基于西門子Simatic Manager平臺(tái)的冷軋板形控制神經(jīng)網(wǎng)絡(luò)效率自學(xué)習(xí)的實(shí)現(xiàn)及效果
2014-03-16 09:26:38包頭鋼鐵集團(tuán)薄板坯連鑄連軋廠自動(dòng)化部
電子世界 2014年9期
關(guān)鍵詞:效率
包頭鋼鐵集團(tuán)薄板坯連鑄連軋廠自動(dòng)化部 周 鑫
西門子Simatic Manager軟件是西門子公司開(kāi)發(fā)的自動(dòng)化控制軟件。使用STEP7組態(tài)工具進(jìn)行圖形化組態(tài):連續(xù)功能圖(CFC)和順序功能圖(SFC)。控制器硬件平臺(tái)使用西門子裝有64位CPU的TDC控制器,TDC(Techonlogy and Drive Control)是工藝和驅(qū)動(dòng)自動(dòng)化系統(tǒng)的簡(jiǎn)稱。該系統(tǒng)具有模塊化的系統(tǒng)結(jié)構(gòu),硬件可擴(kuò)展。采樣時(shí)間間隔短,可達(dá)100sμ,特別適用動(dòng)態(tài)控制任務(wù)。中央處理器采用64位結(jié)構(gòu),可同步多處理器運(yùn)行,而且具有分時(shí)多任務(wù)功能,可將運(yùn)行任務(wù)分派到不同的時(shí)間片內(nèi)運(yùn)行。由于平直度控制涉及大量高實(shí)時(shí)性的運(yùn)算,所以單獨(dú)使用一個(gè)雙64位CPU的處理單元。
CFC編程工具是標(biāo)準(zhǔn)的圖形編程環(huán)境,具有強(qiáng)大的功能和使用便捷性,在設(shè)計(jì)時(shí)遵循模塊化設(shè)計(jì)的理念,有非常豐富的功能模塊,如位控邏輯、數(shù)學(xué)運(yùn)算、通訊功能、輸入輸出通道、內(nèi)存管理、特殊的數(shù)據(jù)處理、物料追蹤處理、控制傳動(dòng)模塊等。但對(duì)于平直度控制,由于其標(biāo)準(zhǔn)庫(kù)并沒(méi)有相應(yīng)的功能模塊,所以必須先開(kāi)發(fā)。然后將控制功能封裝成標(biāo)準(zhǔn)模塊,在CFC編程環(huán)境中調(diào)用。在Simatic Manager平臺(tái)上,將NNI神經(jīng)網(wǎng)絡(luò)初始化、NNI自學(xué)習(xí)效率、從NNI中獲取效率以及計(jì)算執(zhí)行機(jī)構(gòu)設(shè)定值等功能實(shí)現(xiàn)后,封裝到功能庫(kù)fbaflc中,在西門子Simatic Manager開(kāi)發(fā)平臺(tái)的CFC軟件設(shè)計(jì)工具中調(diào)用,以完成控制功能。
1.平直度神經(jīng)網(wǎng)絡(luò)控制結(jié)構(gòu)
圖1-1所示為平直度神經(jīng)網(wǎng)絡(luò)控制詳細(xì)結(jié)構(gòu)框圖。NNI為系統(tǒng)辨識(shí)器,用于識(shí)別執(zhí)行機(jī)構(gòu)改善的平直度偏差;Y為平直度檢測(cè)值,Ysr為平直度設(shè)定值;Y及Ysr均為包含80個(gè)元素的向量。Δσ為當(dāng)前的平直度偏差;Δiσ為前次激活控制時(shí)的平直度偏差;Nσ為NNI辯識(shí)的該執(zhí)行機(jī)構(gòu)能夠改善的平直度偏差;P-P為先驗(yàn)的執(zhí)行機(jī)構(gòu)效率,是80個(gè)元素的向量;F為當(dāng)前的軋制力;W當(dāng)前軋制板帶的寬度;LP為執(zhí)行機(jī)構(gòu)的實(shí)際位置變化;g和P分別為平直度偏差加權(quán)因子和執(zhí)行機(jī)構(gòu)在板帶寬度方向上的效率,均為包含80個(gè)元素的向量。NCC為用數(shù)學(xué)方法構(gòu)成的控制器,向執(zhí)行機(jī)構(gòu)發(fā)出最優(yōu)設(shè)定值。E1為實(shí)際改善的平直度偏差,E為網(wǎng)絡(luò)辨識(shí)值輸出與實(shí)際期望值之間的偏差,用于訓(xùn)練網(wǎng)絡(luò)。

