基于多信息融合的磨機(jī)負(fù)荷動(dòng)態(tài)尋優(yōu)控制
2014-03-08 05:46:08賀曉巧王建民
自動(dòng)化與儀表 2014年5期
賀曉巧,王建民,趙 曄
(河北聯(lián)合大學(xué) 電氣工程學(xué)院,唐山 063000)
球磨機(jī)是選礦廠的主要設(shè)備,并且磨礦工序在整個(gè)選礦過程中具有重要的地位。磨礦過程是一個(gè)多變量、非線性、強(qiáng)耦合、時(shí)變性和純延遲大慣性的復(fù)雜控制對(duì)象,所以采用常規(guī)PID控制的球磨機(jī)系統(tǒng)難以達(dá)到理想的控制效果[1]。目前我國在對(duì)球磨機(jī)的控制方面,大部分還處于憑借工人經(jīng)驗(yàn)手動(dòng)進(jìn)行調(diào)節(jié)的方式,不能達(dá)到安全穩(wěn)定且高效運(yùn)行要求。此外,磨礦過程耗電量極大,人工經(jīng)驗(yàn)控制不利于提高工廠的經(jīng)濟(jì)效益[2]。因此,研發(fā)了基于多信息融合的磨機(jī)負(fù)荷專家控制系統(tǒng)。對(duì)磨機(jī)特性進(jìn)行深入了解并對(duì)現(xiàn)場(chǎng)數(shù)據(jù)進(jìn)行分析后,采用變步長(zhǎng)動(dòng)態(tài)尋優(yōu)與模糊PID相結(jié)合的算法,并借鑒多信息融合技術(shù)對(duì)磨機(jī)負(fù)荷進(jìn)行控制。
1 磨礦過程工藝流程與磨機(jī)動(dòng)態(tài)特性
1.1 磨礦過程工藝流程
磨礦過程由多個(gè)設(shè)備共同協(xié)調(diào)完成,其工藝流程描述如下:原礦經(jīng)過破碎后從給礦倉給礦至調(diào)速計(jì)量皮帶機(jī),再經(jīng)過喂料皮帶機(jī)給礦至球磨機(jī),在給礦的同時(shí),通過加球機(jī)和加水管自動(dòng)完成鋼球和水的添加。新的給礦和分級(jí)機(jī)的返砂(粗料)經(jīng)球磨機(jī)研磨后再經(jīng)螺旋分級(jí)機(jī)進(jìn)行篩選分級(jí),對(duì)不合格的礦石(粗料)進(jìn)行返砂再磨,合格的部分(細(xì)料)進(jìn)入磁選工序。
1.2 磨機(jī)工作特性
磨礦系統(tǒng)是一個(gè)具有大慣性、時(shí)變性和純滯后的調(diào)節(jié)對(duì)象,動(dòng)態(tài)特性非常復(fù)雜[2]。對(duì)于球磨機(jī)內(nèi)存料量與球磨機(jī)的功率、磨音、出力的關(guān)系[3],可以得出以下幾點(diǎn)結(jié)論:
(1)球磨機(jī)的功率與磨機(jī)內(nèi)存料量并不是簡(jiǎn)單的一次關(guān)系,而是存在極值特性。隨著存料量的增加,功率也隨之增加并達(dá)到一個(gè)極值,之后隨著存料量的增加磨機(jī)功率不斷下降。
