基于TMS320F2812的永磁同步電動機矢量控制系統設計
2014-03-16 09:23:22吳一鳴劉景林
電子設計工程 2014年10期
關鍵詞:信號
吳一鳴,劉景林
(西北工業大學 陜西 西安 710072)
這些年來,由于集成電路與計算技術的發展,同時伴隨著耐熱性及磁性能較高的稀土永磁體的發明與應用,越來越多結構簡單的永磁同步電動機矢量控制器被廣泛應用于機器人及數控機床等領域。眾所周知,永磁同步電動機擁有這幾個特點:損耗低、體積小、重量輕、運行較為可靠、結構簡單、功率因數高[1-2],在一些對精度、動態性能及體積限制要求較高的場合,永磁同步電動機(PMSM)伺服控制系統相對于其他類型電機的控制系統有明顯的優勢。本文主要介紹以TMS320F2812為核心的永磁同步電動機矢量控制系統。
1 永磁同步電動機矢量控制策略
1.1 永磁同步電動機數學模型
眾所周知,永磁同步電動機的定子是三相對稱繞組。通常,我們按照電動機慣例對各物理量的正方向進行規定。
在建立數學模型之前,我們需做出以下幾個假設[3]:
1)轉子上永磁體產生的空間磁場分布為正弦波,同時,在定子電樞繞組中所感應的電動勢也為正弦波;
2)假定磁路線性,這時我們需要忽略定子鐵心的飽和現象,此外,定子繞組的電感參數不變;
3)忽略鐵芯的渦流與磁滯等損耗;
4)轉子內沒有嵌放阻尼繞組。
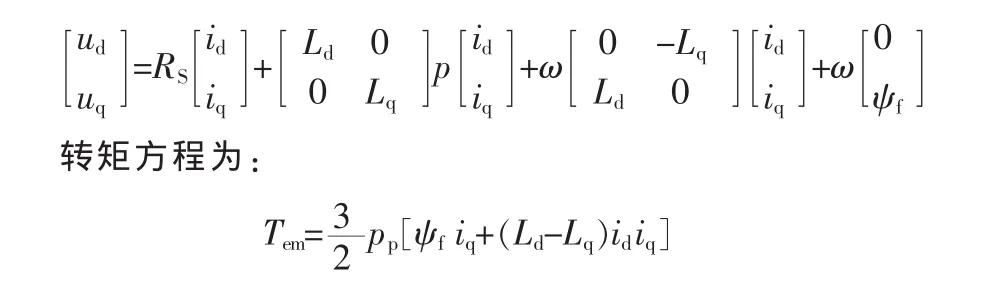
經過Clarke和Park坐標解耦變換,我們可以得到永磁同步電動機的電壓方程為:
1.2 矢量控制策略
從圖1可以看出,這是一個電流內環、轉速外環的雙閉環系統[4]。要實現永磁同步電動機的矢量控制策略,首先,需通過相電流檢測電路提取iA,iB,經過Clark變換將它們轉換到兩相靜止坐標系中,計算出iα和iβ,由 Position Sensor的反饋值θ計算出sinθ和cosθ,進行Park變換,將它們轉換到旋轉坐標系中,從而計算出id和iq;之后,根據檢測到的電機轉速和輸入的參考轉速誤差,利用轉速和轉矩的關系,通過轉速控制器ASR計算得到定子電流iq的參考輸入iqref;然后將id、iq分別與參考輸入idref、iqref相比較,誤差在通過電流控制器ACR的計算后, 得到 Vd、Vq的參考值 Vdref、Vqref; 最后, 通過Park逆變換得到Vαref和 Vβref,由 SVPWM模塊輸出的 PWM 波來控制三相逆變器,從而控制定子三相對稱繞組的電流。永磁同步電動機矢量控制系統的原理圖如圖1所示。
