數控轉塔沖床上下料助力機械手設計與分析
2014-03-17 01:16:34柳光濤鐘佩思劉大志丁淑輝
機床與液壓 2014年3期
柳光濤,鐘佩思,劉大志,丁淑輝
(1.山東科技大學先進制造技術研究中心,山東青島266590;2.山東大學機械工程學院,山東濟南250061)
數控機床[1]是先進制造技術的關鍵設備之一,而數控轉塔沖床是近年來高速鈑金加工的一種重要的壓力成型設備,集機、電、液、氣于一體,可在板材上進行高速沖孔加工和淺拉深成型,是一種通用、高效率和高精度的沖壓設備,擁有多個工位并能實現快速換模。
隨著我國沖壓行業的發展,板料沖壓設備性能逐漸與世界接軌,沖壓生產自動化程度得到了進一步的提高。在沖壓生產的首道工序中,我國許多企業仍然在采用傳統的手工上料方式,這種上料方式不僅生產效率低下、勞動強度大,而且易發生人身傷害事故。為提升我國沖壓生產的自動化水平、提高生產效率和改善工人生產勞動條件,研發出與沖壓設備自動化水平相配套的自動上料系統具有重要的意義[2-3]。
1 數控轉塔沖床組成和工作原理
數控轉塔沖床主傳動分為機械、液壓。機械主傳動工作原理是主電機通過小帶輪帶動飛輪轉動,再通過離合器/制動器的接合或分離,帶動曲軸旋轉,再通過曲柄連桿機構,帶動滑塊上、下往復運動,沖擊轉盤上所選定的模具對板材進行沖孔或其他成型加工。液壓主傳動的工作原理是將液壓系統提供的液壓油通過電磁換向閥的動作,進入液壓缸的上下腔,使活塞桿帶動滑塊上下往復運動,沖擊模具進行沖孔[2-3]。
機床的工作原理:在機床沒有任何報警的情況下,CNC 執行一編好的程序,依照程序指令,X 和Y軸帶著鋼板運動到沖頭下,T 盤將程序中所需模具運動到沖頭下,液壓沖頭執行對模具的打擊,完成一次沖壓,然后X 和Y 軸再移動一個位置,沖頭再執行一次沖壓,如此往復,只到一個程序全部執行完畢,退回到上料位置。
2 機械手總體方案
2.1 機械手總體結構
因為設計要求搬運的加工板材的質量達30 kg,長度達500 mm,同時考慮到數控轉塔沖床布局的具體形式及對機械手的具體要求,考慮在滿足系統工藝要求的前提下,盡量簡化結構,以減小成本、提高可靠度。機械手工作布局圖如圖1所示,機械手的總體結構如圖2所示。
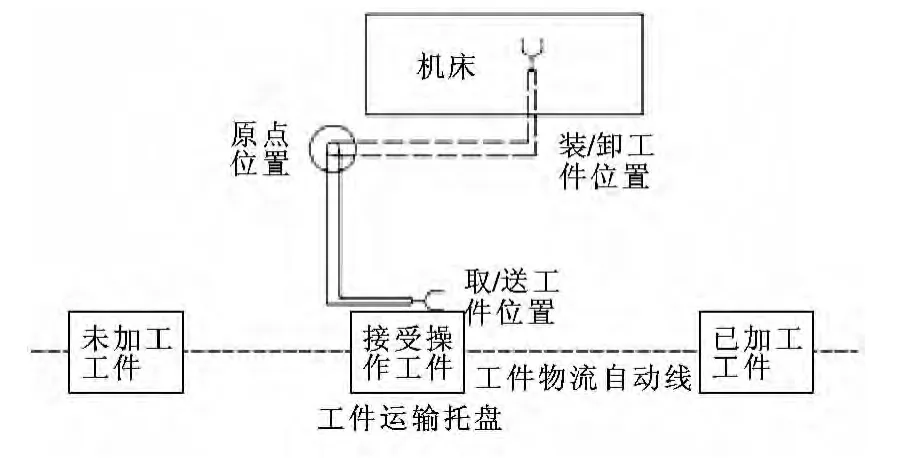
圖1 機械手工作布局圖

圖2 機械手總體結構
2.2 機械手腰部底座結構的設計
