“龍”飛船完美執行第三次空間站補給任務
2014-03-14 06:16:30郭筱曦北京空間科技信息研究所
國際太空 2014年9期
關鍵詞:發動機
郭筱曦(北京空間科技信息研究所)
“龍”飛船完美執行第三次空間站補給任務
郭筱曦(北京空間科技信息研究所)
2014年4月18日,美國太空探索技術(SpaceX)公司的獵鷹-9v1.1火箭升空,成功將“龍”飛船送入目標初始軌道,執行該公司第三次空間站補給任務。同時,火箭第一級在關機和級間分離之后還進行了海面軟濺落回收驗證試驗,成為此次任務的最大亮點。隨后,“龍”飛船用自身推力器提升軌道,4月20日與“國際空間站”交會,被站上機械臂捕獲,停靠在和諧號節點艙上。此次任務中,“龍”飛船共向“國際空間站”運送約2268kg貨物,任務持續一個月。5月18日,“龍”飛船攜帶1560kg系統硬件、科學貨物和廢物再入大氣層,安全濺落在太平洋上。

獵鷹-9v1.1火箭發射“龍”飛船

“龍”飛船被“國際空間站”上的機械臂捕獲

“龍”飛船安全濺落在太平洋上
1 任務背景
根據美國航空航天局與美國太空探索技術公司在2008年12月簽訂的價值16億美元的“商業補給服務”合同,美國太空探索技術公司要在2016年之前為美國航空航天局發射12艘“龍”飛船,共向“國際空間站”運送20t貨物。
此次任務是近13個月以來“龍”飛船的首次發射任務,遭遇數次推遲,間隔時間遠超預期,而這在極大程度上已超出美國太空探索技術公司的控制范圍。
2 運輸系統及任務方案
運載火箭升級,加裝著陸支腿
獵鷹-9v1.1是美國太空探索技術公司自主研制的兩級入軌運載火箭,以其v1.0型號為基礎,提升了有效載荷容量和可靠性,通過改進工藝而進一步降低了發射成本。它與獵鷹-9v1.0之間的主要差別是將第一級所用的灰背隼-1C發動機更換為動力更強大的灰背隼-1D發動機,第一級采用全新的發動機布局并加長第一、二級的推進劑貯箱。獵鷹-9v1.1火箭高68.4m,直徑3.66m,發射質量500t。火箭的近地軌道有效載荷能力可達13150kg,地球同步轉移軌道有效載荷能力為4850kg。