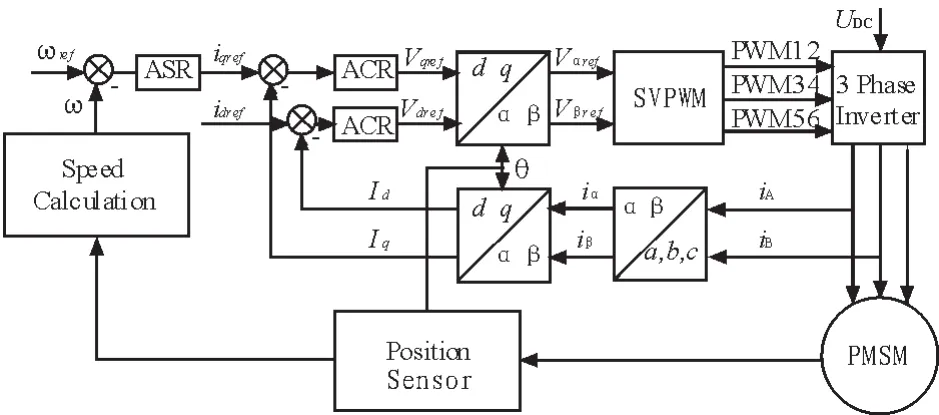
圖1 永磁同步電動機矢量控制原理框圖Fig.1 Layout of the vector control system of PMSM
2 硬件設計
2.1 硬件總體結構
本系統硬件構成框圖如圖2所示,主要包含控制板、功率驅動板和輔助電源板3大部分。整個控制器以TMS320F2812芯片為核心再配以簡單的外圍電路,系統的速度控制和電流控制功能均采用軟件實現。
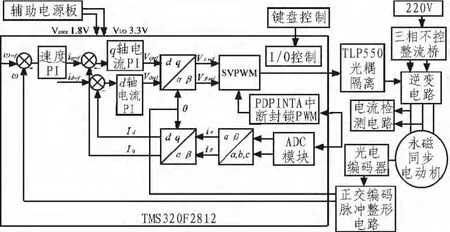
圖2 永磁同步電動機矢量控制系統硬件總體結構框圖Fig.2 Block diagram of the hardware of the control system
2.2 數字控制單元模塊
TMS320F2812系列DSP被大家所熟知,它是一種32位的定點數字信號處理器,同時,由于它整合了DSP和MCU的最佳性能,使得在它在一個周期內即可完成一個32×32位乘法運算,或者兩個16×16位乘法運算。此外,由于快速終端管理單元也被集成在DSP內,這樣就會使得終端的輸入延時大幅減小,可以更佳地滿足實施控制的需求。由于2812系列DSP具有較高的性能,它可以在一個周期時間內完成對任一內存或地址的寫入、修改或讀取等操作,而且它自身還集成有多個缺省指令集,這些指令一方面可以使得程序開發變得更加簡單,另一方面還提高了程序執行時的效率[5-6]。
2.3 電流檢測電路
對于三相永磁同步電動機來說,當三相電流沒有零序分量時(當電動機三相繞組是星形連接而中點不外接時此條件即可滿足),由于iA+iB+iC=0,只要需將其中任意兩路電流進行采樣,即可得到全部三相電流的值。電流采樣應用霍爾元件來采樣主回路的信號,這個控制系統中選用的傳感器型號為LA28-NP。TMS320F2812的芯片內部包含A/D轉換模塊,采樣部分共有16路通道,轉換最小時間為60 ns,然而由于其A/D轉換模塊所需輸入為單極性 [0~3 V],故需要將從LEM輸出的電壓信號轉換成 [-1.5~+1.5 V]電壓信號。然后再經過+1.5 V的偏移將其提升至[0~3 V]范圍內,才可為DSP所接受,之后輸入到12位的A/D轉換器中,獲得電機的實際電流值。本系統設計有二級管組成的限幅電路,防止電壓過高或過低。電流檢測電路如圖3所示。