(2)與功率特性類似,球磨機(jī)的出力與存料量也存在著極值特性,在前期,磨機(jī)的出力隨著存料量的增加基本上是呈線性上升趨勢(shì),之后達(dá)到出力峰值,即最佳出力點(diǎn),隨后繼續(xù)增加存料量出力則減小。系統(tǒng)的最大出力點(diǎn)在磨機(jī)最大功率點(diǎn)的右側(cè),說明在最大出力點(diǎn)時(shí)磨機(jī)消耗電能小,此出力點(diǎn)即為需要的最佳出力點(diǎn)。
(3)當(dāng)球磨機(jī)內(nèi)存料量即磨機(jī)負(fù)荷較小時(shí),磨音較大,隨著負(fù)荷的逐步增大,磨音呈下降趨勢(shì)。但當(dāng)磨機(jī)出力達(dá)到最佳點(diǎn)時(shí),磨音與存料量之間達(dá)到相對(duì)穩(wěn)定的狀態(tài),后期的磨音信號(hào)變得非常平坦[3]。
通過對(duì)球磨機(jī)特性曲線的分析,可以把磨機(jī)的工作狀態(tài)分為3個(gè)部分。①磨音清脆,磨機(jī)功率小,此時(shí)球磨機(jī)在欠磨狀態(tài)下運(yùn)行,磨礦效率和出力均較低。②磨音信號(hào)減弱,磨機(jī)功率也逐步減小,但出力逐步增大。由現(xiàn)場(chǎng)數(shù)據(jù)得知,當(dāng)達(dá)到最佳出力點(diǎn)附近時(shí),磨音約為61 dB[4]。在此區(qū)域內(nèi)磨機(jī)出力大且磨機(jī)耗電量小,此區(qū)域即磨機(jī)負(fù)荷最佳區(qū)域。③磨音信號(hào)非常平坦,隨著磨機(jī)負(fù)荷的增加,出力逐步下降,此時(shí)磨機(jī)在飽磨狀態(tài)下運(yùn)行,應(yīng)盡量避免在此區(qū)域工作。
2 信息融合技術(shù)的引入
信息融合技術(shù)是由多傳感器融合技術(shù)發(fā)展而來的[5]。信息融合技術(shù)已成功且廣泛地應(yīng)用于各個(gè)領(lǐng)域。其針對(duì)給定的決策任務(wù),以智能化合成為方法,將多個(gè)信息進(jìn)行集成融合,其效果比單一的信息源更加精準(zhǔn)、可靠與穩(wěn)定[6]。因此信息融合技術(shù)逐漸在控制領(lǐng)域有所興起。本文以信息融合理論為基礎(chǔ),設(shè)計(jì)并實(shí)現(xiàn)了球磨機(jī)負(fù)荷的專家控制系統(tǒng)。
信息融合可分為數(shù)據(jù)級(jí)融合、特征級(jí)融合和決策級(jí)融合,本系統(tǒng)采用決策級(jí)融合[6],其結(jié)構(gòu)圖如圖1所示。
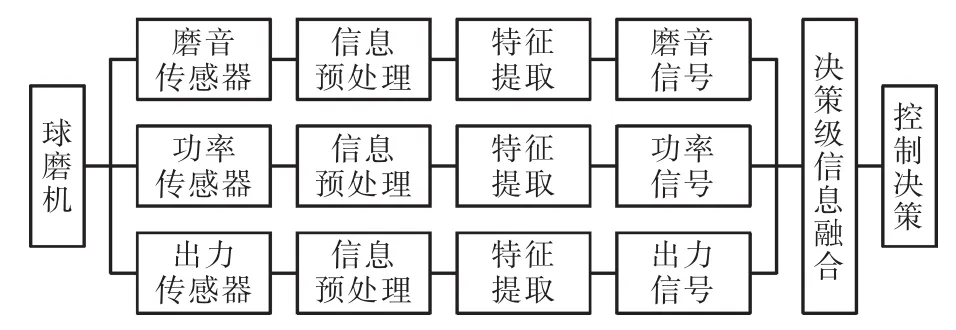
圖1 信息融合結(jié)構(gòu)圖Fig.1 Structure of information fusion
決策級(jí)融合屬于高層次的融合,具有容錯(cuò)性好和實(shí)時(shí)性等優(yōu)點(diǎn)。本設(shè)計(jì)通過模糊優(yōu)化決策實(shí)現(xiàn)對(duì)磨機(jī)負(fù)荷的實(shí)時(shí)控制,以動(dòng)態(tài)尋找最優(yōu)出力點(diǎn)。
3 動(dòng)態(tài)尋優(yōu)控制原理與控制策略
3.1 動(dòng)態(tài)尋優(yōu)控制原理
