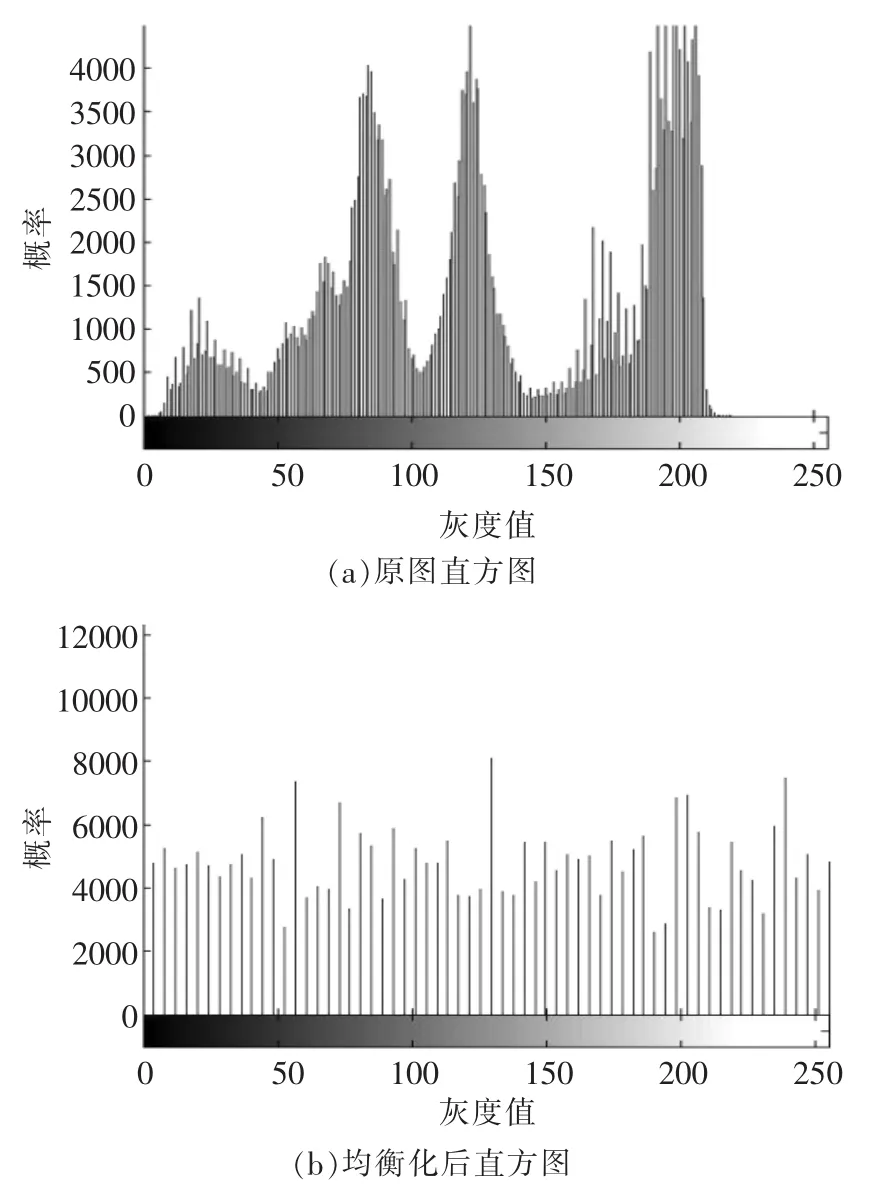
圖2 直方圖均衡化對比圖Fig.2 Comparison of histogram equalization
3 圖像二值化
圖像濾波與直方圖均衡化處理增強了儀表圖像的細節特征,下一步處理為圖像二值化。指針和刻度線反映指針儀表圖像主要特征,在提取這些信息之前,需對圖像進行分割,得到包含特征信息的二值圖像。圖像分割算法主要分為兩大類:利用區域內象素灰度相似性的基于區域的算法和利用區域間灰度不連續性的基于邊緣的算法。基于邊緣的圖像分割法包括點線檢測和各種邊緣檢測算子。
3.1 二值化算法
域值分割是最常用和古老的分割方法之一,其基本原理可用以下表達式說明:

其中: f(x,y)為原圖像;g(x,y)為處理后圖像;T 為閾值。根據T是否固定可分為單閾值法和自適應閾值法,自適應閾值法的T根據圖像各部分差異會相應的變化。閾值的選取如果只和點的灰度值有關,則稱為點相關的全局閾值法。全局閾值法是操作起來最簡單的方法,一般通過實驗迭代法、雙峰法、Otsu[12]法等方法實現。如果與點的灰度值和局部鄰域特性有關,則稱為局部閾值法。它是圖像的部分區域使用同一個閾值,主要有Niblack算法、Bernsen算法、Kamel-Zhao算法等。閾值的選取如果與點的位置、灰度值、領域特征相關,則稱為自適應閾值法,自適應閾值法對于局部有更加規范和量化的規定,主要有共生矩陣法、Bruckstein算法等。
用Otsu法進行圖像二值化的基本思路是:選取的最佳閾值應當使得用該閾值分割得到的兩類間具有最好的分離性;類間分離性最好的判據是統計意義上的類間特性差最大或類內特性差最小[13]。
圖像的灰度級在[0,L-1]范圍內,若最佳閾值為 t,則按閾值將圖像劃分為 C0={0,1,…,t}和 C1={t+1,t+2,…,L-1},每個灰度級的概率為

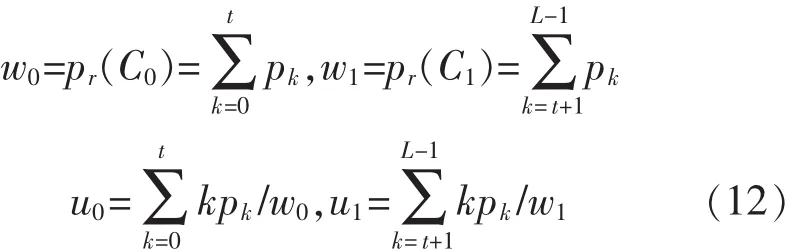