圖1 -1 平直度神經(jīng)網(wǎng)絡(luò)控制詳細(xì)結(jié)構(gòu)框圖
1.1 執(zhí)行機(jī)構(gòu)效率
因?yàn)槠街倍葴y(cè)量和第五架軋機(jī)之間存在著空間距離,所以必須預(yù)先計(jì)算出執(zhí)行機(jī)構(gòu)改善板形的能力。執(zhí)行機(jī)構(gòu)效率是指執(zhí)行機(jī)構(gòu)改善板形的能力,其數(shù)學(xué)公式為其中Niσ,為神經(jīng)網(wǎng)絡(luò)NNI計(jì)算的執(zhí)行機(jī)構(gòu)能夠改善的板帶寬度方向上第i位置的平直度偏差,U為在改善了Niσ偏差時(shí)的執(zhí)行機(jī)構(gòu)輸出值。因?yàn)樵诎鍘挾确较蛏瞎矂澐至?0個(gè)區(qū)域,所以執(zhí)行機(jī)構(gòu)效率是一個(gè)包含80個(gè)元素的向量。pi并不是網(wǎng)絡(luò)的直接輸出,是在網(wǎng)絡(luò)輸出的基礎(chǔ)上計(jì)算出來(lái)的。執(zhí)行機(jī)構(gòu)效率送入NCC用于計(jì)算執(zhí)行機(jī)構(gòu)的最優(yōu)設(shè)定值。[2]
1.2 NNI效率自學(xué)習(xí)算法
執(zhí)行機(jī)構(gòu)效率辯識(shí)器NNI采用的是BP算法下面介紹NNI的特征函數(shù)和改進(jìn)的權(quán)值調(diào)節(jié)方法。
(1)特征函數(shù)。特征函數(shù)取S型函數(shù),即:
F(x)=1/(1+e-x)
(2)改進(jìn)的權(quán)值調(diào)節(jié)算法
網(wǎng)絡(luò)采用的BP算法是前向計(jì)算輸出和反向誤差傳播的權(quán)值調(diào)節(jié)過(guò)程。設(shè)網(wǎng)絡(luò)中第I層某個(gè)神經(jīng)元i與后一層第J層的連接權(quán)值為wij,對(duì)節(jié)點(diǎn)i來(lái)說(shuō),設(shè)輸入為xi,輸出為xi,xj為后一層中節(jié)點(diǎn)j對(duì)第I層神經(jīng)元1的輸入。由圖1-1可得:

誤差反傳用改進(jìn)的Delta權(quán)值調(diào)整公式:

式中:η為學(xué)習(xí)率(取η=0.1-0.9);α為動(dòng)量系數(shù)(取α=0.1-0.8);jδ為神經(jīng)元輸出誤差。[3]
2.執(zhí)行機(jī)構(gòu)效率自學(xué)習(xí)NNI的實(shí)現(xiàn)
2.1 執(zhí)行機(jī)構(gòu)自學(xué)習(xí)效率的獲取
執(zhí)行機(jī)構(gòu)效率在神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)作用下,逐步得到改善。但是,在CFC軟件內(nèi)怎樣取得效率呢?FBAFLC模塊庫(kù)提供了幾個(gè)此類模塊,用來(lái)完成這類任務(wù)。這個(gè)過(guò)程分為兩步,第一步,從NWA和NWE指向的數(shù)據(jù)區(qū)取得所有執(zhí)行機(jī)構(gòu)的效率,第二步,根據(jù)執(zhí)行機(jī)構(gòu)數(shù)目和每個(gè)執(zhí)行機(jī)構(gòu)效率的離散點(diǎn)數(shù)目取得每個(gè)執(zhí)行機(jī)構(gòu)的效率。上述第一步如圖2-1所示。上述第二步如圖2-2所示。