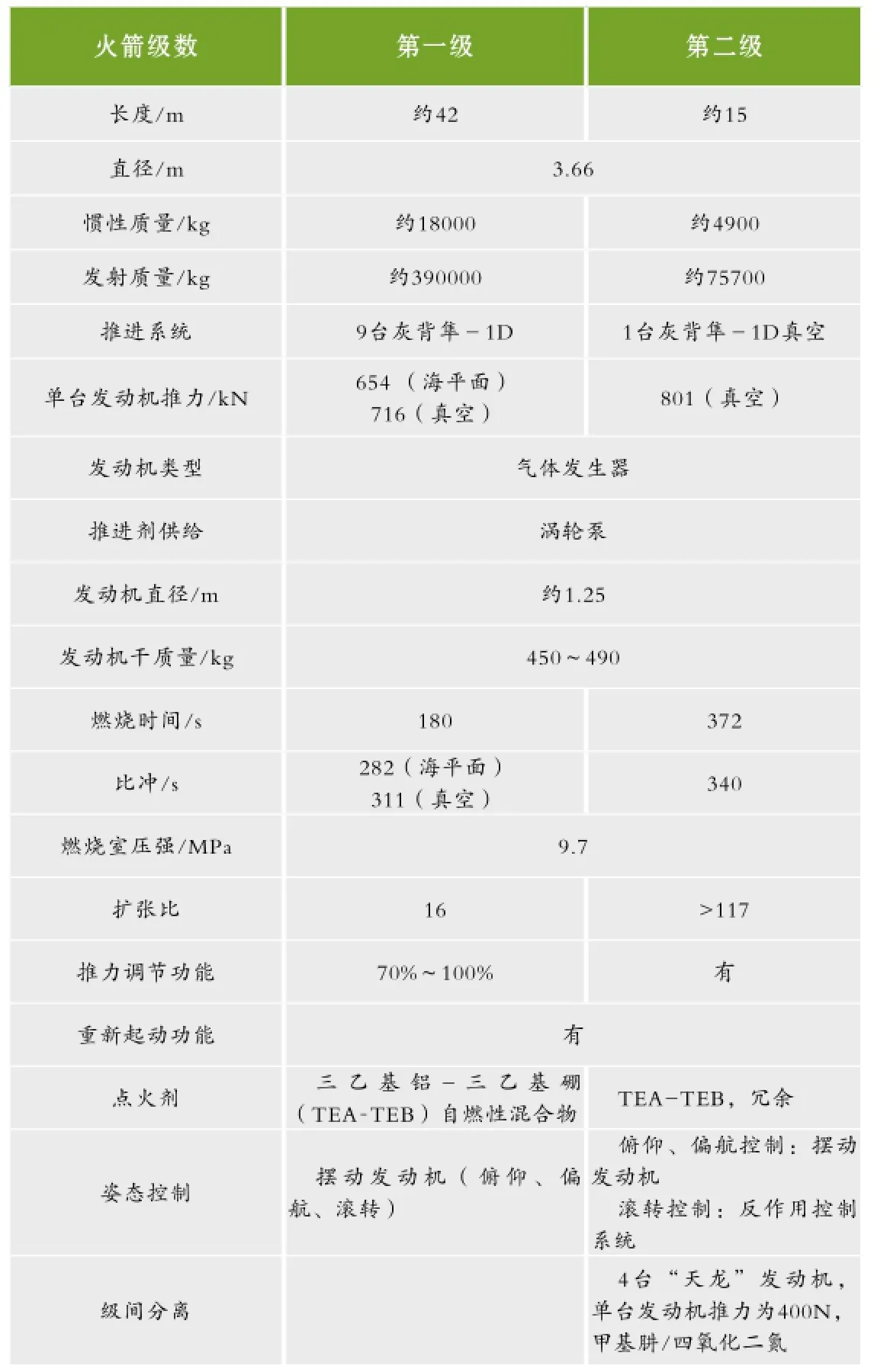
獵鷹-9v1.1技術參數
灰背隼-1D設計簡化了不再需要的子組件,在制造流程中采用改進工藝和質量控制手段,使美國太空探索技術公司每年能生產更多臺發動機,同時降低風險。原本在燃燒室上電鍍鎳鈷合金作為防護層,用于承受此壓力容器的主應力,現由爆炸成型的金屬外殼替代。這些改動延長了灰背隼-1D的疲勞壽命,并增加了燃燒室和噴管的熱余裕。此外,該發動機可在額定性能的70%至100%范圍內調節推力,而灰背隼-1C不具備推力調節功能。灰背隼-1D成為迄今全球推重比最高的液體燃料發動機,超過設計要求的150。
灰背隼-1D布局是另一項重大改動。獵鷹-9v1.0采用3×3“井”字布局,而獵鷹-9v1.1則采用八角形布局。8臺灰背隼-1D發動機排成一圈,環繞1臺位于中央的發動機,中央這臺發動機安裝上略低于其他發動機。這種新布局避開了過熱點,提升了熱特性。

獵鷹-9v1.1第一級發動機布局
與獵鷹-9v1.0相比,獵鷹-9v1.1第二級具有加長型推進劑貯箱,由單獨一臺灰背隼-1D真空發動機供以動力,是針對真空運轉加以優化的灰背隼-1D發動機,具有擴張比更高的噴管。發動機支持多重點火,能實現多種軌道和軌跡。該火箭的第二級還容納航電設備和飛行計算機,獵鷹-9v1.1做了很多改進。其全部航電設備和控制器都由美國太空探索技術公司內部制造,系統完全冗余,不斷進行自檢以驗證所有制導導航與控制部件運轉正常。為降低成本,美國太空探索技術公司采用耐輻射的商用現貨零件,而不是抗輻射設計。航電設備為三重冗余設計,火箭的慣性導航系統疊加全球定位系統(GPS),額外提供入軌精度。
飛船
“龍”飛船裝備有18臺“天龍”(Draco)推力器,分為四個吊艙,其中兩個吊艙各包含5臺“天龍”推力器,另外兩個各包含4臺“天龍”推力器。此小型火箭發動機由美國太空探索技術公司設計、研制和試驗,每臺可提供400N推力,用于在軌機動、姿態控制和長時間離軌點火,燃燒時間可變。“天龍”推力器使用四氧化二氮/甲基肼作為推進劑,任務過程中共消耗1290kg飛船攜帶的推進劑。“龍”飛船的反作用控制系統在所有軸上提供雙冗余。任意2臺“天龍”推力器失靈都不會影響任務。