C0和C1的類間為

使該方差最大的t即為所求,方差反映的是一個變量對應一組數值的均衡性大小,方差越大說明其均衡性越低。
自適應閾值法的閾值不是一成不變的,而是根據鄰域的灰度分布情況按照一定的規律變化。一種基于積分圖像的閾值法思路為:定義輸入圖像為f(x,y),積分圖像用 I(x,y)表示。 對于積分圖像上任意一點 I(x0,y0),其含義是區域{(x,y)|0≤x≤x0,0≤y≤y0}內所有像素點的灰度值之和。假定1≤x,1≤y則有:
I(x,y)=f(x,y)+I(x,y-1)+I(x-1,y)-I(x-1,y-1)(14)
若 x=0 則忽略 I(x-1,y),若 y=0 忽略 I(x,y-1)。得到積分圖像后,可以很方便地計算出區域{(x,y)|x1<x<x2,y1<y<y2,}內所有像素點的灰度值之和,可以提高計算效率。
再取邊長為s的正方形為移動窗口,窗口在原圖像上移動,如果中心點位置像素點的灰度值低于窗口區域灰度平均值t%時,該點為黑點,反之為白點。若像素點處于邊界位置,則取移動窗口和圖像交集區域計算其灰度平均值。利用積分法對圖像分割能夠很好地消除由于照度不勻導致亮度分布不均的干擾[14]。指針儀表圖像在獲取過程中,由于表盤邊緣遮蓋的緣故,在刻度線附近會出現陰影,所以更適合采用自適應閾值法。圖3對比了采用Otsu算法和基于積分圖像的自適應閾值法二值化結果,后者效果明顯優于前者。
3.2 二值化處理分析
預處理實驗在Matlab R2011b平臺上進行,根據3.1節的討論,先將獲得的彩色圖像進行灰度化處理,對于處理結果分別進行Otsu法、自適應閾值法和本文提出的改進自適應閾值法二值化。本文提出的方法為對灰度化后的圖像去噪濾波和直方圖均衡化,再進行圖像求反與增強對比度操作,最終使用自適應閾值法二值化。