動(dòng)態(tài)尋優(yōu)控制屬于最優(yōu)控制的一種,但最優(yōu)控制器的設(shè)計(jì)與實(shí)現(xiàn)需要建立在被控對(duì)象數(shù)學(xué)模型的基礎(chǔ)上。對(duì)于工業(yè)應(yīng)用的對(duì)象來說,因?yàn)橄到y(tǒng)本身具有復(fù)雜性和參數(shù)時(shí)變性,因此建立精確的數(shù)學(xué)模型而非易事。Draper和Laning等人以此為背景,設(shè)想由設(shè)計(jì)人員事先了解與掌握的被控對(duì)象的性質(zhì)與特性,通過自動(dòng)控制系統(tǒng)完成對(duì)被控對(duì)象的實(shí)時(shí)控制。因此在設(shè)計(jì)控制系統(tǒng)時(shí)就不需要被控對(duì)象的精確參數(shù)及模型,而是運(yùn)用不斷測(cè)量、逐步尋優(yōu)的方法,按某種優(yōu)化準(zhǔn)則,自動(dòng)尋找某狀態(tài)下系統(tǒng)的最優(yōu)工作點(diǎn),稱為自尋優(yōu)控制[7],又稱動(dòng)態(tài)尋優(yōu)控制。
動(dòng)態(tài)尋優(yōu)控制的工作原理是在了解被控對(duì)象的極值特性狀況下,通過逐步改變被控量,自動(dòng)搜索最佳性能指標(biāo),使系統(tǒng)在最佳的性能或最佳性能附近運(yùn)行[8]。動(dòng)態(tài)尋優(yōu)所要尋找的最佳目標(biāo)不是固定值,而是在實(shí)際生產(chǎn)的動(dòng)態(tài)過程中逐步搜索獲得。如圖2所示,曲線1對(duì)應(yīng)的最佳控制指標(biāo)為B1,此時(shí)的控制量為A1,當(dāng)系統(tǒng)受到干擾而使被控對(duì)象特性變?yōu)榍€2后,系統(tǒng)利用動(dòng)態(tài)尋優(yōu)控制搜索到的最佳控制指標(biāo)為B2,此時(shí)的控制量為A2,新特性下的最優(yōu)控制指標(biāo)有可能低于擾動(dòng)前的最優(yōu)指標(biāo),但如果仍保持控制量在A1而不做尋優(yōu)改變時(shí),對(duì)應(yīng)的控制指標(biāo)為B3,比經(jīng)過尋優(yōu)的指標(biāo)B2要差很多,因此利用動(dòng)態(tài)尋優(yōu)控制能使系統(tǒng)一直在最佳控制指標(biāo)狀態(tài)下運(yùn)行。
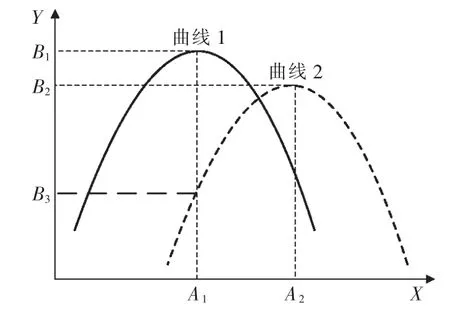
圖2 系統(tǒng)極值動(dòng)態(tài)特性Fig.2 Extreme dynamic characteristics of the system
動(dòng)態(tài)尋優(yōu)能夠?qū)崿F(xiàn)對(duì)系統(tǒng)最優(yōu)指標(biāo)的自動(dòng)搜索,適合在工作環(huán)境及特性時(shí)刻改變的情況下尋找最優(yōu)工作點(diǎn),這是其他控制方法難以實(shí)現(xiàn)的。