圖2 -1 根據(jù)類型取得所有執(zhí)行機(jī)構(gòu)效率

圖2 -2 取得某個(gè)執(zhí)行機(jī)構(gòu)效率
在圖2-1中,通過(guò)功能塊AEGET獲得所有執(zhí)行機(jī)構(gòu)的效率,當(dāng)輸入端TRG激活為1時(shí),觸發(fā)此功能塊。輸入PRM是一個(gè)向量指針,該向量有兩個(gè)元素:當(dāng)前獲取效率板帶的寬度和軋制力類型。NWA和NWL是指向所有執(zhí)行機(jī)構(gòu)效率的指針。EFA輸出為指向所有執(zhí)行機(jī)構(gòu)先驗(yàn)效率的指針,EFL輸出為指向所有執(zhí)行機(jī)構(gòu)自學(xué)習(xí)效率的指針。V2S20模塊輸出首地址為VX輸入,而偏移值從FE開(kāi)始的20個(gè)向量元素值。其中離線和在線參數(shù)是指:當(dāng)前正在軋制的板帶類型參數(shù)是手工通過(guò)HMI輸入的還是接收二級(jí)系統(tǒng)設(shè)定的。
功能塊M2V從輸入端MX指向的向量空間取得各個(gè)不同執(zhí)行機(jī)構(gòu)的效率向量,此效率向量的元素?cái)?shù)目為80,并將向量地址輸出到VY2-VY8上。它的輸入MX是圖2-1中的AEGET的輸出EFA或EFL,根據(jù)從HMI上選擇是使用先驗(yàn)效率還是學(xué)習(xí)效率,將AEGET的輸出EFA或EFL連接到此處。圖中NOP8塊將輸入發(fā)送到輸出。
2.2 執(zhí)行機(jī)構(gòu)效率自學(xué)習(xí)的實(shí)現(xiàn)
執(zhí)行機(jī)構(gòu)效率自學(xué)習(xí)的實(shí)現(xiàn)也是通過(guò)在CFC軟件設(shè)計(jì)工具中調(diào)用封裝的學(xué)習(xí)算法模塊實(shí)現(xiàn)的。如圖2-3所示。

圖2 -3 執(zhí)行機(jī)構(gòu)效率的自學(xué)習(xí)
在圖2-3中,AELERN模塊實(shí)現(xiàn)了平直度執(zhí)行機(jī)構(gòu)效率的自學(xué)習(xí),它內(nèi)部封裝了BP網(wǎng)絡(luò)的學(xué)習(xí)過(guò)程。當(dāng)觸發(fā)端TRG的輸入為1時(shí),激活自學(xué)習(xí)功能。PRM為包含兩個(gè)元素向量,表明當(dāng)前學(xué)習(xí)執(zhí)行機(jī)構(gòu)效率時(shí)的板帶寬度和軋制力。DS為指向執(zhí)行機(jī)構(gòu)位置變化向量的指針,LDT為指向平直度變化向量的指針。VLN為執(zhí)行機(jī)構(gòu)效率自學(xué)習(xí)速度,在此處經(jīng)過(guò)調(diào)試設(shè)定為0.5。而自學(xué)習(xí)使用的執(zhí)行機(jī)構(gòu)最優(yōu)值通過(guò)內(nèi)部數(shù)據(jù)結(jié)構(gòu)獲得。TDH是一個(gè)向量指針,通過(guò)它可以在程序內(nèi)部查看學(xué)習(xí)效率,如圖2-3中的DIS020模塊。但更重要的是,它是一個(gè)內(nèi)部使用的全局?jǐn)?shù)據(jù)指針,指向執(zhí)行機(jī)構(gòu)效率學(xué)習(xí)初始化模塊AECONF的MWA和MWL數(shù)據(jù)區(qū)。所以在開(kāi)發(fā)CFC軟件時(shí),必須注意AECONF和AELERN之間的一一對(duì)應(yīng)的關(guān)系和他們的唯一性。通過(guò)平直度的變化和執(zhí)行機(jī)構(gòu)的位置,AELERN模塊自學(xué)習(xí)對(duì)應(yīng)板帶寬度和軋制力類的執(zhí)行機(jī)構(gòu)效率,并把他們寫入TDH指向全局?jǐn)?shù)據(jù)區(qū)的對(duì)應(yīng)位置。