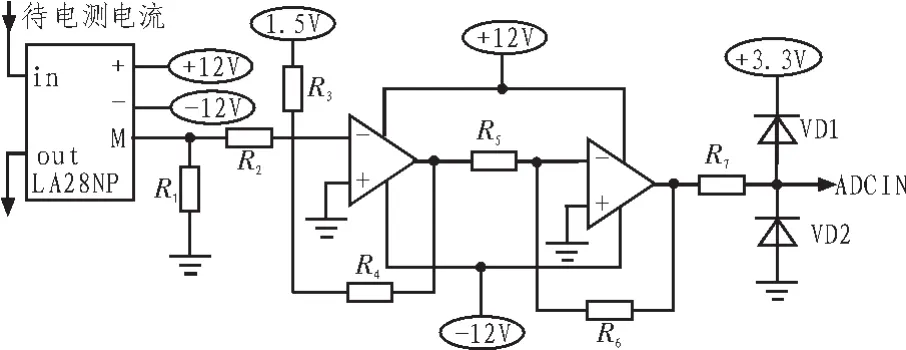
圖3 電流檢測電路Fig.3 Layout of the current sense circuit
2.4 機械位置檢測模塊
該模塊可以將增量式光電編碼器送過來的脈沖信號轉換為轉子軸的絕對機械位置,之后,其絕對的機械位置被存放在變量θm中。通過轉子的一個已知位置,根據增量式光電編碼器的數值就可以得到轉子軸的絕對機械位置。
電動機每旋轉一周,接收端就會產生1 024個脈沖,每個縫隙有4個邊緣,2個通道各有1個上升沿和1個下降沿。即電動機每旋轉一周,QEP就會檢測到4 096個邊沿數。QEP通過檢測2個通道的先后次序,從而對轉子轉向進行判斷。邊沿數存儲在T3CNT中,根據所選旋轉的方向來確定T3CNT是增量式還是減量式。一旦選定了QEP模式,當T3計數器值超過FFFFh時,T3歸零并重新計數。
光電編碼器有A、B、Z三路輸出信號,其中A、B兩路信號的相位相差90°,Z信號又被稱為零位信號,是每轉輸出一個脈沖的零位參考信號,光電編碼器輸出的三路脈沖信號在經過光電隔離和脈沖整形之后即直接送入DSP的QEP/捕獲單元引腳。高速光耦(TLP550)用來實現數字電路和模擬電路的隔離,高速反相器(74HC14)用來對輸入脈沖信號進行整形,脈沖整形電路如圖4所示。

圖4 脈沖整形電路Fig.4 The interface circuit of the optical encoder
2.5 電源供電電路
與一般的DSP不同,2812的上電次序是外圍先上電,內核后上電,即3.3 V先上電,1.8 V后上電,TPS767D318本身并不具備自動控制3.3 V與1.8 V上電時序的功能,但是它為3.3 V和1.8 V各提供了一個使能引腳,可以分別使能。這是一個可以利用的途徑。將3.3 V的使能引腳使能(接地),則上電時3.3 V正常啟動。將3.3 V通過R1R2兩個電阻合理分壓后,驅動一個MOSFET(BSS138)的門極,如圖 5中電路所示,1.8V的使能引腳被一個10 kΩ電阻上拉,當3.3V上電后,MOSFET導通,1.8 V的使能引腳才被拉低而使能。這樣就保證了1.8V慢于3.3V而上電。即,外圍3.3V先上電,內核1.8V后上電。