3.2 基于步進(jìn)搜索的動(dòng)態(tài)尋優(yōu)控制策略
步進(jìn)搜索法是動(dòng)態(tài)尋優(yōu)控制中應(yīng)用比較廣泛的方法。其原理可以用以下步驟來描述:首先記錄當(dāng)前系統(tǒng)的輸出指標(biāo)值y1,然后將控制量增加一個(gè)步長(zhǎng),此時(shí)檢測(cè)并記錄增加步長(zhǎng)后的系統(tǒng)輸出指標(biāo)值 y2,如果 y2-y1>0,則此調(diào)節(jié)方向正確,否則方向錯(cuò)誤。圖3為步進(jìn)搜索法的原理圖。
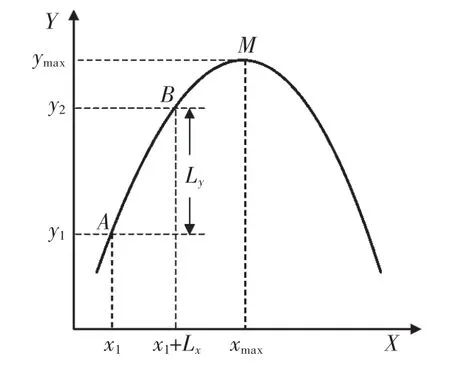
圖3 步進(jìn)搜索法原理Fig.3 Schematics of stepping search method
假設(shè)某一時(shí)刻系統(tǒng)在 A(x1,y1)點(diǎn)工作,M(xmax,ymax)為系統(tǒng)的最佳工作點(diǎn)。步進(jìn)搜索的目的是由A點(diǎn)出發(fā)逐步逼近M點(diǎn)。首先給控制量x增加一個(gè)步長(zhǎng) Lx,則系統(tǒng)由 A 點(diǎn)移動(dòng)到 B(x1+Lx,y1+Ly)點(diǎn)工作。由數(shù)學(xué)知識(shí)可知,Ly/Lx的大小和方向可以近似視為曲線在A點(diǎn)的斜率:

如果曲線具有單極值,則式(1)的符號(hào)可以確定最佳工作點(diǎn)的走勢(shì)方向,即當(dāng)K>0時(shí),最佳工作點(diǎn)在當(dāng)前工作點(diǎn)的右側(cè),當(dāng)K<0時(shí),最佳工作點(diǎn)在當(dāng)前工作點(diǎn)的左側(cè)。
4 模糊變步長(zhǎng)動(dòng)態(tài)尋優(yōu)控制器設(shè)計(jì)
在逐步搜索系統(tǒng)最優(yōu)工作點(diǎn)時(shí),當(dāng)搜到一定程度,如果K<0,則說明前一次搜索已達(dá)到最佳工作點(diǎn),那么此次搜索稱為“搜索損失”[9]。為了盡量減小搜索損失,本控制器的設(shè)計(jì)采用基于多信息融合變步長(zhǎng)動(dòng)態(tài)尋優(yōu)方法,步長(zhǎng)值通過模糊控制方法得出。圖4為控制器的結(jié)構(gòu)圖。
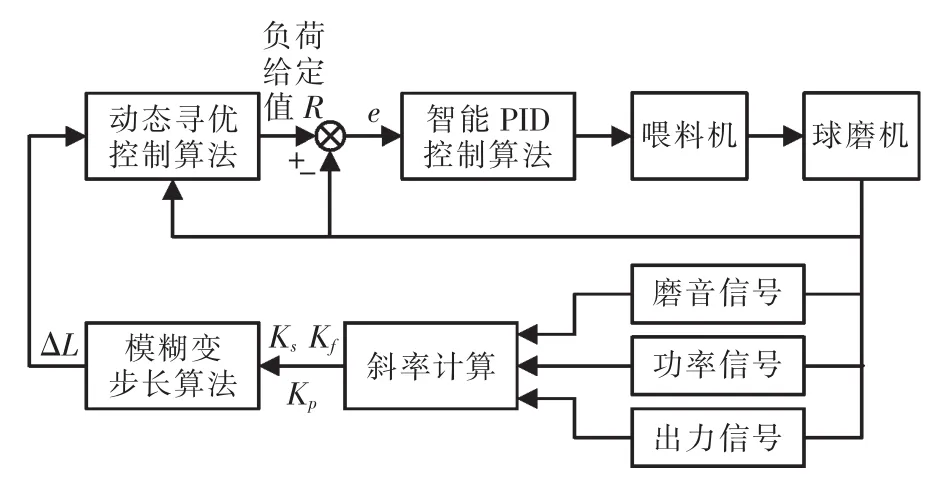
圖4 變步長(zhǎng)動(dòng)態(tài)尋優(yōu)控制器結(jié)構(gòu)Fig.4 Structure of variable step size dynamic optimization controller
模糊變步長(zhǎng)動(dòng)態(tài)尋優(yōu)控制器的原理為
(1)當(dāng)磨音的斜率小于零、功率斜率大于零且出力斜率大于零時(shí)采用較大步長(zhǎng),目的是盡快找到最優(yōu)出力區(qū);
(2)當(dāng)磨音的斜率小于零、功率斜率小于零且出力斜率大于零時(shí)采用較小步長(zhǎng),以免由于步長(zhǎng)過大造成較大的搜索損失;