由于光照的不均勻,選取的600×480的樣本1刻度45-55區域處于暗區域、刻度15-20區域儀表鏡面有反光現象。通過實驗可以看出,直接用全局閾值法二值化結果如圖3(a)所示,可見處理結果導致大部分刻度線丟失,為下一步完成讀數識別造成很大阻礙。采用自適應閾值法的處理結果如圖3(b)所示,相比全局閾值法,自適應閾值法處理結果有較大改善,但是在刻度15-20區域部分信息也有所丟失,同時每個刻度線都有所縮短,不利于進一步的刻度提取與讀數識別。本文提出的改進自適應閾值法處理結果如圖3(c)所示,可見二值化圖像刻度15-20區域信息保留較好,其余刻度線特征突出,這為讀數識別打下很好基礎。圖3(d)為本文方法處理結果與自適應閾值法處理結果的減影對比圖,可以看出,本文處理方法能夠保留樣本圖像更大特征。
為了驗證本文提出方法的有效性,選取精度等級更高的指針儀表圖像樣本2進行對比分析實驗。處理過程與樣本1相同,圖4(a)為自適應閾值法處理結果,圖4(b)為本文提出方法的處理結果,可以看出,本文提出的方法對比效果更為明顯,刻度線保存更為完整,刻度線與指針信息丟失量較少。
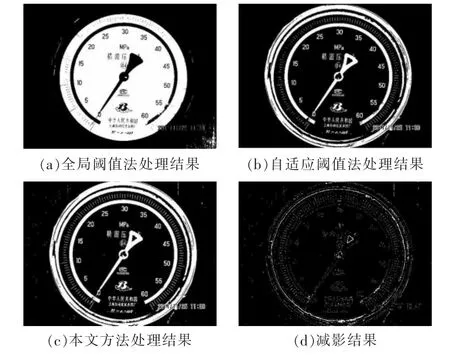
圖3 樣本1試驗結果Fig.3 Test result of sample 1
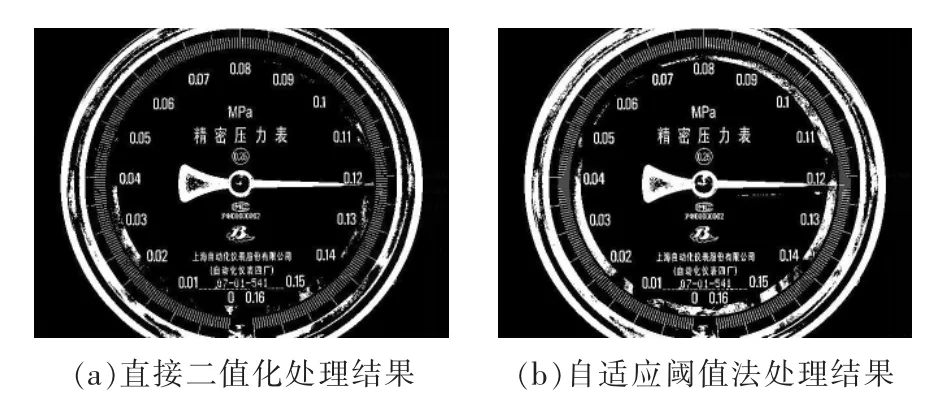
圖4 樣本2試驗結果Fig.4 Test result of sample 2
4 結語
對機器視覺指針式儀表圖像預處理技術的研究,表明全局閾值法不適合此類圖像的二值化。本文根據儀表盤圖像特點,提出改進的自適應閾值法,采取濾波去噪、直方圖均衡化、增強對比度等操作,再進行自適應閾值法進行圖像二值化。實驗表明,此方法能夠克服光照不均勻、鏡面反光等影響因素,放大圖像細節特征,有效消除噪聲,為后續讀數識別打下基礎。
[1] 熊偉麗,周寰,徐保國.指針式壓力表自動檢定系統的設計與實現[J],傳感器與微系統,2009,28(8):105-107.