“龍”飛船乘員艙的防熱罩要在再入過程中承受1600℃高溫。
飛行方案
獵鷹-9火箭的9臺灰背隼-1D發動機點火3s后火箭升空,升空17s后火箭速度達到馬赫數1,在升空后83s時刻穿過最大動壓力區域。第一級燃燒持續2min41s,關機3s后級間分離,隨后第二級點火,燃燒持續6min55s。起飛10min后,船箭分離,“龍”飛船順利入軌,隨即拋離太陽電池翼整流罩、展開1對太陽電池翼。
“龍”飛船在起動自身推進系統時遭遇故障,飛船上一個隔離閥沒有響應,使一部分推力器組無法自動啟用。美國太空探索技術公司任務控制人員查看情況后開始了切換至備用隔離閥的程序。此次飛行中出現的問題很可能與2013年3月第二次空間站補給任務中的無關,當時“龍”飛船推進劑加壓系統內的止回閥故障,導致4個推力器吊艙中的3個無法正常工作。
這一次,美國太空探索技術公司任務控制人員迅速解決了問題,但任務的一部分先期操作向后順延了,但對交會進度沒有影響。從近地點313km/遠地點332km軌道出發,“龍”飛船在發射后、捕獲前的兩天內進行了一系列軌道調整和調相機動。所有點火都按計劃執行。抵站當天稍晚時候,“龍”飛船開啟艙門,暴露出“龍眼”導航傳感器組和抓固器。
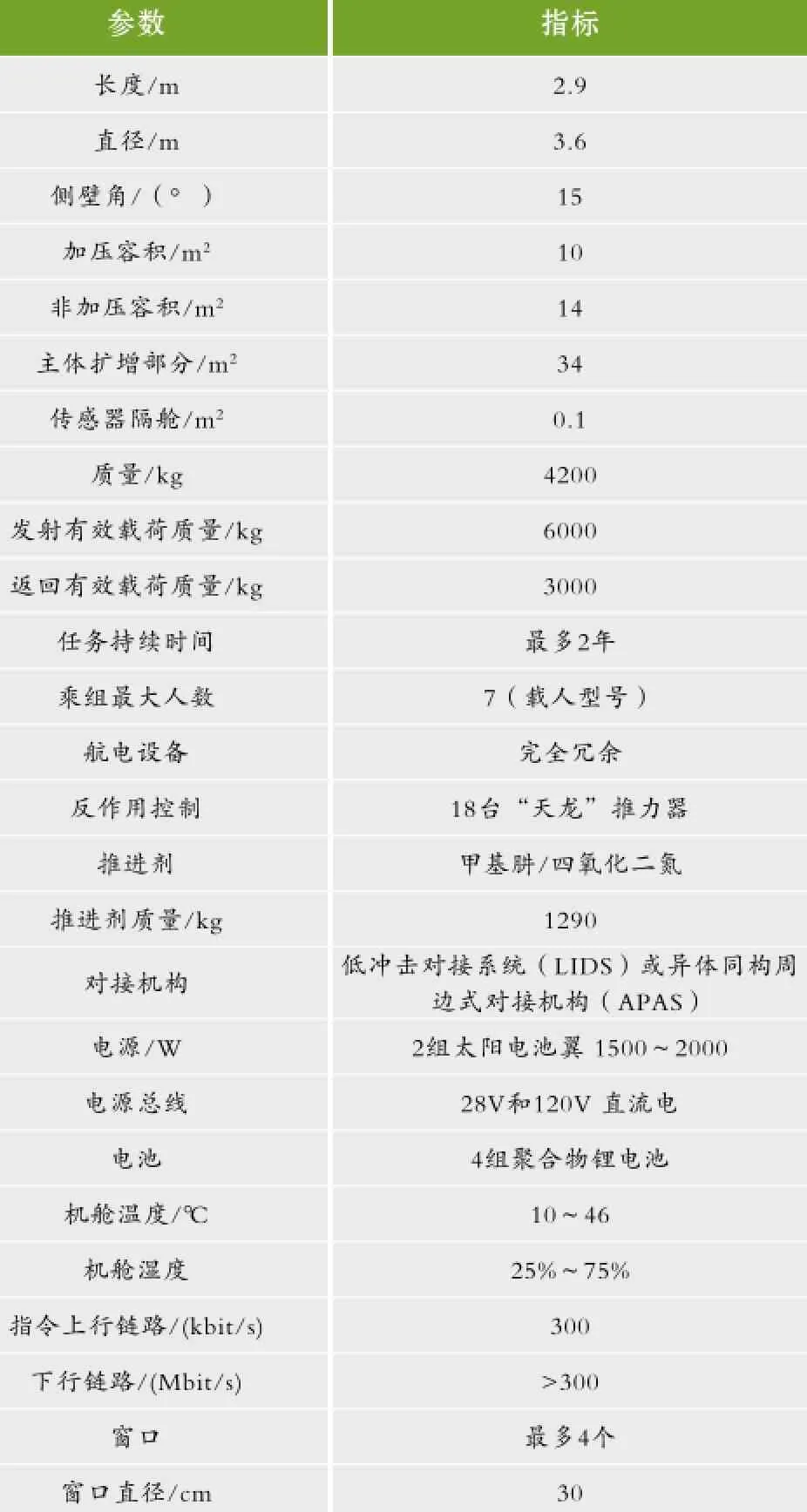
“龍”飛船技術參數
在捕獲前5h,飛船進入空間站周圍28km的通信區域,與空間站之間建立起超高頻直接鏈路。飛船使用鄰近通信鏈路作為與空間站的相對GPS通信。“龍”飛船利用絕對GPS進行高度調整點火與共橢圓機動點火,到達距空間站2.5km處,美國太空探索技術公司與美國航空航天局任務控制中心之間開始聯合運行,飛船隨后從絕對GPS切換至相對GPS。作為交會相對GPS階段的一部分,“龍”飛船接收來自空間站的GPS數據,與自身GPS數據相比較,計算出相對位置、速度和運動。在接近空間站的過程中,“龍”飛船可執行多次中程修正點火。站上乘員從距離1000m時開始持續監視“龍”飛船,準備在必要情況下采取措施。
