反應式腹部觸診模擬裝置氣動系統的研究
2014-03-09 03:31:06楊濤李笑關婷黃惠敬盧誠君
機床與液壓 2014年10期
關鍵詞:系統
楊濤,李笑,關婷,黃惠敬,盧誠君
(1.廣東工業大學機電工程學院,廣東廣州 510006;2.廣州軍區廣州總醫院,廣東廣州 510010)
反應式腹部觸診模擬裝置氣動系統的研究
楊濤1,李笑1,關婷2,黃惠敬1,盧誠君1
(1.廣東工業大學機電工程學院,廣東廣州 510006;2.廣州軍區廣州總醫院,廣東廣州 510010)
根據診斷學中腹部觸診教學的要求,設計了一種新型的反應式腹部觸診模擬裝置氣動系統,研制了模擬裝置的氣動驅動器,設計了系統控制結構及控制算法,實驗研究了模擬裝置氣動系統的控制特性和機械特性。結果表明:該系統能實現對氣動驅動器內部壓力及其硬度的控制,可模擬受訓者進行腹部觸診時的感覺。該研究將為設計新型的具有反應式的臨床教學裝置提供依據和參考。
氣動系統;腹部觸診;模擬裝置;氣動驅動器
腹部觸診是一種通過按壓腹部病變及正常區域,根據病人疼痛反應判斷腹部疾病的方法[1],是醫科學生必須掌握的重要基本技能,只有通過反復訓練才能夠熟練掌握。傳統的腹部觸診技能訓練只能在病人身上進行。由于適合教學的典型患者數量遠遠不能滿足教學需求,即使有典型病人,很多醫科學生在病人身上練習腹部觸診,必然會增加病人的痛苦,甚至使病情加重,病人難以接受[2-5]。
目前大多數發達國家和地區的高等院校都已經在系統地規劃和建設醫學模擬培訓場所。在這種形勢的影響下,醫學教學模擬裝置的研究逐漸發展起來。國內外臨床應用的模擬裝置絕大多數屬于靜態模擬裝置,即不能提示受訓者對腹部觸診的觸覺和力覺[6-7]。少數類型模擬裝置屬于動態模擬裝置,其內部主要利用以電機為動力的機械結構實現病人的病癥反應。該類型的模擬裝置在實際使用時雖有力覺反應,但是由于內部機械系統剛度等的影響,腹部觸覺極度失真,展現出來的癥狀反應與真實情況相差較大,難以獲得高質量的體驗性教學效果[8]。