(3)當(dāng)磨音的斜率等于零、功率斜率小于零且出力斜率大于零時(shí),說明已經(jīng)搜索到最優(yōu)工作點(diǎn),此時(shí)采用零步長(zhǎng)來保持最佳工作狀態(tài);
(4)當(dāng)磨音的斜率等于零、功率斜率小于零且出力斜率小于零時(shí),表明此時(shí)磨機(jī)處于過負(fù)荷運(yùn)行,因此采用負(fù)步長(zhǎng)使磨機(jī)回復(fù)到正常運(yùn)行狀態(tài)。
通過現(xiàn)場(chǎng)數(shù)據(jù)反映,在實(shí)際磨礦過程中球磨機(jī)的裝載量步長(zhǎng)范圍為(-2~+2)t/h,斜率范圍為-10~+10。那么此控制器的輸入量為磨音S、功率P和出力 F的斜率,論域均為[-10,10],模糊子集均為{N、Z、P},分別代表{負(fù)、零、正};輸出量為搜索步長(zhǎng)值 ΔL,論域?yàn)椋?2,2],模糊子集為{NB、NS、ZE、PS、PB},分別代表{負(fù)大、負(fù)小、零、正小、正大}。 隸屬度函數(shù)均采用高斯函數(shù)。
5 智能PID控制器的設(shè)計(jì)
由磨機(jī)的動(dòng)態(tài)特性可知,傳統(tǒng)的PID控制已無法達(dá)到預(yù)期的控制效果,因此本文提出一種Bang-Bang與模糊PID相結(jié)合的控制器。為了盡量縮短系統(tǒng)的調(diào)節(jié)時(shí)間,當(dāng)系統(tǒng)當(dāng)前負(fù)荷量與經(jīng)過優(yōu)化算法得出的負(fù)荷控制量的偏差較大時(shí)采用Bang-Bang控制,使兩個(gè)負(fù)荷量的偏差降低到比較小的范圍內(nèi),此后采用模糊PID控制,目的是防止采用Bang-Bang控制后給系統(tǒng)帶來過大的超調(diào),而且模糊PID控制能增強(qiáng)控制系統(tǒng)的魯棒性[10]。智能PID控制器的結(jié)構(gòu)圖如圖5所示。
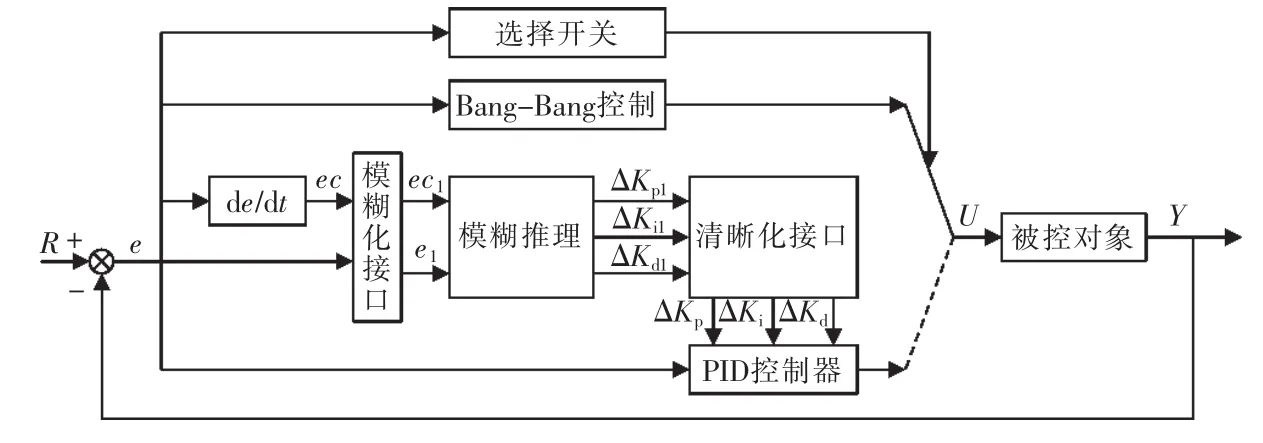
圖5 智能PID結(jié)構(gòu)Fig.5 Structure of intelligent PID
5.1 Bang-Bang控制
Bang-Bang控制是一種最優(yōu)切換控制,是指在控制范圍允許的范圍內(nèi),被控量從一個(gè)邊界值切換到另一個(gè)邊界值[10]。
式中,u為Bang-Bang控制的當(dāng)前輸出值,當(dāng)給礦量的誤差大于ε時(shí),控制器以最大值umax輸出,當(dāng)給礦量的誤差小于ε時(shí),控制器輸出為0,此時(shí)切換到模糊PID控制。
5.2 模糊PID控制
根據(jù)實(shí)際需要,以給礦量的偏差e和偏差變化率ec作為控制器的輸入量,輸出量為PID的三個(gè)參數(shù)值Kp、Ki、Kd,利用模糊控制實(shí)現(xiàn)對(duì)PID參數(shù)的自整定。各參數(shù)值由式(3)算出[11]。