[2] F Correa Alegria,A Cruz Serra.Automatic calibration of analog and digital measuring instruments using computer vision[J].IEEE Transactions on Instrumentation and Measurement,2000,49 (1):94-99.
[3] 陳世偉,李世平,管京周,等.指針式電壓表精度自動化檢定系統的設計與實現[J].計算機測量與控制,2005,13(11):1192-1194.
[4] 郭貴法.指針儀表圖像預處理技術研究[D].廣州:廣東工業大學,2010.
[5] 陶冰潔,韓佳樂,李恩.一種實用的指針式儀表讀數識別方法[J].光電工程,2011,38(4):145-150.
[6] 張紹兵.基于神經網絡數字識別方法的研究[J].計算機測量與控制,2008,16(12):1994-1995.
[7] 戴海港,宮寧生,郇洪江.基于圖像處理技術的高精度儀表的自動判讀[J].化工自動化及儀表,2010,37(8):131-132.
[8] 范江濤,汪仁煌,周武,等.基于數字圖像處理技術的針式儀表讀數識別[J].廣東工業大學學報,2007,27(4):76-78.
[9] 季厭浮,張紹兵.無指針式儀表表盤數字識別方法的研究[J].自動化儀表,2008,29(12):25-27,32.
[10]Shyam Lal,Sanjeev Kumar,Mahesh Chandra.Removal of high density salt and pepper noise through super mean filter for natural images[J].International Journal of Computer Science Issues,2012,9(3):303-309.
[11]Taisheng Li,Xuan Zhang,Chongrong Li.An Improved adaptive image filter for edge and detail information preservation[C]//Systems and Informatics,ICSAI 2012 International Conference,2012:1875-1878.
[12]N Otsu,A threshold selection method from gray-level histogram[J].IEEE Trans.Systems Man and Cybernet,1979,9(1):62-66.
[13]王磊,段會川.Otsu方法在多閾值圖像分割中的應用[J].計算機工程與設計,2008,29(11):2844-2845,2972.
[14]Derek Bradley,Gerhard Roth.Adaptive thresholding using the integral image[J].Journal of Graphics Tools,2007,12(2):13-21.
2014控制工程師峰會將于11月3日在上海召開
2014年11月3日,2014控制工程師峰會(Control Engineers’Summit,簡稱CES)即將在上海大華錦繡假日酒店舉辦。在繼承2013年CES峰會的“推開控制之門,匯聚創新智慧”精髓外,今年將會一如既往的為工控人士呈現饕餮大餐,并加強同行經驗交流與分享。
自首屆 “控制工程師峰會”2012年上海成功舉辦以來,CES峰會已經成為以自動化工業用戶為導向的中國工控自動化領域年度重要盛會,旨在進一步研究和探討中國目前工業自動化行業的市場機遇與創新趨勢、存在的問題以及應采取的戰略措施,以提升自動化視野、促進垂直行業自動化應用技術交流為根本目的。
“控制工程師峰會”由新加坡騰世傳媒集團下的《亞洲控制工程》雜志社主辦,每年舉辦一次,主要面向中國工業自動化領域的控制工程師讀者、業內專家和分析人士。通過年度控制工程師主題論壇、自動化技術及行業應用,工廠自動化與過程自動化兩大分論壇以及現場展示、在線研討會等系列活動,對年度重要的自動化市場新動向、商務形勢、自動化新技術等進行探討和交流。