剪升機構平臺速度和活塞推力分析
2014-03-18 07:20:32張博利顏超張威
機床與液壓 2014年22期
張博利,顏超,張威,4
(1.中國民航大學基礎實驗中心,天津300300;2.中國民航大學中歐航空工程師學院,天津300300;3.中國民航大學機場學院,天津300300;4.中國民航地面特種設備研究基地,天津300300)
剪叉式升降機構在機場地面特種設備中常見,如:配餐車、移動登機橋、高空作業車和機務維修車等。液壓剪叉式升降機構結構簡單緊湊、升降平臺承載負荷大且平臺升程大,不僅在航空領域,在現代物流和自動化生產線等場合也得到廣泛應用。液壓剪叉式升降機構主要由剪叉機構和液壓系統以及平臺共同構成,液壓缸驅動剪叉機構變幅,達到升降目的。在起升過程中,存在液壓缸活塞推力大、液壓系統工作壓力大、平臺起升速度不平穩等問題,需對此進行運動學和動力學分析,為今后問題的解決和優化奠定基礎。
1 運動學分析
剪叉式升降機構由平臺BC、通過銷軸鉸接的支臂AC 和BD、液壓系統和底座AD 組成。其中,點A和B 為固定鉸支,點C 和D 為滑動鉸支。其中AE =EC=BE=ED = l,PE = a,AF = b,PC = d,β =0°。升降機構運動學分析簡圖如圖1所示。
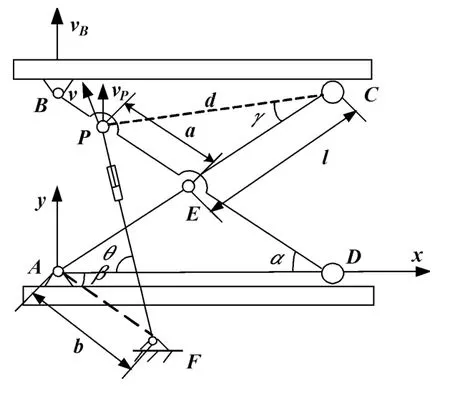
圖1 升降機構運動學分析簡圖
已知升降機構升降過程為平面運動,點B 豎直運動,點D 水平方向運動,通過瞬時速度中心法可知支臂BD 瞬轉中心為C。可得,點B 運動速度為平臺升降速度:

支臂BD 瞬心角速度:

由余弦定理可得:

點P 運動速度:

活塞運動速度:


以上是在已知升降機構結構尺寸和活塞運動速度下,確定平臺升降速度的關系式,也可根據平臺升降速度vB確定液壓缸流量。已知活塞運動速度為前提條件下,平臺升降速度:

在活塞運動速度一定的情況下,平臺升降速度vB與α、θ 角有關,并隨起升高度h 的變化而變化。液壓缸與支臂的鉸接位置同樣對平臺升降速度有影響。
根據工作情況的需要,升降機構在升降過程中要平穩、勻速。已知升降機構的平臺速度,則液壓缸的活塞速度:


通過各變量對時間t 的求導,隨著時間t 的變化,α、θ 角逐漸增大,加速度值減小。液壓缸活塞推力的大小根據F=ma、F=m˙v 計算,在不考慮升降機構負載的情況下,起始時活塞推力最大,導致平臺升降速度不平穩,隨著起升高度和時間t 的變化,平臺速度可逐漸平穩,也可更改液壓油路設計,減小起始時對平臺速度的影響。
2 動力學分析
假定升降機構等速升降,忽略自重,鉸鏈和滾輪的約束均為理想約束。動平臺上負載為W,液壓缸活塞推力P 為主動力,不計動載,如圖2所示。依虛位移原理知,所有作用在該質點系的主動力在任何虛位移中所做的虛功之和等于零,經計算整理后得:


圖2 升降機構受力簡圖
在平臺負載W 一定的情況下,活塞推力P 與α、θ 角有關,并隨著起升高度h 的變化而變化。活塞推力P 和液壓缸軸線與水平方向的夾角θ 有很大關系,起始位置θ 最小,此時活塞推力的垂直分量最小,在升降平臺負載一定的情況下,要求液壓缸的推力最大,此刻油缸處于最劣工況。為減小活塞推力,可增大液壓缸與支臂的鉸接位置a。
3 實例與計算結果
通過運動學和動力學分析后,得出平臺速度和活塞推力的關系式,利用MATLAB 軟件對剪叉式升降機構升程過程中平臺速度和液壓缸活塞推力隨起升高度的變化進行仿真,如圖3—4所示。升降機構具體參數如下:l=1 050 mm,h=500 ~1 600 mm,a=977 mm,b=940 mm,β=0°,W=100 kN,v=24.7 mm/s。

圖3 vB-h 曲線
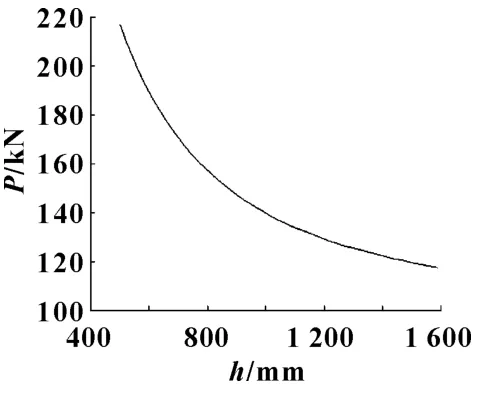
圖4 P-h 曲線
從圖3 中看出:升降機構在活塞運動速度一定的情況下,平臺速度在起始位置最大,隨著時間t 的增長,在h=1 000 ~1 600 mm 時趨于平穩。圖4 中,在升降機構負載一定的情況下,起始位置時活塞推力增大,隨著時間t 的增長逐漸減小,在h = 1 000 ~1 600 mm 時趨于平穩。驗證了運動學分析中,不考慮負載情況下,活塞推力根據F=m˙v,同樣是起始最大,而后逐漸減小。為使平臺速度和活塞推力在升程過程中平穩,可增大液壓缸與支臂的鉸接位置a。
4 結論
通過對升降機構進行運動學和動力學分析,得出升降機構平臺速度與活塞速度和活塞推力與機構負載之間的關系式,并利用MATLAB 軟件,分別仿真升降機構平臺速度和活塞推力隨起升高度h 的變化曲線,在起始時平臺速度和活塞推力都較大,可通過改變液壓缸的鉸接位置、液壓系統流量和液壓油路的設計,減小平臺速度和活塞推力。
[1]李鄂民,李金濤.剪叉機構中兩種液壓缸布置方式的分析比較[J].甘肅工業大學學報,2000,26(1):54-57.
[2]李鄂民,齊文虎,王濱,等.液壓缸雙鉸接式剪叉機構動力學及運動學分析[J].機床與液壓,2011,39(22):71-72.
[3]于永江,郭云緋,高暢.虛功原理法進行多層剪叉機構受力分析[J].機械設計與制造,2008(3):84-86.
[4]周立鵬,張曉麗,邢志偉.移動登機橋舉升機構設計[J].中國民航大學學報,2009,27(3):23-25.
[5]張威,吳孟麗,石旭東,等.剪刀架單元輸入配置方式比較研究[J].機床與液壓,2010,38(19):76-78.
[6]胡小舟,胡軍科,何國華.剪叉式舉升機構建模及關鍵參數研究[J].機械研究與應用,2006,19(4):84-85.
[7]LIU T,SUN J.Simulative Calculation and Optimal Design of Scissor Lifting Mechanism[C]//2009 Chinses Control and Design Conference(CCDC 2009),Guilin,China,2009.
[8]ZHANG Wei,WANG Xinxu,WANG Liwen.Strength Optimization Design of Box-shape Arms of a Scissor Lift Mechanism with Single Hydraulic Cylinder[J].Applied Mechanics and Materials,2012,141(1):513-518.