兩次中程修正后,“龍”飛船在距空間站350m處執行一次180°的偏航機動,將其頭錐指向正確方位,以在發生意外時進行航向推進中止點火將飛船迅速推離空間站。再接近100m后,“龍”飛船自動進入“位置保持”模式,在此完成激光雷達和熱成像儀的最后調整和驗證。距空間站200m時,“龍”飛船進入空間站阻進區域,在此到訪飛行器必須滿足最高級別的安全性要求。從250m緩慢進近到30m,“龍”飛船再次懸停,任務控制人員再次進行系統評估決定是否執行最后接近。“龍”飛船非常緩慢地接近空間站,隨后停在距空間站10m的捕獲點。證實飛船處于恰當姿態后,飛船所有推力器關機,開始自由漂移。具體捕獲時間由光照條件決定。
控制加拿大臂-2的站上乘員通過機械臂上的自鎖型末端執行器相機跟蹤“龍”飛船的抓固器。捕獲后機械臂執行一系列動作,然后將“龍”飛船停靠在和諧號艙天底的通用停靠機構上。
3 任務最大亮點:火箭第一級完成軟濺落試驗
此次發射“龍”飛船第三次空間站補給任務的獵鷹-9v1.1火箭實現了一個重大里程碑,其第一級成功軟濺落在大西洋上。
該火箭第一級在點火升空后2min43s時刻分離,此時高度為80km,馬赫數10。分離后不久,第一級用自身的冷氣姿態控制系統轉向發動機前置姿態,使用其9臺灰背隼-1D發動機中的3臺進行制動機動。3臺發動機點火,在再入之前減慢箭體速度,確保箭體能承受再入。到升空后8min25s時刻,第一級已完成其再入點火,團隊開始接收來自第一級的遙測和視頻數據。遙測數據實時傳輸給位于卡納維拉爾角的TEL-4地面站,一架美國太空探索技術公司飛機開始在大西洋濺落區域上空盤旋。
隨著箭體高度降低,從卡納維拉爾角看已逐漸消失在地平線下,造成預料中的信號丟失。飛機記錄遙測數據供以后回放用,對關鍵的第一級著陸機動沒有實時觀測。