為解決這一難題,模擬受訓練者在觸診過程中對病人腹壁緊張度、壓痛和反跳痛的感覺,設計了一種反應式腹部觸診模擬裝置氣動系統[9],對系統的控制特性和機械特性進行了研究。
1 反應式腹部觸診模擬裝置氣動系統設計
1.1 氣動系統組成原理
如圖1所示,反應式腹部觸診模擬裝置的氣動系統由觸覺傳感器1、氣動驅動器2、壓力傳感器3、控制器4、比例減壓閥5、三聯件6以及氣源7組成。氣動驅動器為采用彈性硅橡膠和簾線通過黏結制成的多層網狀結構的囊體。數個觸覺傳感器分布在氣動驅動器上表面,用來檢測手指按壓位置及作用力大小。外腹壁模擬人體外腹部組織形態及彈性,覆蓋在氣動驅動器及其上的傳感器上。控制器用來采集、處理和顯示測量信號,分析、計算和輸出控制信號。壓力傳感器與氣動驅動器相連,用來檢測氣動驅動器內部氣體壓力。比例減壓閥出口接于氣動驅動器,用來調節氣動驅動器內氣體壓力。氣源通過三聯件向比例減壓閥提供高于其出口壓力的恒壓氣體。
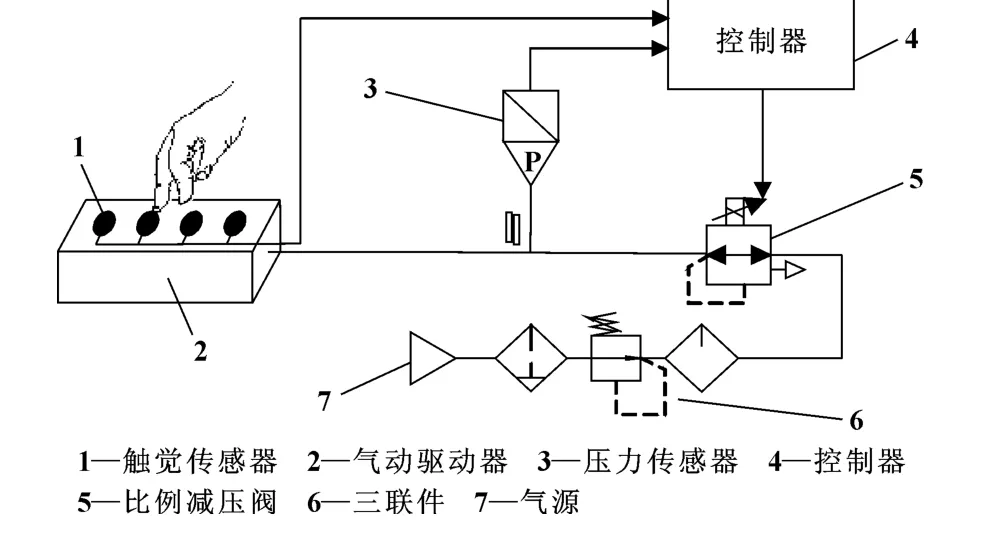
圖1 反應式腹部觸診模擬裝置氣動系統組成原理
當手指按壓外腹壁時,觸覺和壓力傳感器分別將手指按壓位置、作用力及氣體壓力信號反饋給控制器,控制器經過控制運算后,輸出控制信號給比例減壓閥,比例減壓閥調節其出口壓力,使氣動驅動器變硬,模擬病人腹肌收縮的疼痛體征,提供受訓者對腹部觸診的感覺。
1.2 氣動驅動器設計
氣動驅動器是所設計的腹部觸診模擬裝置氣動系統的核心部件,通過控制氣動驅動器內部氣體壓力改變其軟硬,從而模擬病人腹肌收縮的疼痛體征。該驅動器采用彈性硅橡膠和簾線通過黏結制成多層網狀結構,如圖2所示。
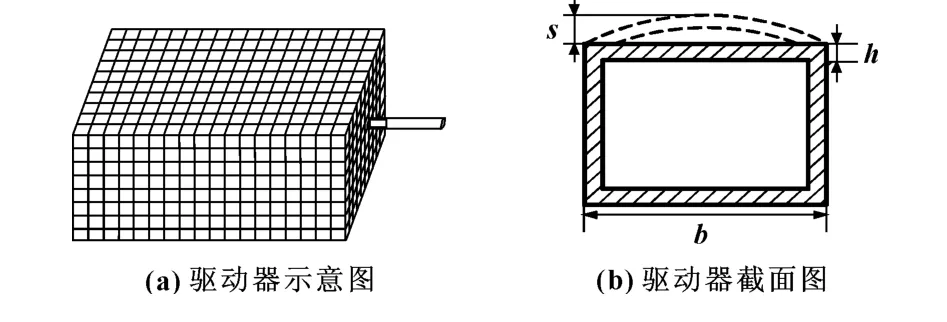
圖2 氣動驅動器

圖3 控制系統結構圖
建立氣動驅動器的數學模型并加以簡化,得到氣動驅動器內氣體壓力p與氣動驅動器上表面橫向中線的微小位移s的關系為:

式中:E為氣動驅動器的彈性模量;h為氣動驅動器囊壁的平均厚度;b為氣動驅動器的寬度。
根據邵氏硬度的測量原理可知,當氣動驅動器彈性模量及尺寸大小等確定后,氣動驅動器的軟硬變化在數學模型中由s體現出來,s越大驅動器硬度越大[10]。
由式 (1)可知,在給定壓力p下,對氣動驅動器硬度變化影響最大的因素是材料的彈性模量E。而一旦驅動器制作完成,E就固定不變。所以必須設計制作滿足材料彈性模量要求的氣動驅動器。
由計算簾線-橡膠復合材料彈性模量大小的偏軸性能的Gough-Tangorra公式[11]可知,制作氣動驅動器的復合材料彈性模量計算公式為:
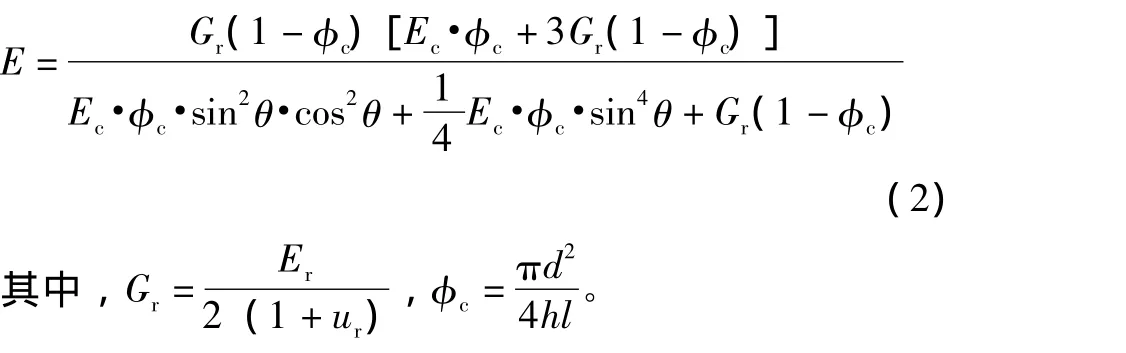
式中:Gr、Er、ur分別為橡膠的剪切彈性模量、彈性模量、泊松比;φc、Ec、θ、d、l分別為簾線的體積分數、彈性模量、簾線角、簾線直徑、簾線間距。
根據式 (2),設計簾線角、簾線間距等參數,即可制作出彈性模量滿足裝置要求的氣動驅動器。
1.3 控制器設計
如圖3所示,該裝置的控制系統采用前饋-PID反饋復合控制。其特點在于前饋控制使系統響應迅速,PID控制能對被控量進行反饋調節[12]。
觸覺傳感器將檢測到的手指壓力p轉換為電壓信號ui,經過醫學經驗算法的運算得到氣動驅動器的給定壓力r(t),作為前饋-PID反饋控制器的輸入值。g(t)為壓力傳感器對氣動驅動器內氣體壓力的測量值。前饋控制器的輸出量為:

式中:K為前饋系數。
PID反饋控制器的輸出量為:

式中:KP為比例系數,TI為積分時間系數,TD為微分時間系數。
則前饋-PID反饋控制器輸出的控制量為:

比例減壓閥根據控制量u(t)調節其出口壓力,并改變氣動驅動器的硬度,從而模擬病人腹肌收縮的疼痛體征。
2 實驗研究
作者對所設計的反應式腹部觸診模擬裝置氣動系統的控制特性和機械特性進行了大量實驗研究。
