乒乓球撿球機器人的設計與實現
2014-03-17 01:16:34許東偉劉建群林淦
機床與液壓 2014年3期
關鍵詞:設計
許東偉,劉建群,林淦
(廣東工業大學機電工程學院,廣東廣州510006)
隨著人們對機器人技術智能化本質認識的加深,機器人技術開始源源不斷地向人類活動的各個領域滲透。在這其中,服務機器人作為一個重要分支,在國內外研究領域已經得到普遍重視。服務機器人的應用范圍很廣,主要從事維護保養、修理、運輸、清洗、保安、救援、監護等工作[1]。文中所述的撿球機器人,正是一種應用于乒乓球體育運動的自主式移動的服務機器人。
在乒乓球室里,由于訓練或者比賽的時候,地面上將會有很多出界或者無效的乒乓球。如果由人工來撿球,將會造成效率低、工作量大等弊端。因此,如果能有一種撿球機器人應用于乒乓球場館里,且能迅速找到球的位置并能夠實現自動撿球的功能,將可以使人們擺脫一些繁瑣的工作、大大減輕人們的勞動強度、提高人們的生活質量。
目前已有的乒乓球撿球機器人種類較少,且撿球動作的實現主要是通過機械手等機械裝置來撿球[2]。這些撿球裝置多因為機械機構的限制,對于位于墻角處和藏于障礙物之間的乒乓球不能有效撿取,因而只適用于障礙物較少且遠離墻壁的乒乓球的撿取。
1 機器人結構設計
1.1 撿球原理設計與實現
乒乓球的直徑為40 mm,質量為2.7 g,具有體積小、質量輕的特點,特別適合吸力裝置吸取。風扇在轉動時,抽風的一端會形成負壓;如果將一個管道與風扇的抽風面相連接,則在風扇的作用下,管道內的氣壓將小于管道外的大氣壓,管道口附近的物體將在壓力差的作用下被吸進管道里。因此,若采用由強力風扇與一個兩端開口的管道組成的吸球管,乒乓球就可以順利被吸取。
同時,為了提高吸球的效率與穩定性,可將吸球管道沿斜面布置,通過斜面減輕乒乓球向上運動所需的力。在風力作用下,若乒乓球在斜面上作瞬時純滾動,其受力如圖1所示,根據理論力學平衡方程:
(Fw-Gsinα)R=Mf
式中:Fw為風作用力,R 為乒乓球半徑,Mf為滾動摩阻,則有[3-4]:
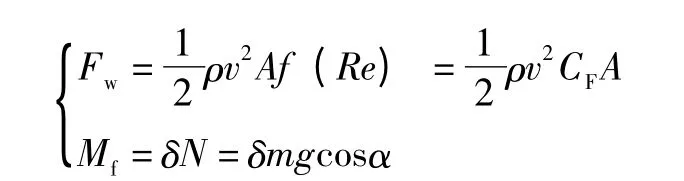