考慮到腰座是機器人的第一個回轉關節,對機械手的最終定位精度影響大,故采用電機驅動來實現腰部的回轉運動。不僅因其精度能夠很高,而且結構緊湊,不用設計另外的液壓系統及輔助元件。考慮到轉速以及扭矩的具體要求[4],采用大傳動比的齒輪傳動系統進行減速和扭矩的放大。腰部底座具體結構如圖3所示。
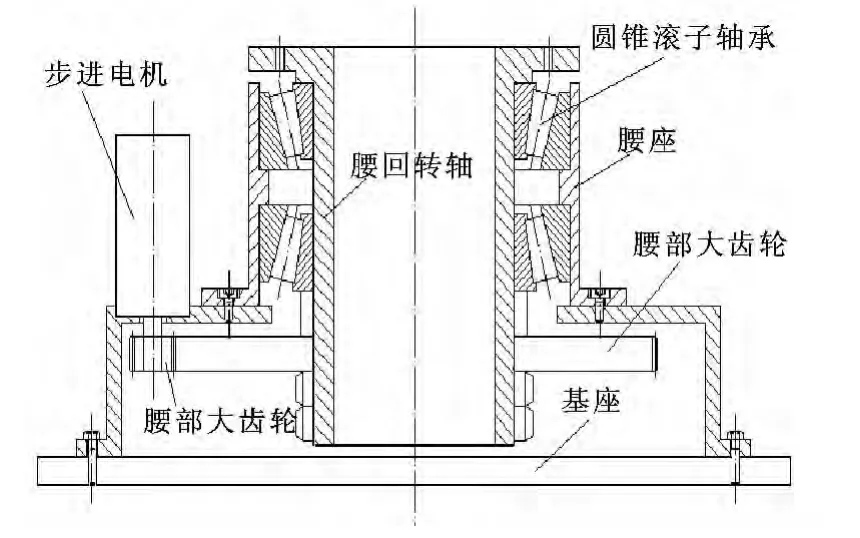
圖3 腰部底座具體結構圖
2.3 機械手手臂的結構設計
機械手有大臂升降和小臂旋轉的運動。考慮到搬運工件的質量較大,屬中型質量,同時考慮到機械手的動態性能及運動的穩定性、安全性,對手臂的剛度有較高的要求,所以大臂驅動選擇氣動傳動方式,控制簡單,易于實現計算機的控制。小臂旋轉運動采用電機控制。
同時,因為控制和具體工作的要求,機械手手臂的結構尺寸不能太大,因此,在設計時另外增設了導桿機構,盡量增加其剛度;為減小質量,導桿采用空心結構。通過增設導桿,能顯著提高機械手的運動剛度和穩定性。
2.4 機械手腕部的結構設計
通過對數控機床上下料作業的具體分析,考慮數控機床加工的具體形式及對機械手上下料作業的具體要求,在滿足系統工藝要求的前提下提高安全和可靠性,為使機械手的結構盡量簡單、降低控制的難度,設計的手腕不增加自由度,但手部要增加真空吸附輔助裝置。具體的手部結構如圖4所示。
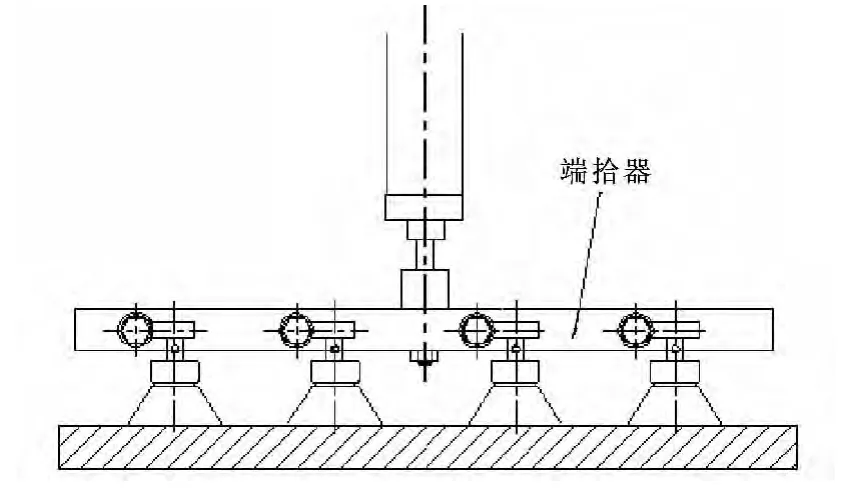
圖4 手部板料抓取裝置簡圖
2.5 機械手的機械傳動機構的設計
具體到該設計,由于氣壓缸實現直接驅動,它既是關節機構,又是動力元件,故不需要中間傳動機構,這既簡化了結構,同時又提高了精度。而機械手腰部的回轉運動采用步進電機驅動,必須采用傳動機構來減速和增大扭矩。經分析比較,選擇圓柱齒輪傳動,為了保證比較高的精度,盡量減小因齒輪傳動造成的誤差;同時大大增大扭矩,較大程度上降低電機轉速,以使機械手的運動平穩,動態性能好。
2.6 機械手驅動系統的設計
具體到該設計,在分析具體工作要求后,綜合考慮各個因素。機械手腰部的旋轉運動需要一定的定位控制精度,故采用步進電機驅動來實現;大臂采用氣壓驅動,小臂采用電機驅動,手部的端拾器因為要真空吸附,采用氣壓驅動。
2.7 機器人手臂的平衡機構設計
因為設計的機械手采用圓柱坐標型的結構,而且在手臂的結構設計以及整個機械手的設計和布局中都重點考慮了機械手手臂的平衡問題,通過合理布局,優化設計結構,使得手臂本身盡可能達到平衡。若實際工作中平衡結果不滿足,則設置彈簧平衡機構進行平衡。