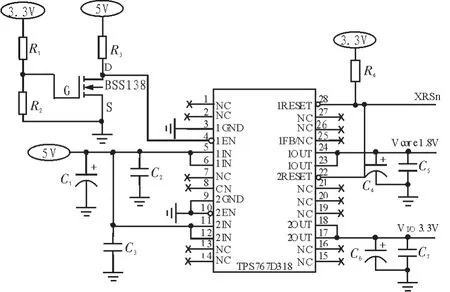
圖5 電源供電電路Fig.5 The layoutof power supply of TMS320F281
3 系統軟件設計
本系統采用DSP2812數字處理器作為核心控制芯片,該芯片主頻高達150 mHz,滿足控制系統需求。系統軟件主要包括主程序、中斷處理子程序和捕捉中斷處理子程序3個部分。主程序在工作周期內不斷地循環采樣參考給定,如有中斷發生,它會立即停止循環采樣并對中斷進行相應;定時器的中斷處理子程序是整個控制系統中最核心的部分,系統的閉環控制計算及PWM波的輸出任務都由它來完成,它在每一個PWM周期完成時進行一次電流環的采樣和控制 (對速度環的采樣控制周期為10個PWM波),然后在一個PWM周期剩下的時間內空循環;本系統有兩個捕獲中斷:CAP3_ISR和CAP6_ISR,捕獲中斷3用來捕獲光碼盤的正交編碼脈沖信號,然后進行T法測速,之后便于進行速度顯示,Z脈沖信號可以觸發捕獲中斷6,它用來矯正角度計算的基準值和初始位置角θ0。主程序、定時器中斷程序和捕獲中斷程序的框圖如圖6所示。
4 仿真及實驗研究
首先,根據實驗室內一臺5.5 kW的內嵌式永磁同步電動機的電氣參數在Matlab中搭建其模型,以額定轉速3 000 r/m in進行啟動升速,大約在2.2 s左右即可穩定在額定轉速,穩速后,在3 s時加載額定轉矩17.5 Nm。從圖中可以看到加載時及之后轉速較為平穩,一直穩定在3000±30 r/min。可以看出,永磁同步電機矢量控制系統具有較好的動態響應特性和速度控制特性。轉速圖如圖7所示。
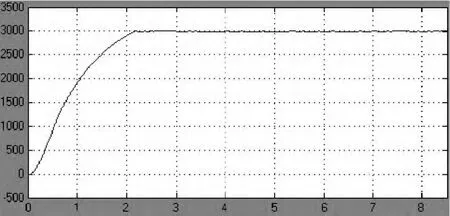
圖7 額定帶載下的轉速-時間曲線Fig.7 The relationship between n and t under rated condition
之后,選取該樣機利用加載臺對其進行額定狀態下的加載測試,該電機定子三相電流如圖8所示,其中,電流鉗選取10 mV/A檔位,示波器每格對應電流50 A,可以觀測到三相電流峰值約為25 A,此外,可以看出三相電流波形正弦度較好,說明電機額定帶載運行很平穩,控制器滿足實際要求。
5 結束語