其中:CF為風力系數(球體取0.5)[5];ρ 為空氣密度,在地球近地面環境,溫度為20 ℃,標準大氣壓下,ρ=1.2 kg/m3;v 為風速;A 為迎風面積,A =πR2;δ 為滾動摩阻系數,取δ=5 mm。
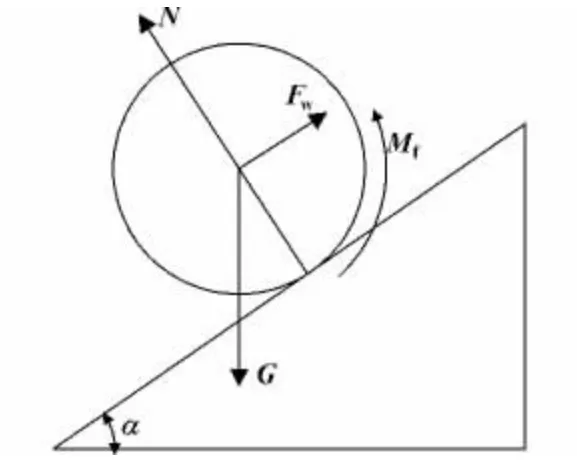
圖1 乒乓球在斜面的受力情況
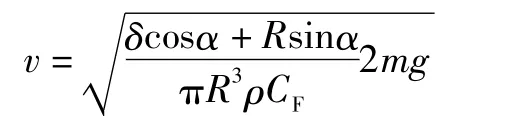
可以解得要使乒乓球順利在斜面上向上滾動的最小風速為:
設吸球管管口最大面積為Smax,安全系數為k,則選用風扇的排量可以近似為:

1.2 吸球管設計
乒乓球的直徑為40 mm,選用風扇的尺寸為50 mm×50 mm×28 mm,吸球管與水平的傾斜角度α =37°。為了提高撿球效率,將吸球口改為敞口設計。同時,考慮到敞口會降低吸球管的負壓,增大乒乓球的吸取難度,敞口部分不宜過大。綜合考慮各種影響因素,該撿球機器人的敞口尺寸設計為:最大敞口面積Smax=140 mm ×50 mm、敞口錐角45°,其設計效果如圖2所示。
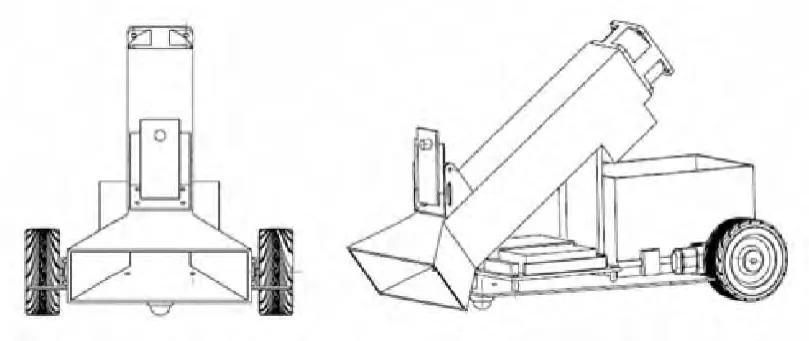
圖2 吸球管前端敞口設計效果圖
為了使被吸起的乒乓球能順利落到裝球腔內,在吸球管的末端設計有一個方形的出球口,并設計長度為20 mm 的軌道確保乒乓球的下落位置。出球口的設置,將不可避免地降低吸球管內的負壓程度,增大球的吸取難度。于是,在出球口的末端,設計一個質量很輕的方形擋板(自復位擋板):平時在重力作用下,擋板會自動處于垂直位置,出球口為打開狀態;當撿球風扇啟動時,由于吸球管內的負壓,擋板將在氣壓差作用下被吸起,覆蓋在出球口上,從而提高吸球管內部的負壓程度,確保吸球的有效性。吸球風扇關閉時,擋板自動打開,球也順利落進裝球腔。圖3是出球口自復位擋板的示意圖,圖(a)是吸球風扇未啟動時擋板位置的示意圖,圖(b)是吸球風扇啟動時擋板位置的示意圖。
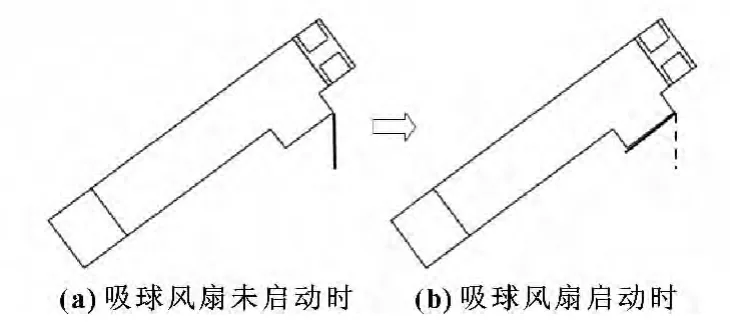
圖3 吸球管道出球口自復位擋板示意圖