3 數控轉塔沖床上料助力機械手關鍵技術研究
該設計創新之處在于:(1)機器人設計得簡單,操作靈活,實現各種環境條件下的助力效果,而且能實現自動控制;(2)手部采用真空吸附裝置技術,很好地完成對板材的抓取,實現上下料。
定位策略,考慮以下加工條件[5]:(1)數控轉塔沖床在初次裝夾時,定位銷使板材左側邊靠近工作臺左邊緣,即板材左側邊在工作臺之內,取板材左下角位置為加工坐標的原點;(2)定位只按x 軸正方向進行;(3)兩夾鉗由一個驅動裝置控制,不能獨立運動。所以采用的設計是當板材在工作臺正上方時夾鉗上的光傳感器開始定位移動,定位完成后將板材放下完成裝夾。
(1)有限元分析
在助力機械手結構設計中,除考慮強度問題外,還要考慮剛度問題[6],即機械手在抓起板材后,手臂受力會產生變形,要使機械手滿足位置精度要求,必須控制機械手手臂在受力后的變形值,使它在允許范圍內。文中采用有限元法。
助力機械手在運動過程中有一個受力最危險、變形最大的狀態,是機械手搬運板材放到工作臺時,重力力臂達到最大值,各臂處于受力最大狀態,確定其為分析工況。
載荷分為3 個部分:第一部分是機械手除底座外所有零部件的重力,包括大小臂及末端真空吸附裝置;第二部分是板材重力施加到各臂和底座上,板材重力為300 N。第三部分是底座自重,約束為一端固定,另一端施加反力及彎矩。
將建立好的助力機械手模型導入ANSYS 中,設定材料屬性:彈性模量E = 210 GPa,泊松比λ =0.26,密度ρ=7 800 kg/m3;單元類型:solid187;劃分網格:四面體自由網格劃分。
對助力機械手的靜強度分析采用POST1 處理。應力等值線可清晰地描述結果在整個模型中的變化,并可以快速確定模型中的危險區域,等應力圖如圖5所示。同時,等位移圖可以表示出零件各單元的位移變化情況,確定其位移量是否足以影響精度,等位移圖如圖6所示。
最大應力值為108 MPa,助力機械手材料為45號鋼,最大應力值顯然未超過材料的許用應力360 MPa,說明該設計是合理的,安全系數1.5 ~2。
分析得出最大位移位于機械手最右端,最大位移量為0.159 mm,計算要求位移精度為10 mm,所以位移量符合要求,確保運行安全。
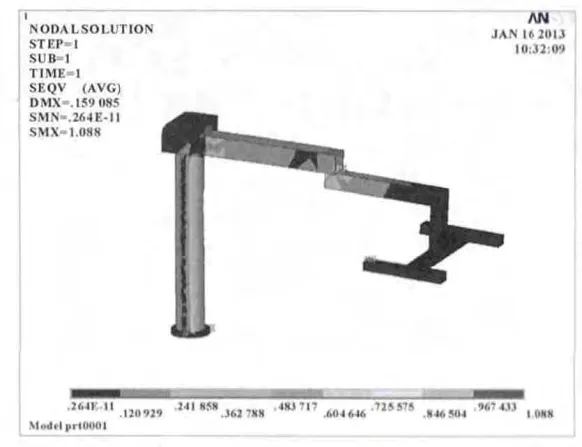
圖5 應力圖