3.平直度控制效果及總結(jié)
圖3-1所示的兩幅圖為經(jīng)過(guò)神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)進(jìn)行辨識(shí),控制執(zhí)行機(jī)構(gòu),不斷改善的板形質(zhì)量對(duì)比,顏色越深為板形質(zhì)量越不好的區(qū)域。可見(jiàn)板形質(zhì)量得到了明顯改善,但從第二幅圖目前的板形質(zhì)量圖可以看出帶鋼邊部板形仍存在較大缺陷,所以板形的神經(jīng)網(wǎng)絡(luò)控制仍有提高精度的潛力。
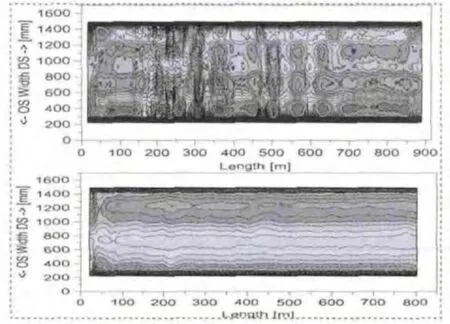
圖3 -1 帶鋼板形質(zhì)量改善情況對(duì)比
帶鋼平直度偏差經(jīng)過(guò)計(jì)算分析,可以表現(xiàn)為以下幾種(這幾種因素可能同時(shí)存在)。
(1)偏差值呈由大到小(或由小到大)順序的線性分布;(2)偏差值呈兩邊對(duì)稱的二次曲線分布;(3)偏差值呈對(duì)稱的四次曲線分布;(4)非對(duì)稱的局部偏差值。
支撐輥壓下傾斜僅影響平直度偏差的線性部分。中間輥的軸向竄動(dòng)影響平直度偏差的二次曲線部分。而彎輥系統(tǒng)主要影響平直度偏差的四次曲線部分,這主要是因?yàn)閺澼佌{(diào)節(jié)時(shí),對(duì)帶鋼的邊緣影響要比中間大的多。工作輥多區(qū)冷卻影響不對(duì)稱的局部的平直度偏差,但多區(qū)冷卻由于熱傳導(dǎo)的滯后性,所以控制結(jié)果在秒級(jí)才能生效,因而在設(shè)計(jì)它的控制器時(shí)將采用PI調(diào)節(jié)器。
采用神經(jīng)網(wǎng)絡(luò)控制方法對(duì)冷軋板形進(jìn)行控制,較好的實(shí)現(xiàn)了控制精度和效果。
[1]Flantness Control FLC System Reference Manual for Cont.Pickling Line&Tandem Mill[Z].Section 5.3.3.10.2004:1-128.
[2]周鑫.五機(jī)架CVC冷軋機(jī)板形檢測(cè)與神經(jīng)網(wǎng)絡(luò)控制[D].內(nèi)蒙古工業(yè)大學(xué)工程碩士學(xué)位論文,2008.
[3]徐麗娜.神經(jīng)網(wǎng)絡(luò)控制[M].北京:電子工業(yè)出版社,2003:55-72.
猜你喜歡
瘋狂英語(yǔ)·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經(jīng)濟(jì)(2017年6期)2017-07-12 09:27:16
中國(guó)衛(wèi)生(2016年9期)2016-11-12 13:27:54
時(shí)代英語(yǔ)·高二(2015年1期)2015-03-16 00:08:11
中國(guó)洗滌用品工業(yè)(2015年7期)2015-02-28 19:02:38
電子設(shè)計(jì)工程(2015年12期)2015-02-27 12:06:10
中國(guó)衛(wèi)生(2014年11期)2014-11-12 13:11:32