大型耙吸船PMS系統軸發逆功的分析與解決
2014-03-22 04:51:06
中國港灣建設 2014年3期
關鍵詞:變壓器
(中交天津港航勘察設計研究院有限公司工程船舶設計所,天津 300461)
大型耙吸船PMS系統軸發逆功的分析與解決
霍學亮,李鵬超,趙春峰
(中交天津港航勘察設計研究院有限公司工程船舶設計所,天津 300461)
以大型耙吸式挖泥船功率管理系統為研究對象,介紹了功率管理系統的主要功能,闡述了電站模式轉換原理。通過上位機歷史回放軟件分析電站模式轉換中出現的軸發逆功問題。通過修改PLC程序和電站參數設置,成功解決了軸發逆功問題。
耙吸挖泥船;電站模式轉換;軸發逆功
0 引言
“通遠”輪是我國自行設計建造的大型自航耙吸挖泥船。主要用于沿海港口航道的疏浚、吹填工程,兼作海岸維護工程[1]。該船配備先進的功率管理系統(Power Management System,簡稱PMS),主要對電站進行自動操作和保護,通過對船舶主要負載的控制和分配,保證發電機、電站安全運行。本文針對“通遠”輪電站模式轉換時出現的軸發逆功問題進行分析,并提出了解決方案。
1 系統功能
“通遠”船功率管理系統的主要功能如下:1)實現電網供電模式的切換;2)實現電網部分失電后的自動恢復;3)實現對主要設備的過載保護;4)自動計算剩余功率,判斷大功率負載的啟/停;5)實現功率分配自動控制[2]。
1.1 船舶電站主要設備和供電模式
1.1.1 船舶主要設備
該船配置2臺2 500 kW的軸帶發電機(S)、1臺900 kW的輔發電機(A)和1臺480 kW應急發電機(E)。左、右690 V匯流排分別向1臺高壓沖水泵(J)和1臺艏側推(B)供電。電站配置2臺690 V變400 V主變壓器。主配電板左、右主變壓器的隔離開關分別為E、F,400 V匯流排上隔離開關分別為O、G、H、P。電站配置見圖1。
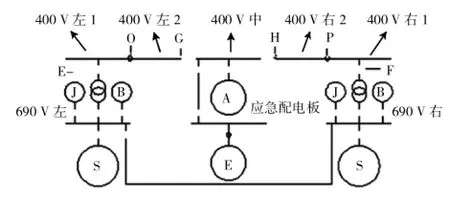
圖1 電站配置圖Fig.1 Power station deployment
1.1.2 供電模式
PMS系統為“通遠”船提供了9種供電模式,可分為3大類,分別為:航行模式、疏浚模式、停泊模式。供電模式見表1。
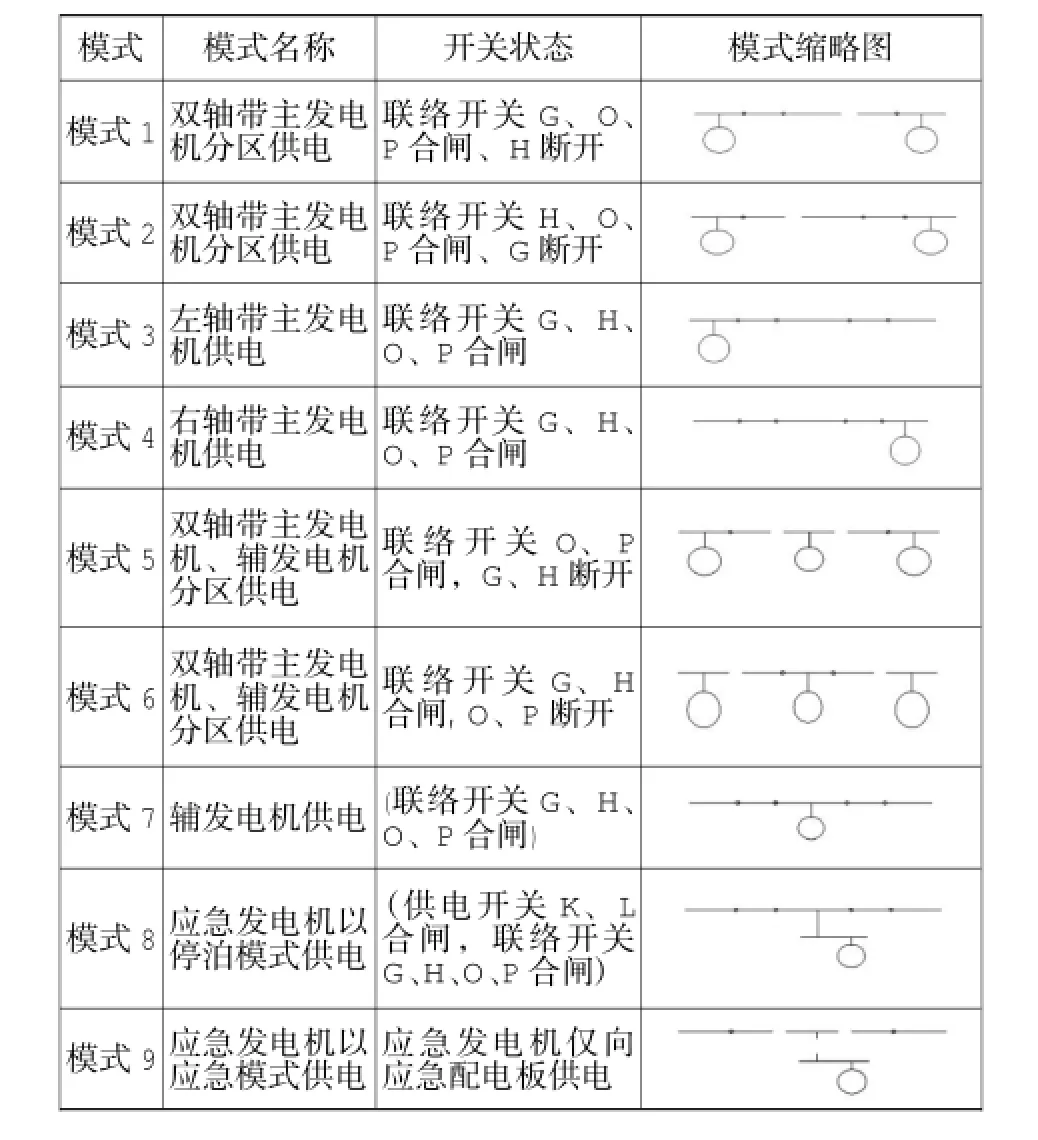