為了減緩乒乓球被吸起進入吸球管的阻力,在吸球管的前端設計了一個伸出板。伸出板是配合吸球管吸球的部分,對它的設計主要就是計算它距離地面的高度和伸出的長度:如果距離地面太近,可能會因為微小的起伏就導致伸出板與地面接觸,不利于機器人的行走;如果距離地面太高,會出現伸出板擋住球運動從而撿不到球的情況,影響撿球的效果。在該設計中,伸出板的最前端距離地面高度為3 mm。
1.3 撿球機器人整體結構設計
乒乓球撿球機器人主要由車體、吸球裝置、CMOS 圖像傳感器、裝球腔、電機及其減速箱、系統電路板和鋰電池等部分構成,圖4 為撿球機器人的總體結構示意圖。
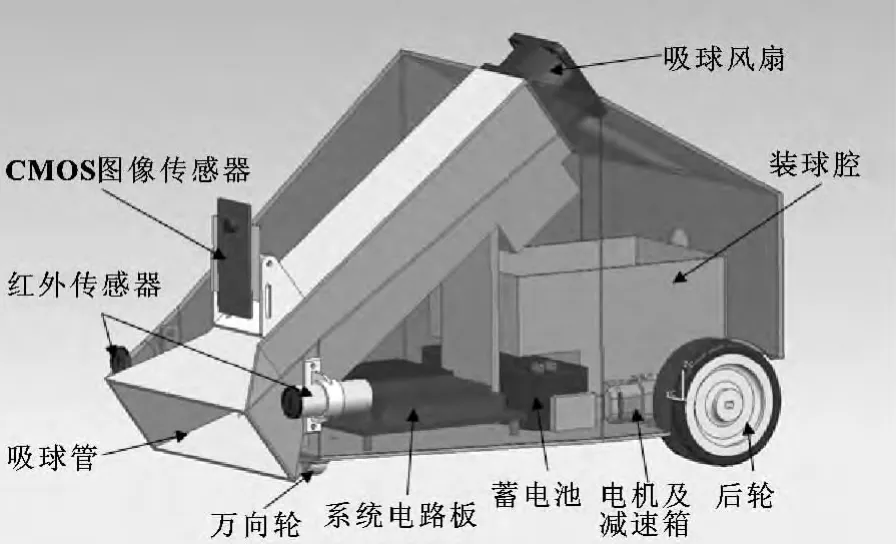
圖4 撿球機器人總體結構示意圖
撿球機器人的后輪由直流電機配套減速箱帶動,通過系統的控制,可方便實現機器人的前進、左轉和右轉。機器人的吸球功能主要是通過控制連接吸球管的吸球風扇來實現的。當吸球風扇工作時,乒乓球將在負壓作用下被吸進吸球管;吸球風扇停止工作時,在重力勢能作用下,乒乓球會自動掉進裝球腔。CMOS 圖像傳感器可以實時監測場地上乒乓球的位置,使機器人迅速到達乒乓球附近撿球。紅外傳感器可以使機器人有效躲避障礙物,增強機器人本身應變環境的能力。
2 機器人控制系統設計
撿球機器人的控制系統硬件框圖如圖5所示。
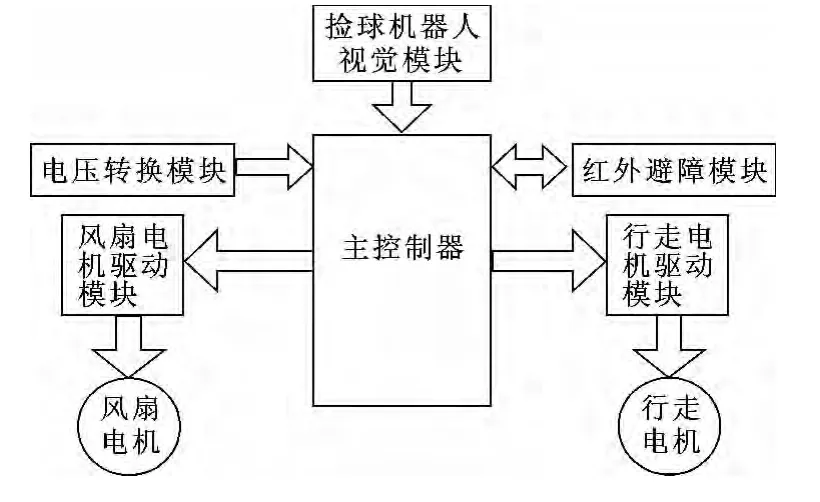
圖5 控制系統硬件框圖
其中,主控制器采用天嵌科技有限公司型號為TQ2440 的ARM 9 開發板來實現。該開發板采用S3C2440A 芯片作為CPU,具有功能齊全、運算速度快等優點。
2.1 電壓轉換模塊設計
撿球機器人的吸球風扇的額定電壓為12 V;機器人主控制器的輸入電壓為5 V;直流電機的額定電壓也為5 V。可將主控制器模塊與直流電機共用1 個電源,吸球風扇由于所需功率較大采用獨立電源。
由于采用鋰電池供電,為了保證主控制器能在額定電壓下正常工作,需要外接一個穩壓電路。較為常用的穩壓電路是利用芯片進行調壓[6]。該系統中運用的是三端集成穩壓器LM7805 芯片進行調壓。電源經LM7805 芯片的穩壓后,可達到5 V 的要求,為主控制器和各芯片Vcc 端供電。考慮到鋰電池的放電量較大及LM7805 在輸出大電流時功耗較大、發熱嚴重[7],采用兩個LM7805 穩壓芯片并聯輸出來降低單個芯片的功耗,防止芯片過熱穩壓失效。