信號丟失前最后一個數據點的信息為第一級速度360m/s,高度8.5km,滾轉角速度接近零。馬斯克認為最后一點非常重要,因為去年九月獵鷹-9首次濺落試驗的時候曾出現滾轉角速度過高,滾轉無法控制,導致中央發動機的著陸點火縮短,因為推進劑受離心作用,破壞了貯箱導流板進而引起碎片進入發動機。此后團隊對第一級姿態控制系統進行了改進,使其在穿過大氣層的飛行過程中更好地處理滾轉角速度并有效降低滾轉率。此外,美國太空探索技術公司希望著陸支腿能額外增加箭體的穩定性,在最后點火過程中抑制滾轉。
在再入過程中,第一級有望因重心低(燃料幾乎空箱、發動機較重且在尾部)而保持穩定姿態飛行。一旦垂直下落并接近海面,獵鷹-9將點火中央發動機執行不到10s的最后著陸燃燒。隨著支腿展開和發動機點火,獵鷹-9將假裝海面是硬地面,隨后在大西洋實施軟濺落。
該火箭第二級到達目標軌道時,第一級預計將接觸海面,因數據需傳回、分析,最終結果確認需要花費數小時。計算機在接觸海面后持續發送數據直到第一級落回水平位置的事實證實第一級已成功軟濺落。
起初,美國太空探索技術公司估計第一級完整回收的成功率在30%~40%,因為第一級著陸嘗試主要用于收集數據,為今后任務改進控制程序;另一個促成成功概率微小的因素是當天回收海域天氣惡劣,7m的浪高阻止回收船靠近著陸區域,在第一級最后著陸機動過程中也可能會造成一些麻煩。盡管如此,美國太空探索技術公司仍設法讓火箭第一級直立降落于海面,隨后駭浪損毀了箭體。美國太空探索技術公司回收了部分碎片,并拍攝了軟濺落過程視頻。火箭第一級成功著海是一個重要里程碑,標志著美國太空探索技術公司已達成獵鷹-9第一級助推返回能力的又一塊基石。
按美國太空探索技術公司的說法,標準獵鷹-9火箭的發射成本目前為5000萬~6000萬美元,推進劑本身的成本僅為其中的0.3%。如果能重復使用,火箭的資本成本則能降至1%。根據2014年繁忙的研制計劃,伊隆?馬斯克稱,有望在2014年底或2015年初實現火箭第一級的首次地面軟著陸,然后開始著力實施第一級的快速重用。