式中:Kp′、Ki′、Kd′為第 N-1 次采樣時(shí)的 PID 參數(shù)值;ΔKp、ΔKi、ΔKd為對(duì)第 N-1 次采樣各參數(shù)的整定值;Kp、Ki、Kd為第 N次采樣的 PID參數(shù)值。 在模糊控制器的設(shè)計(jì)中,輸入量和輸出量的論域均為[-6,6], 模糊子集為{NB、NM、NS、ZE、PS、PM、PB},隸屬度函數(shù)采用三角形函數(shù)。
6 系統(tǒng)的軟件和硬件設(shè)計(jì)
興隆某選礦廠由一段磨礦分級(jí)系統(tǒng)組成,共四個(gè)系列,磨機(jī)型號(hào)為2.7×3.7 m,分級(jí)機(jī)內(nèi)的返砂返回到一段磨機(jī),分級(jí)機(jī)的溢流進(jìn)入一段磁選機(jī)。選礦自動(dòng)化系統(tǒng)采用基于西門子PLC的集散控制系統(tǒng)(DCS)結(jié)構(gòu)方式,控制器采用西門子的CPU315-2PN/DP模塊構(gòu)成中央控制單元,由以太網(wǎng)組成計(jì)算機(jī)與PLC的通訊網(wǎng)絡(luò),現(xiàn)場(chǎng)IO采用4個(gè)分布式輸入輸出ET-200M模塊構(gòu)成4個(gè)系列的輸入輸出控制。Profibus-DP實(shí)現(xiàn)CPU模塊到ET-200M網(wǎng)絡(luò)連接。系統(tǒng)上位機(jī)與下位機(jī)采用工業(yè)以太網(wǎng)通信協(xié)議,通訊速率為100 M,系統(tǒng)預(yù)留10%的IO模塊,以備擴(kuò)展。PLC通過RS485與工控計(jì)算機(jī)進(jìn)行實(shí)時(shí)通訊,以達(dá)到對(duì)磨機(jī)負(fù)荷的實(shí)時(shí)控制。軟件方面,采用組態(tài)軟件WINCC完成人機(jī)交互與系統(tǒng)各參數(shù)的設(shè)定。
7 運(yùn)行效果及仿真研究
本磨機(jī)負(fù)荷控制系統(tǒng)在興隆某選礦廠的1#磨機(jī)系統(tǒng)中進(jìn)行了試運(yùn)行,圖6為實(shí)際運(yùn)行效果圖。由圖6可以看出在本控制器的作用下磨機(jī)負(fù)荷與給礦量能夠平穩(wěn)的運(yùn)行,系統(tǒng)無大幅度波動(dòng),能夠在比較穩(wěn)定的狀態(tài)下運(yùn)行。
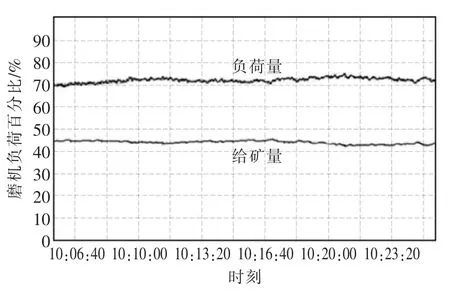
圖6 實(shí)際運(yùn)行效果圖Fig.6 Figure of actual operating results
為了智能PID控制器的優(yōu)越性,特此進(jìn)行了仿真實(shí)驗(yàn)[12]。被控對(duì)象模型可近似用二階系統(tǒng)代替,其傳函為

采用Matlab/Simulink作為實(shí)驗(yàn)工具,輸入信號(hào)選用單位階躍信號(hào),仿真結(jié)果如圖7所示。
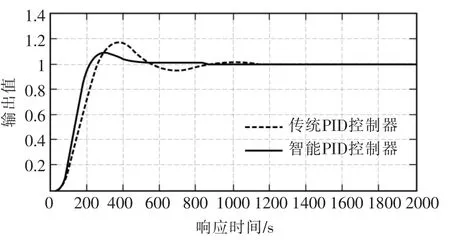
圖7 仿真結(jié)果圖Fig.7 Simulation results