根據吸球風扇的選擇設計,吸球風扇的供電可直接采用12 V 鋰電池,并通過繼電器進行控制。
2.2 基于CMOS 圖像傳感器的乒乓球位置檢測模塊
CMOS 圖像傳感器憑借其高靈敏度、短曝光時間和日漸縮小的像素尺寸獲得廣泛的應用。所設計的撿球機器人視覺部分采用CMOS 圖像傳感器來感知周圍環境并獲取乒乓球的位置。在實際撿球過程中,可能機器人視野中會同時出現多個乒乓球,這時需要對所捕獲的乒乓球位置數據進行處理,尋找出距離機器人最近的乒乓球所在位置進行撿球工作。CMOS 圖像傳感器(攝像頭)的工作流程如圖6所示。
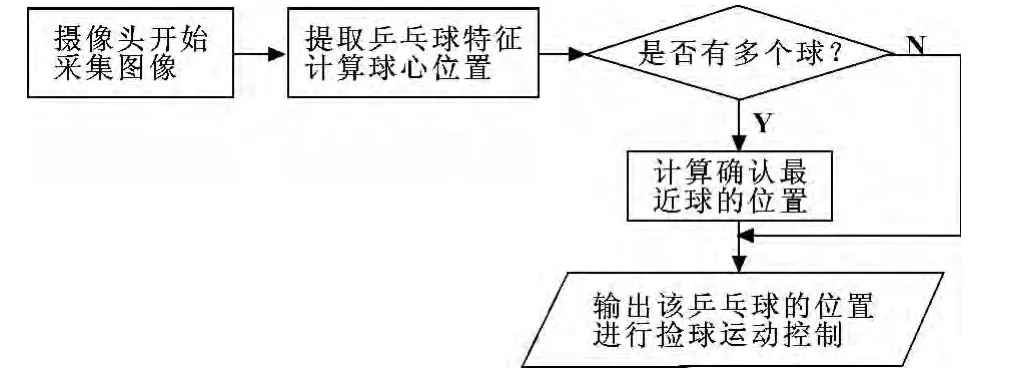
圖6 CMOS 圖像傳感器的工作流程圖
2.3 紅外線傳感器避障模塊
紅外線傳感器抗干擾能力強,可以避免陽光和電燈等光線中紅外線成分的干擾,且具有可見光的反射特性,常作為避障傳感器使用。紅外線傳感器有內置的光濾波器,除了光敏二極管發出的紅外線外,其它光線均不允許通過,這就保證了探測的準確性[8]。該撿球機器人采用距離可調節的NPN 型光電開關紅外避障傳感器,可檢測距離為3 ~80 cm。撿球機器人的避障控制流程圖如圖7所示。
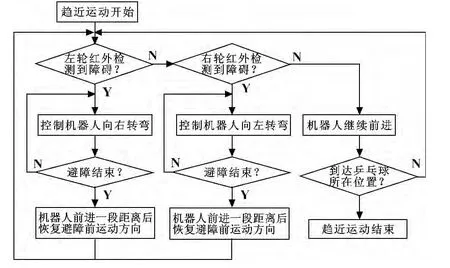
圖7 機器人避障控制流程圖
3 軟件設計
軟件設計是在ADS 開發調試環境下采用純C 語言編程實現的,軟件設計包括攝像頭圖像處理程序設計、外部中斷紅外避障程序設計、撿球動作程序設計。撿球機器人的軟件流程如圖8所示。
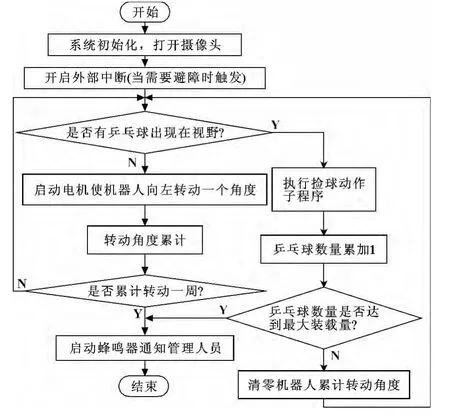
圖8 撿球機器人的軟件流程圖
4 實驗
經過撿球原理與機械結構的設計,最終完成的撿球機器人實物模型如圖9所示。
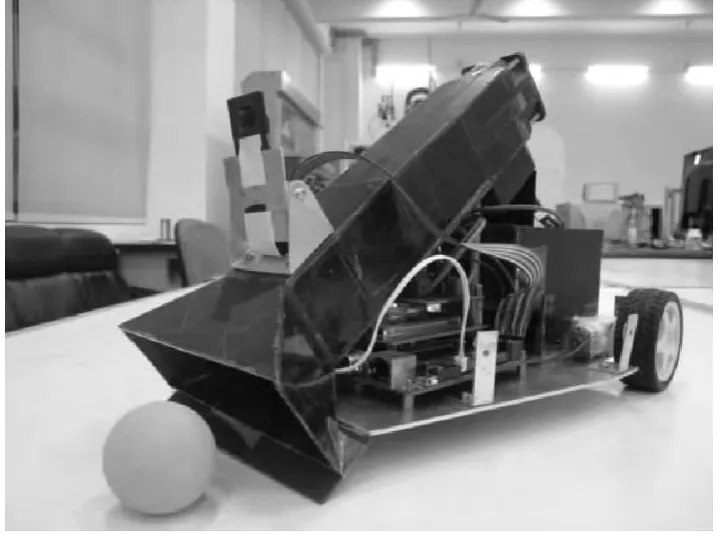
圖9 撿球機器人實物模型
4.1 撿球機器人的調試
機器人整體裝配過程中,需要對攝像頭的安裝角度進行設定,確定攝像頭的有效視覺范圍。所設計的撿球機器人攝像頭的安裝角度為俯角5°,有效視覺范圍為一個扇形,最遠處可達2.4 m,也即機器人具有2.4 m 的前瞻性。攝像頭的調試主要是根據實際安裝位置和環境光照強度,對程序中乒乓球的識別閾值進行修正。為了更有效、便捷地調試,設計了以下調試過程:
(1)將攝像頭捕捉到的影像傳送到一塊觸摸屏上,并在機器人前方有效視野范圍內放置乒乓球。乒乓球的位置需要合理分布,使捕捉到的影像中的乒乓球分為7 組:中間近距離球、中間中距離球、中間遠距離球、左下方球、右下方球、左上方球、右上方球。乒乓球的位置如圖10所示。
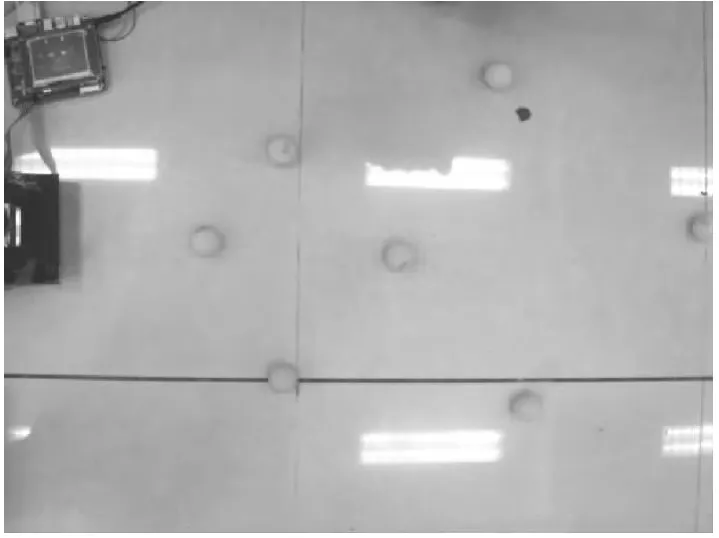
圖10 測試過程中乒乓球的放置位置
(2)根據分組狀況,在顯示屏上各個位置的乒乓球區域上取點讀取顏色值,并記錄數據。
(3)根據實驗數據,調整程序中圖像識別部分的乒乓球識別閾值。
4.2 撿球機器人的運行結果
撿球機器人的初步調試工作完成,即可將程序打包燒錄到主控制器的FLASH 中,實現機器人的脫機運行。運行時需要對機器人的撿球效果進行測試:分別在機器人近距離處的正前方、左前方、右前方,遠距離的左方、右方、中間各放置一個乒乓球,依次檢查機器人在不同球分布位置不同條件下的撿球動作執行效果;將機器人周邊的球取走,檢查機器人在找不到球的情況下的動作執行效果。
完成以上測試后,確認機器人撿球程序各參數設置的合理性后,即可進行機器人實際運行測試:在機器人周邊隨機放置若干乒乓球,啟動機器人,查看撿球動作的執行與撿球的效果。
經過幾次實際運行測試結果表明,機器人可以順利完成撿球動作,基本可以順利撿取所有的乒乓球。但同時也由于缺乏有效的路徑規劃機制,某些乒乓球的位置可能成為機器人的視覺死點位置,從而不能被順利撿取。部分實驗效果如圖11所示。
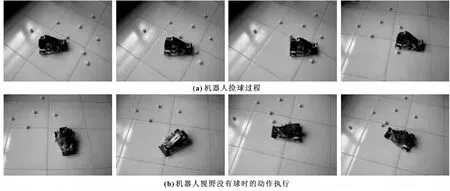
圖11 實驗效果圖
5 結論
提出了一種通過風扇產生的吸力來實現撿球的機器人,通過對實物模型的測試表明,該撿球機器人撿球效果良好。并且,在機械設計上,采用出球口自復位擋板及敞口設計,使得撿球效果更加顯著。同時,由于采用ARM 9 開發板作為主控制器,控制系統的可拓展性高,系統功能的可優化空間較大。該研究結果對開發撿球機器人具有較好的應用價值。