圖4為在隨機給定壓力信號下,氣動驅動器內部實時壓力跟隨曲線。通過調節控制器前饋系數K和PID參數,實現了對驅動器內部壓力的精確控制。由于不同病情的患者及受訓者觸診訓練時按壓位置和壓力不同,受訓者體驗到的觸覺和力覺感受各不相同。精確控制驅動器內部壓力,能實現腹肌硬度變化的微小差異的模擬。
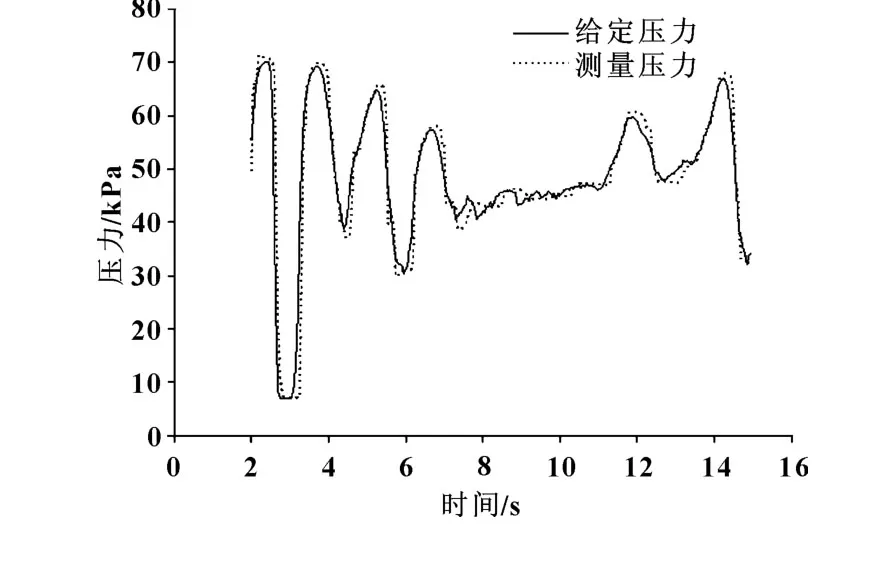
圖4 實時壓力信號跟隨實驗曲線
圖5為將給定隨機壓力信號延時500 ms后,驅動器對延時給定信號的壓力跟隨曲線。在實際腹部觸診中,腹部肌肉的硬度變化是在操作者手指按壓患者腹部病變區域一段時間后產生的。因此在控制算法中加入延時,可以使癥狀反應更加逼真。
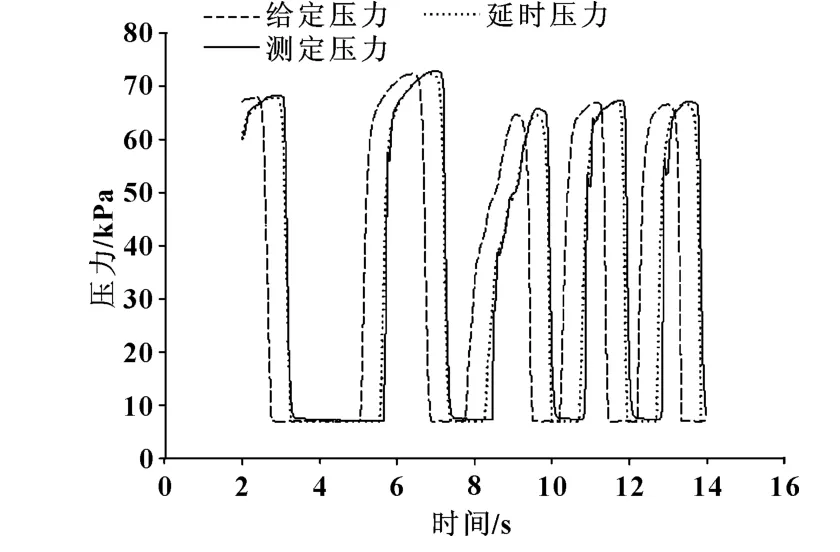
圖5 延時壓力信號跟隨實驗曲線
由于所設計的模擬裝置以氣動驅動器的壓力-硬度特性提示觸覺和力覺,因此必須對氣動系統中驅動器的機械特性進行研究。以下分別通過實驗、ANSYS仿真以及理論計算,研究了氣動驅動器內壓與硬度變化關系。
圖6為驅動器在不同壓力p下,上表面橫向中線微小位移s的變化曲線。從圖中看出,三條曲線的變化趨勢一致,且s值比較接近。用氣動驅動器內部壓力來反映其硬度的變化是可行的。
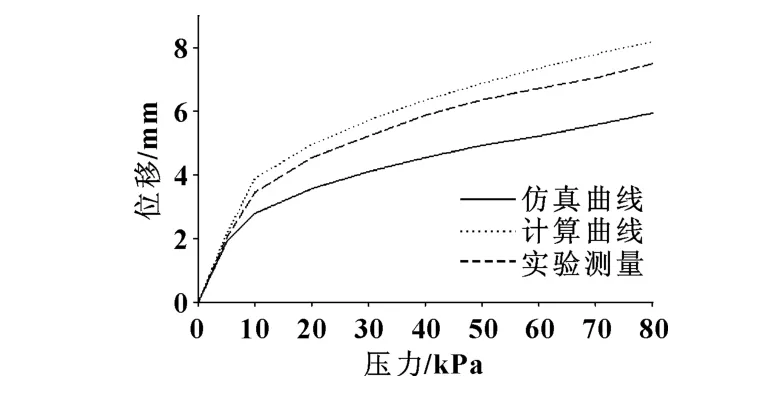
圖6 驅動器內壓與硬度關系曲線
為了能準確提示受訓者對腹膜炎、闌尾炎、膽囊炎等病癥的觸覺和力覺,需根據人體對觸診痛覺和腹部肌肉變化的規律,設計合理有效的醫學經驗算法。
3 結論
根據受訓者對腹部觸診技能掌握的要求,設計了一種新型的反應式腹部觸診模擬裝置氣動系統。該系統融合了氣動、傳感器和智能控制等技術于一體,使受訓者能夠真實體驗腹部觸診中的觸覺和力覺感受,可為設計新型的教學用觸診模型提供參考。
【1】董福慧.觸診診斷學[M].北京:北京科學技術出版社,2005:49-55.