可以看出,智能PID比傳統(tǒng)的PID控制器的調(diào)節(jié)時(shí)間短,超調(diào)量有所減小,而且也有較小的穩(wěn)態(tài)誤差。
8 結(jié)語
本文介紹了一種基于多信息融合的變步長(zhǎng)磨機(jī)負(fù)荷動(dòng)態(tài)尋優(yōu)專家控制系統(tǒng),該系統(tǒng)能針對(duì)系統(tǒng)的動(dòng)態(tài)特性實(shí)現(xiàn)對(duì)磨機(jī)負(fù)荷的動(dòng)態(tài)尋優(yōu)。本系統(tǒng)成功應(yīng)用于實(shí)際選礦廠,降低了工人的勞動(dòng)強(qiáng)度,提高了工廠的生產(chǎn)效率和安全性,并且達(dá)到了節(jié)能減耗的目的。
[1] 趙珊珊.火電廠中鋼球磨煤機(jī)的優(yōu)化控制[D].北京:華北電力大學(xué),2012:1-6.
[2] 喬锃,張彥斌,李純,等.火電廠球磨機(jī)尋優(yōu)節(jié)能控制系統(tǒng)的研究與開發(fā)[J].熱力發(fā)電,2005(12):80-110.
[3] 劉月丹.鋼球磨煤機(jī)制粉系統(tǒng)的優(yōu)化控制算法研究及實(shí)現(xiàn)[D].北京:華北電力大學(xué),2011:8-10.
[4] 張杰,王建民,楊志剛,等.承德某選礦廠磨機(jī)運(yùn)行專家系統(tǒng)[J].金屬礦山,2013(7):144-148.
[5] 吳超中,徐成偉.信息融合技術(shù)的研究[J].信息技術(shù),2008(1):18-20.
[6] 葉碎高,何斌,彭安幫,等.信息融合技術(shù)在防洪決策中的應(yīng)用分析研究[J].南水北調(diào)與水利科技,2012,10(5):101-107.
[7] 孫浩津.林產(chǎn)工業(yè)中鍋爐燃燒系統(tǒng)基于步進(jìn)搜索法的自尋優(yōu)控制研究[J].當(dāng)代生態(tài)農(nóng)業(yè).2013(1):165-169.
[8] 王士超,白瑞祥.基于PLC的鍋爐燃燒模糊自尋優(yōu)控制[J].自動(dòng)化與儀表,2008,23(1):33-36.
[9] 葉彥斐.磨礦過程優(yōu)化控制及信息集成的應(yīng)用研究[D].四川:電子科技大學(xué),2004:35-37.
[10]歐青立,吳興中,崔力.Bang-Bang+模糊PID煤濕度控制器設(shè)計(jì)與實(shí)現(xiàn)[J].電子測(cè)量與儀器學(xué)報(bào),2010,24(8):786-790.
[11]宋樂鵬,劉斌,陳紅芬,等.基于Bang-Bang模糊自適應(yīng)PID的干燥窯溫度控制[J].計(jì)算機(jī)與應(yīng)用化學(xué),2012,29(7):881-884.
[12]劉金琨.先進(jìn)PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2011:288-296.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46