文中在簡要介紹了永磁同步電動機的數學模型基礎上,分析了永磁同步電動機的矢量控制原理及控制方法,重點介紹了TMS320F2812處理器的特點,詳細敘述了控制系統的硬件構成,另外對此控制系統的軟件設計進行了介紹,最后利用5.5 kW的樣機對該控制系統進行了測試,實驗表明此控制系統有較高的動態響應特性,電機帶載時運行平穩,電流波形正弦度較好,控制器滿足實際需求。
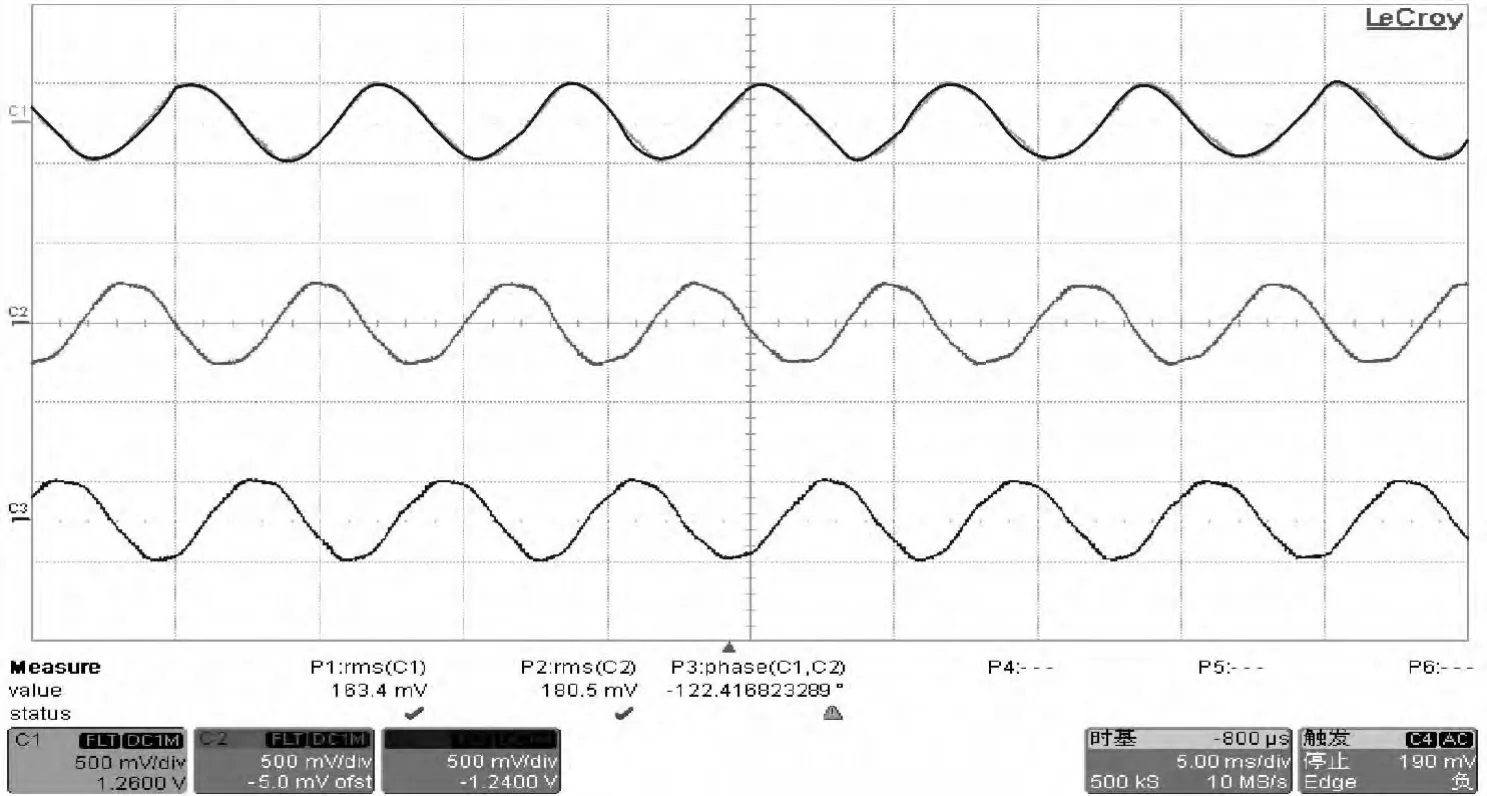
圖8 額定加載下的三相電流波形Fig.8 Figure of the three phase current under rated condition
[1]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997.
[2]李崇堅.交流同步電機調速系統[M].北京:科學出版社,2006.
[3]陳榮,鄧智泉,嚴仰光.永磁同步伺服系統電流環的設計[J].南京航空航天大學學報,2004,36(2):220-225.CHEN Rong,DENG Zhi-quan,YAN Yang-guang.Design of current control loop for permanentmagnet synchronous servo system[J].Journal of Nanjing University of Aeronautics&Astronautics,2004,3(2)6:220-225.
[4]董恒,王輝,黃科元.永磁同步電動機驅動系統數字PI調節器參數設計[J].電氣傳動,2009,39(1):6-9.DONG Heng,WANG Hui,HUANG Ke-yuan.Design of PMSM drive system digital PIadjuster parameters[J].Electric Drive,2009,39(1):6-9.
[5]蘇奎峰,蔡昭權,呂強,等.TM S320F281x DSP應用系統設計 [M].北京:北京航空航天大學出版社,2008.
[6]蘇奎峰,呂強,耿慶峰,等.TMS320F2812原理與開發[M].北京:電子工業出版社,2005.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