【1】徐德,鄒偉.室內移動式服務機器人的感知、定位與控制[M].北京:科學出版社,2008:1-3.
【2】安丹陽.新型自主式乒乓球撿球機器人的構形及關鍵技術研究[D].沈陽:東北大學,2008.
【3】徐華舫.空氣動力學基礎(上)[M].北京:北京航空學院出版社,1987.
【4】崔桂香,張兆順.流體力學[M].北京:清華大學出版社,1999.
【5】江潔.內外驅動兼備的球形機器人設計及性能分析[D].西安:西安電子科技大學,2010.
【6】張道德.單片機接口技術(C51 版)[M].北京:中國水利水電出版社,2006.
【7】郭天祥.新概念51 單片機C 語言教程:入門、提高、開發、拓展全攻略[M].北京:電子工業出版社,2009:494-500.
【8】雷鵬飛,沈華東,高坎貸,等.紅外傳感器在智能車避障系統的應用[J].電腦與信息技術,2010,18(4):52-53.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04

- 機床與液壓的其它文章
- Design and application of attitude measuring device for DC power output filter circuit
- Developing deburring device based on burr formation principles*
- Experimental study on milling tool life for SKD11 steel and optimization of cutting parameters*
- Application research on three-phase inverter with space-vector pulse modulation*
- Glowworm swarm optimization algorithm merging simulated annealing strategy*
- Comprehensive obstacle avoidance system based on the fuzzy control for cleaning robot