車箱對接裝置的設計
2014-03-16 07:55:54王寧虎申慧芳
環境衛生工程 2014年1期
關鍵詞:設備
王寧虎,申慧芳,鞏 敏
(長治清華機械廠技術中心,山西 長治 046012)
目前垃圾轉運站的垃圾壓縮設備有水平壓縮和垂直壓縮等形式,其中水平垃圾壓縮設備運行過程中的一個重要環節是密封垃圾車箱與垃圾壓縮設備的對接[1-2]。車箱橫移平臺、縱移裝置是實現車箱與垃圾壓縮設備準確位移、對接功能的裝置,在各種形式的水平壓縮垃圾站中都有使用。借鑒傳統的車箱對接形式將車箱橫移平臺、縱移裝置設計為一體的獨立設備,能解決目前垃圾站車箱移動中出現的一些問題,提高垃圾轉運設備的運行效率。
1 車箱對接裝置結構形式及工作原理
1.1 車箱對接裝置結構形式
對接裝置主要由縱移機構和橫移機構等組成;由液壓系統提供動力,電氣系統執行自動和手動控制。液壓動力單元安裝于對接裝置上,電氣系統由垃圾站電氣部分統一控制。
車箱對接裝置的具體形式及主要組成部分見圖1。
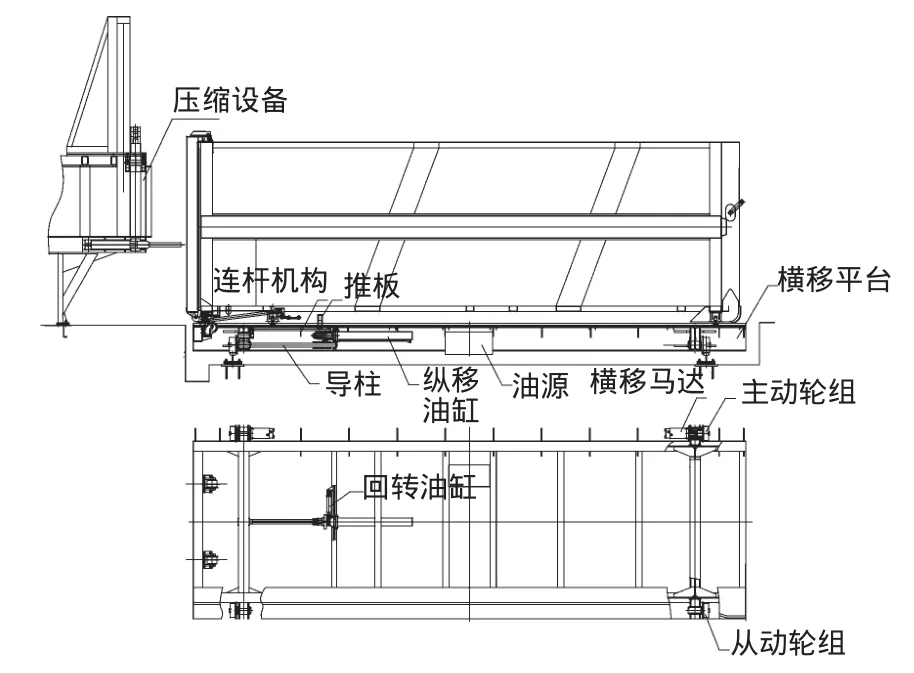
圖1 車箱對接裝置
1.2 工作原理
車箱對接裝置是將縱移機構和橫移平臺設計為一個整體;垃圾轉運車(自卸式垃圾車)將垃圾箱放置在橫移平臺上,橫移平臺由橫移液壓馬達驅動將垃圾箱橫移至壓縮腔卸料口處,由橫移上的縱移機構將垃圾箱與垃圾壓縮設備對接,回轉油缸將推板與垃圾箱連接,由縱移油缸驅動垃圾箱往復運動,實現垃圾箱和壓縮機的對接和分離。待垃圾箱(自卸式垃圾車或車廂可卸式垃圾車)裝滿垃圾后由縱移機構將垃圾箱移動至橫移平臺上,由橫移平臺將垃圾箱移至空位,由垃圾轉運車將垃圾箱運走,整套設備一個工作循環完成。
2 對接裝置技術設計
2.1 橫移平臺
橫移平臺由架體、輪組、支撐架等主要部件組成。架體主要采用鋼板和矩形鋼管,采用框架式結構,在保證結構件強度的同時盡量減輕質量。縱移機構結構緊湊,置于架體內實現車箱的縱移,簡化了機構,提高整體的性能,降低了成本。
橫移平臺主要結構件(橫梁)的確定如下。
材料選用Q235A矩形鋼管,橫梁受力如簡支梁形式,受力見圖2。圖2中A-A截面為危險截面。

圖2 梁受力示意
式中:M為彎矩;Wx為抗彎截面模量;P為載荷。
再考慮k=1.1(動載超載10%),φ動載系數(取 φ=1.2),則 σmax=kφσ 。
η>2,滿足橫移平臺主要結構件安全性能。
2.2 縱移機構
縱移機構安置在橫移平臺的支撐梁上,將垃圾箱與垃圾壓縮設備進行對接,縱移機構由推板、連桿機構、導柱、縱移油缸和回轉油缸等組成,回轉油缸將推板與垃圾箱連接,由縱移油缸驅動推板沿著導桿往復運動使垃圾箱縱向位移,實現垃圾箱和壓縮機的對接和分離。
縱移油缸缸徑的確定如下。
根據縱移機構的推(拉)力和運動要求,對接裝置載重量為W1(kN),加上車箱及對接裝置的重量W2(kN),總重量約為W(kN)=W1+W2。滾動摩擦因數(鋼對鋼)為0.05。縱移油缸的推(拉)力應為:F≥(W1+W2)×0.05。液壓系統壓力為P(MPa),初步確定縱移油缸的缸徑為D(mm)=根據缸徑確定活塞桿徑(速比1∶2)為d(mm)。
2.3 橫移機構
橫移機構由橫移液壓馬達驅動橫移平臺沿導軌相對垃圾壓縮設備作橫向運動,將垃圾箱橫移至壓縮腔卸料口處,待垃圾箱裝滿垃圾后由縱移機構將垃圾箱移動至橫移平臺上,由橫移平臺將垃圾箱移至空位。
橫移液壓馬達的確定如下。
1) 液壓馬達的扭矩。
對接裝置載重量為W1(kN),加上車箱及對接裝置的重量W2(kN),總重量W=W1+W2。滾動摩擦因數(鋼對鋼)為μ。則每個馬達驅動輪推力F1最小為:F1=W/2×μ。