【2】何曉峰,張存泰,劉文勵.電子標準化病人教學系統在診斷學教學中的應用[J].中國現代醫學雜志,2006,16(1):158-160.
【3】余國龍,楊天倫,張冬梅.檢體診斷學教學中心肺聽觸診和腹部觸診計算機模擬人實施效果的評價[J].中華醫學教育雜志,2008,28(1):78 -79.
【4】鄒莉萍,羅和生,董衛國.醫學模擬技術在診斷學實驗教學與考試中的應用[C]//第十二屆全國高等醫學院校診斷學教學研討會,北京,2009:176 -177.
【5】溫海青,龐建會,馬春虎.淺談在臨床技能集中培訓教學中應用電子模型的體會[J].承德醫學院學報,2005,22(3):272-273.
【6】NILES Tyler,LIND D Scott,JOHNSEN Kyle.Medicine Meets Virtual Reality 18[M].Holland:ISO Press,2011:408 -414.
【7】HAMZA-LUPFelix G,BOGDA-N Crenguta M,SEITAN Adrian.Medicine Meets Virtual Reality 19 [M].Holland:ISO Press,2012:156-160.
【8】盧貴東.教學用全自動多功能腹部觸診聽診電子模擬人:中國,00252541.0[P].2001 -08 -22.
【9】李笑,楊濤,黃蕙敬,等.一種反應式腹部觸診模擬器:中國,201210304613[P].2012 -12 -19.
【10】邵龍泉,趙銥民,趙信義.SY-1和MDX4-4210硅橡膠拉伸性能、邵氏硬度的測定[J].實用口腔醫學雜志,2004,20(2):201-203.
【11】洪宗躍,吳桂忠.子午線輪胎有限元分析第4講簾線-橡膠復合材料[J].北京橡膠工業研究設計院,2006,26(1):55-61.
【12】侯伯杰,李小清,周云飛,等.直線電機伺服系統的復合前饋 PID 控制[J].機床與液壓,2009,37(2):56-58.
Research on Pneumatic System of Reactive Abdom inal Palpation Simulator
YANG Tao1,LIXiao1,GUAN Ting2,HUANG Huijing1,LU Chengjun1
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou Guangdong 510006,China;2.Guangzhou General Hospital of Guangzhou Military Command,Guangzhou Guangdong 510010,China)
According to the teaching requirements of abdominal palpation in diagnostics,a new type of pneumatic system of reactive abdominal palpation simulator was designed,the pneumatic actuator of the simulator was developed and the system control structure aswell as the control algorithm were designed.The control characteristics and mechanical properties of the pneumatic system of the simulator were investigated in experiments.The results show that this system can implement control the internal pressure and hardness of the pneumatic actuator,and simulate the feeling when trainees do abdominal palpation.This research can provide the basis and reference for designing a new type and reactive clinical teaching device.
Pneumatic system;Abdominal palpation;Simulator;Pneumatic actuator
TH138
A
1001-3881(2014)10-095-3
10.3969/j.issn.1001 -3881.2014.10.029
2013-03-28
廣東省科技計劃項目 (2006B12901008);廣東省大學生創新實驗項目 (1184510008)
楊濤 (1987—),男,碩士研究生,主要從事機電液氣一體化技術的研究。E-mail:yangtao870908@126.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