4 特色貨物
作為首艘由獵鷹-9v1.1火箭發射的“龍”飛船,除滿載1520kg加壓貨物外,還有2臺外部有效載荷和眾多內部物品。
“龍”飛船裝載了1臺G L A C I E R和2臺MERLIN實驗室冷凍箱,用于向站上運送科學樣品,并將返回2臺GLACIER和在軌獲取的珍貴樣品。針對站上進行的多項實驗/試驗,此次任務的特色貨物還包括高清晰度對地觀景(HDEV)裝置、激光通信光學有效載荷(OPALS)、蔬菜生產系統(VEGGIE)以及將給站上第二代“機器人航天員”安裝的一對機械腿。
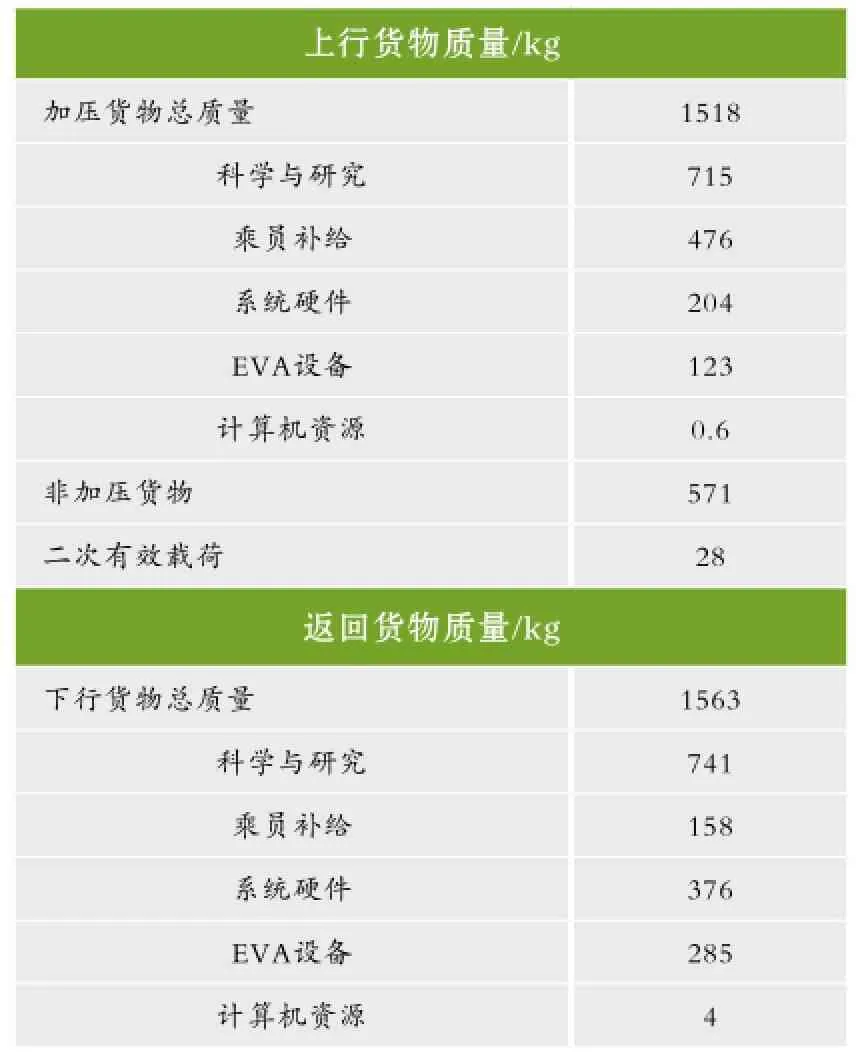
貨物質量分配
高清晰度對地觀景有效載荷
高清晰度對地觀景有效載荷由4臺市場可購的相機組成,將在近地軌道環境使用和下傳地球高清影像的過程中接受評估,可由科學家用于多種領域,也可通過在線直播平臺向公眾發布。所有高清晰度對地觀景硬件都封裝在外殼中,內充干燥氮氣保持大氣壓力。這四臺相機不具有云臺功能,每臺相機都有固定視場。高清晰度對地觀景有效載荷的主要目標是在空間環境中評估相機的長期性能,將有助于針對未來空間任務選擇商業部件。
激光通信光學有效載荷
通過從站上向位于J P L光通信望遠鏡實驗室(OCTL)的地面接收機傳輸視頻文件,激光通信光學有效載荷將演示驗證光通信技術在近地空間任務數據傳輸中的性能。
高清晰度對地觀景和激光通信光學有效載荷已相繼由加拿大臂-2和“靈巧專用機械手”安裝在空間站外部,公眾現可在線觀看高清晰度對地觀景拍攝并傳回的地球實時影像。
蔬菜生產系統
蔬菜生產系統是一種可展開的植物生長裝置,用于在站上驗證“太空花園”的可行性。試驗設施提供照明和養分供應,可支持栽培多種植物種類,將在乘員食用之前進行收割和研究。熱控制由站上艙內系統提供,而植物生長所需的二氧化碳源則是站上的環境空氣。裝置質量為7.2kg,允許的最大生長高度為45cm。測試物種為萵苣,將在兩種尺寸的煅燒粘土介質中栽培,以比較兩種介質區域中根系分布的情況。在太空中種植植物為乘員提供了新鮮食物,可補充飲食并對精神面貌和身體狀況產生正面影響。