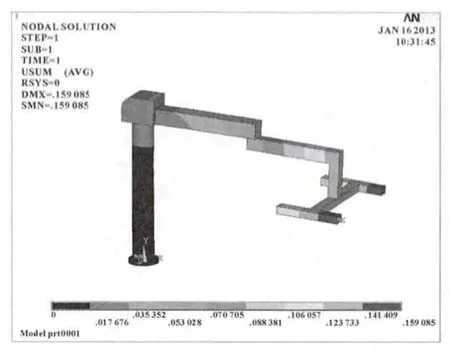
圖6 位移圖
(2)運動學分析
在MATLAB 平臺下[7-8],利用Robotics Toolbox建立了助力機械手的三維仿真模型,拖動各滑塊條,改變關鍵位置,即可瀏覽機械手的運動情況。
該機械手構建命令如下:
L1 =link([0 0 pi/2 0 0],'modified')
L2 =link([pi/2 280 0 0 0],'modified')
L3 =link([0 620 0 pi/2 0],'modified')
L4 =link([pi/2 0 0 542.2 0],'modified')
L5 =link([-pi/2 0 0 0 0],'modified')
L6 =link([pi/2 0 0 0 0],'modified')
robot=robot({L1 L2 L3 L4 L5 L6})
robot.name='助力機械手'
robot.base=transl([0 0 0])
drivebot(robot)
運行上述命令,即可以生成該機械手的三維仿真圖形,通過手動驅動圖中的滑塊條或輸入關節變量的值,來改變機械手末端位姿,從而直觀顯示機械手的運動。該助力機械手的三維仿真圖形如圖7,助力機械手仿真控制如圖8所示。
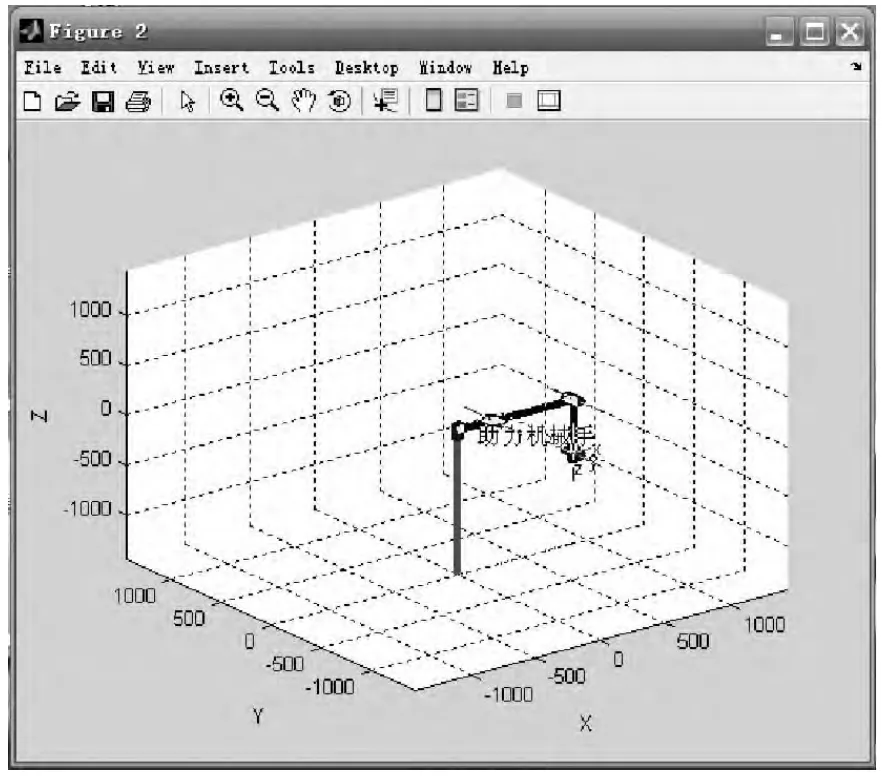
圖7 助力機械手三維仿真圖形
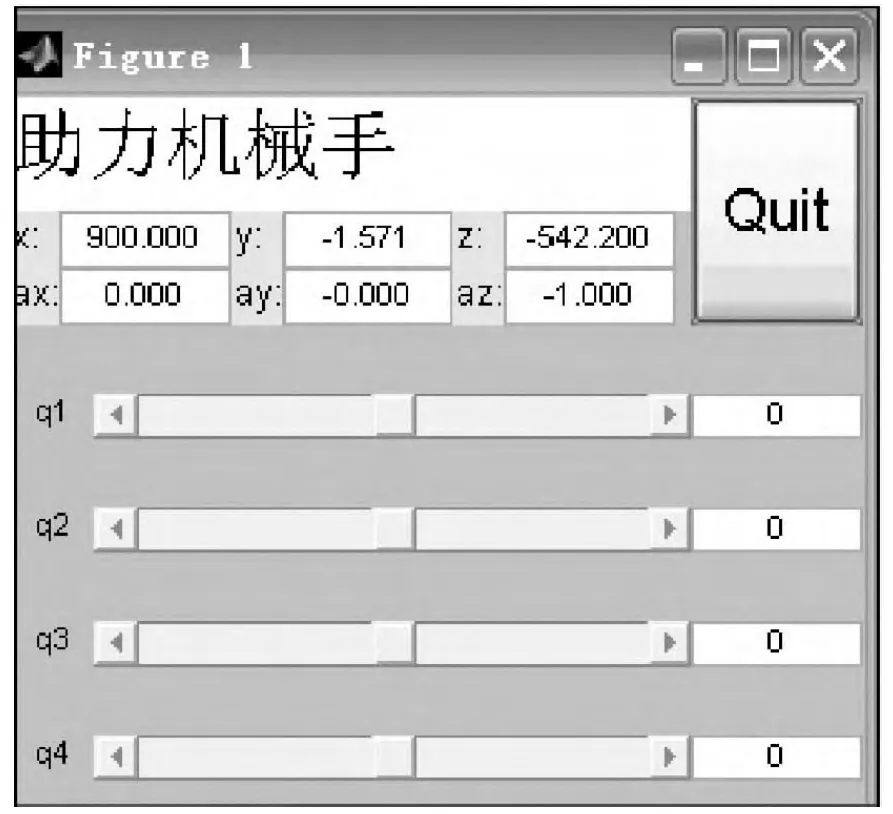
圖8 助力機械手仿真控制
4 結論
作者認為助力機械手和數控轉塔沖床組成的單元,能夠完成自動上下料,是可通過長時間連續機械加工大幅度削減加工成本的、極具國際競爭力的機械加工系統。
【1】RAUCH Matthieu,LAGUIONIE Raphael,HASCOET Jean-Yves,et al.An Advanced STEP-NC Controller for Intelligent Machining Processes[J].Robotics and Computer Integrated Manufacturing,2012,28(3):375-384.
【2】張雅瓊.數控系統及其技術發展趨勢[J].數字技術及應用,2010(6):161-163.
【3】王建軍.氣動搬運機械手的設計與研究[J].機械管理開發,2010(5):24.
【4】俞經經.車身焊裝助力機械手應用設計理論研究[J].裝備制造技術,2011(1):110-112.
【5】王瑜.5-UPS/PRPU 并聯機床工件定位系統的開發[D].秦皇島:燕山大學,2006.
【6】王顏輝.基于Pro/M 的機械手橫梁組件的有限元分析[J].機械制造與自動化,2012(4):147-149.
【7】席思文,李偉光,羅瑋韜,等.一種搬運機械手的運動學仿真研究[J].機電工程技術,2009(2):21-24.
【8】郭仁生.機械工程設計分析和Matlab 應用[M].北京:機械工業出版社,2006.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
現代裝飾(2020年7期)2020-07-27 01:27:42
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
商周刊(2017年17期)2017-09-08 13:08:58
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16

- 機床與液壓的其它文章
- Design and application of attitude measuring device for DC power output filter circuit
- Developing deburring device based on burr formation principles*
- Experimental study on milling tool life for SKD11 steel and optimization of cutting parameters*
- Application research on three-phase inverter with space-vector pulse modulation*
- Glowworm swarm optimization algorithm merging simulated annealing strategy*
- Comprehensive obstacle avoidance system based on the fuzzy control for cleaning robot