初步確定驅動輪直徑為D,則液壓馬達輸出扭矩T應滿足:
T=1.3×W/2×μ×D/2 (Nm)。
2)液壓馬達的轉速。
對接裝置要求橫移速度為v(m/s),則液壓馬達輸出轉速:
驅動輪每轉的行程πD(m/r)。
橫移速度為V(m/s)×60=V1(m/min)
驅動輪的轉速應為n=V1/D×π(r/min)。
選取液壓馬達輸出轉速為n(r/min)。
3)液壓馬達的確定。
根據橫移平臺的運動要求,按液壓馬達廠商提供的產品樣本。在同時滿足輸出扭矩和輸出轉速的條件下,配流盤擺線液壓馬達(OMT系列)較為適合。
2.4 液壓系統設計
液壓系統為橫移平臺、縱移機構等提供動力,液壓控制回路。其工作原理如下:
縱移轉換油缸——油泵從油箱吸油(經過油濾),油液通過單向閥流過換向閥、液壓鎖、單向節流閥為縱移轉換油缸提供動力,使油缸往復運動,油缸活塞桿通過轉換機構連接縱移推板,使縱移推板抬起、落下以實現縱移機構與垃圾箱的聯接。
縱移油缸——油泵從油箱吸油(經過油濾),油液通過單向閥流過換向閥、單向節流閥為縱移油缸提供動力,使油缸往復運動,油缸活塞桿連接縱移推板推動垃圾箱實現與壓縮設備的對接、分離。
橫移馬達——油泵從油箱吸油(經過油濾),油液通過單向閥流過換向閥、液壓鎖、單向節流閥為橫移馬達提供動力,橫移馬達旋轉帶動輪組轉動使橫移平臺移動,實現垃圾箱量FG通過以下方法測定:將分選物料單層均勻擺開放置在地面指定區域(1 m2)內,直至指定區域看不見地面為止,然后將物料稱重,得出100%的帶寬物料分布率下的單位面積質量。部分分選處理物料的處理能力測定結果見表1。

表1 部分分選處理物料的處理能力測定結果
5 光電智能分選系統的應用
UniSort P4000型光電智能分選系統應用主副機技術,設備有效分選寬度4 000 mm,專為衍生替代輔助燃料(RDF)分選設計,同時適用于其他廢物的分選,能夠滿足目前和將來各種廢物料的分選,處理能力大,功能多,操作方便,運行可靠。設備可以很容易地進行手動或通過設備總控系統自動切換分選物料種類要求,同時實現遠程操作控制和診斷維護。能夠處理單位面積質量小的輕物料(如紙類和薄膜的分選),性價比很高。
經過智能分選后RDF熱值為16 000~25 000 kJ/kg,有利于提高垃圾發電的規模和效益,比用原生垃圾焚燒發電,效率提高25%~35%,使大規模的熱能循環利用成為可能;RDF經分選、脫氯(PVC含量小于0.3%~0.7%)、脫硫處理,可大大減輕煙氣對設備的腐蝕,煙氣和灰渣比原生垃圾焚燒時減少2/3,煙氣中的重金屬、氯化合物、二惡英呋喃等含量遠低于歐盟有關標準,減少了相關處理設備的投資。生活垃圾在水泥窯、電廠、RDF焚燒廠摻燒處理拓展了垃圾處理途徑和提高了能源綜合利用率,具有良好的環境效益和社會經濟效益。
6 結束語
在固體廢物資源化綜合利用中,近紅外線NIR智能分選系統技術不僅可用于生活垃圾處理分選設備中可回收物按照物料材質、顏色的精細分選,還可用于在各種垃圾分選預處理中按照材質、顏色分選各種塑料類、紙類、木頭類等可回收物分類分選。該系統能夠提高資源循環利用的附加值,特別是主副機技術的應用,提高了設備的性價比,能滿足大處理能力的需求。在垃圾轉化能源生產RDF過程中,應用該技術能夠去除雜質聚氯乙烯(PVC),從源頭降低二惡英產生的可能性,減少鹽酸對設備的腐蝕,最大限度實現資源化。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00