表1 電站供電模式Table 1 Power supply mode of power station
模式5為疏浚模式中左右泥泵以中速檔排岸工況,此時,左軸發供左1和左2匯流排,右軸發供右1和右2匯流排,輔助發電機供中匯流排。如圖2所示。
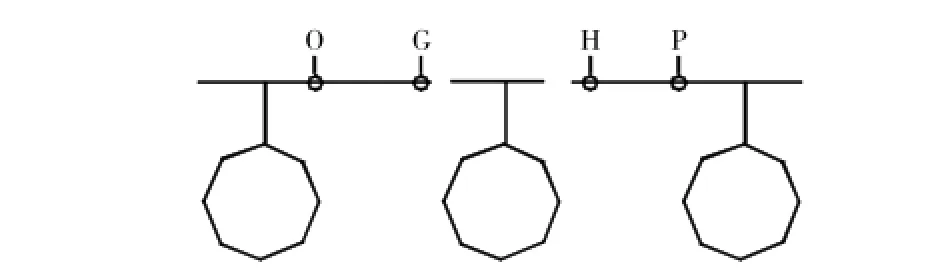
圖2 模式5電站示意圖Fig.2 Sketch map of No.5 mode of power station
模式6為疏浚模式中左右泥泵以高速檔排岸工況,此時,左軸發供左1匯排,右軸發供右1匯流排,輔助發電機供左2、右2和中匯流排。如圖3所示。
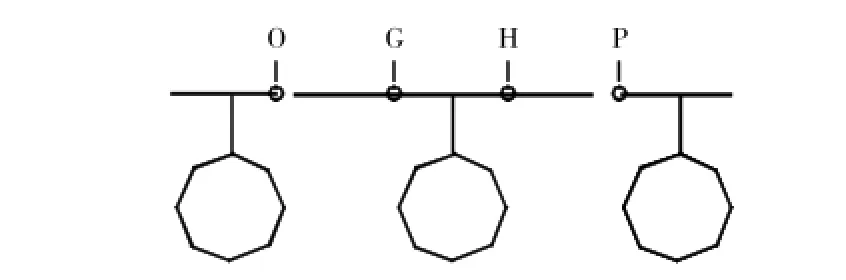
圖3 模式6電站示意圖Fig.3 Sketch map of No.6 mode of power station
1.2 失電保護
失電保護主要用于當配電板匯流排部分失電后,自動恢復供電,避免因失電而產生設備停止運行的情況發生。
1.3 重載問詢
重載問詢功能是指在啟動泥泵、側推等大負載設備時,PMS會根據整個電網的功率狀況,判斷是否允許設備啟動。
1.4 功率限制及保護
功率限制及保護功能主要用于防止由于負載過大,造成主機超負荷停車,造成設備損壞等事故的發生。一旦功率總和大于主柴油機額定功率,功率管理系統將發出超負荷的警報和要求減負荷的命令,功率管理系統自動進入減少可變螺距螺旋槳的螺距或降低主柴油機轉速的程序[3]。
1.5 泵、風機啟停及備用泵自動控制
在PMS柜MIMIC板上控制泵、風機的啟動、停止操作,同時還有備用泵的自動控制功能。
2 軸發逆功問題分析
2.1 模式轉換
模式6轉換至模式5的過程,是在模式6的電站模式下主要通過對主配電板400 V匯流排4個隔離開關的控制,對主機轉速的微調,實現輔發與兩軸發分別的并車或解列動作,最終達到模式5的電站模式。模式轉換見圖4,步驟為:
1)通過信號反饋,如果檢測到左、右高壓沖水泵處于運行狀態,則限制其電機轉速至0。如果檢測到左、右艏側推處于運行狀態,則降螺距至0。
2)PMS發出P開關合閘命令,配電板得到P開關合閘反饋信號后,配電板PPU調節輔發與右軸發至負載分配穩定,輔發與右軸發并車成功。
3)為了分閘H開關,解列輔發與右軸發,調節右主機轉速,從而調節右軸發頻率,再次調整輔發與右軸發間的功率分配,使輔發承載的負載占輔發與右軸發承載總和的70%與90%之間。隨后PMS發出H開關分閘命令,直至收到H開關已分閘反饋信號,輔發與右軸發解列成功。