“機器人航天員”的腿
在軌工作3年后,“機器人航天員”終于要有“腿”了。每條腿有7個關節以及1個充當腳的末端執行器,用于抓住空間站內外部的扶手。末端執行器還包括指引機器人接近和抓緊扶手所需的視覺系統。“機器人航天員”仍處于站上初期測試階段,而腿對于拓展測試活動而言是有益補充。
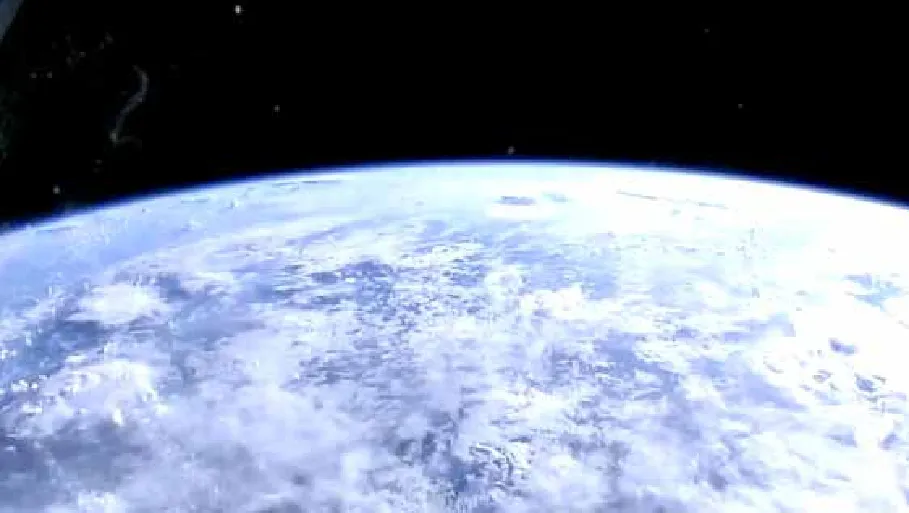
高清晰度對地觀景相機拍攝的地球高清實時影像
整件艙外活動航天服
此次“龍”飛船承擔了航天飛機退役后首次運送整件艙外機動裝置(EMU)往返于空間站的任務。盡管進步號、“自動轉移飛行器”、“H-2轉移飛行器”和“天鵝座”飛船都已用于運送EMU硬件,但都沒有運送過整件航天服。“龍”飛船運送的是艙外機動裝置-3003及其全部主要部件:硬式上肢組件、基本生命保障系統、頭盔、下肢組件及可替換硬件,包括手套和其他設備。為運送艙外機動裝置,“龍”飛船內部安裝了一個特制機柜。
除上述貨物外,第三次空間站補給任務還運送了包括5顆立方體衛星在內的二次有效載荷。這些立方體衛星由安裝在火箭第二級上的4臺“多微衛星軌道部署器”(P-POD)釋放,在船箭分離后不久部署在近地點315km、遠地點325km的軌道上。
5 結語
第三次空間站補給任務是美國太空探索技術公司“龍”飛船的第五次飛行任務,繼2010年12月首次短暫試飛成功后,在2012年5月完成驗證飛行任務,并先后于2012年10月和2013年3月完成兩次正式商業合同任務。第三次空間站補給任務成功表明美國太空探索技術公司的貨運飛船及運載火箭技術已穩定成熟,同時正大力開發可完全重用的火箭技術。
美國太空探索技術公司和美國航空航天局今年計劃共發射三艘“龍”飛船,,2015年發射四艘,2016年發射最后一艘。但根據此次任務遭遇的各種推遲判斷,后續進度也會受到影響。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