4)PMS發出O開關合閘命令,配電板得到O開關合閘反饋信號后,配電板PPU調節輔發與左軸發至負載分配穩定,輔發與左軸發并車成功。
5)為了分閘G開關,解列輔發與左軸發,調節左主機轉速,調整輔發與左軸發的功率分配,使輔發承載的負載占輔發與左軸發承載總負載的70%與90%之間,隨后PMS發出G開關分閘命令,直至收到G開關已分閘反饋信號,輔發與左軸發解列成功。至此成功轉至模式5的電站模式,轉換結束。
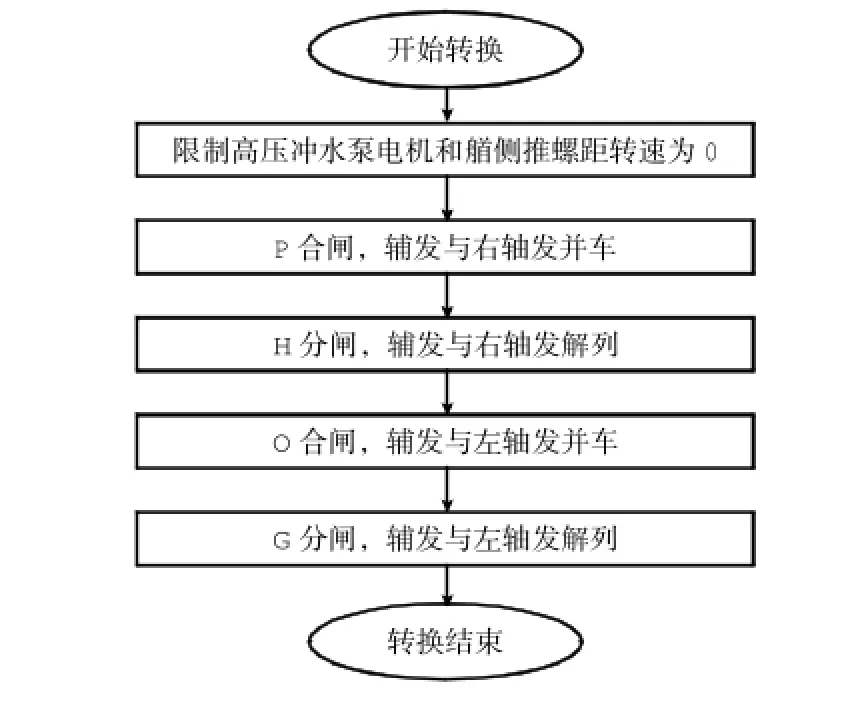
圖4 模式6轉至模式5的過程Fig.4 Process of No.6 mode transferred to No.5 mode
2.2 軸發逆功問題
在實際運行時,模式6轉換模式5的過程進行至第5步時,出現了軸發逆功現象,即負載轉移程序執行完成后,PMS發出G開關分閘命令,然而左軸發與左主變壓器負載顯示為0,輔發承載了配電板400 V匯流排左1段和左2段的全部負載,左主變壓器開關E(逆功率保護動作斷路器)跳閘,聯絡開關G并沒有按照程序設定分閘,轉換失敗并退出自動轉換模式,轉為手動模式。
2.3 問題分析
通過用上位機歷史回放軟件,對模式6轉換至模式5的過程進行分析,模式轉換過程中輔發與軸發并車后,輔發頻率會比軸發頻率稍微高些,可達到51 Hz以上,這時輔發的頻率處于自身的一個較高值。輔發與軸發并車后,配電板PPU會自行對輔發進行降速調節,通過調節使輔發頻率逐漸下降,從而對輔發與軸發所承載的負載進行分配直至功率穩定。由于輔發與左軸發并車、解列進程和輔發與右軸發并車、解列進程之間時間間隔過小,輔發與左軸發并車前處于頻率過高的狀態,影響了并車后的功率分配。
同時,對PLC程序進行分析,輔發與軸發解列前功率再次分配的程序中,設定輔發承載的負載占輔發與軸發承載總負載的70%與90%之間的一個固定比例區間,如圖5所示。此種比例設定無法滿足所有工況下不同的負載分布的情況,易導致輔發與軸發解列前負載分配不合理。
通過以上分析可得,輔發與左軸發并車后,左軸發無法承載到負載,從而負荷為0,造成了左軸發逆功,左主變壓器負荷為0,并且左主變壓器逆功時間超過逆功自保分閘時間,從而左主變壓器開關分閘,模式轉換失敗的結果。
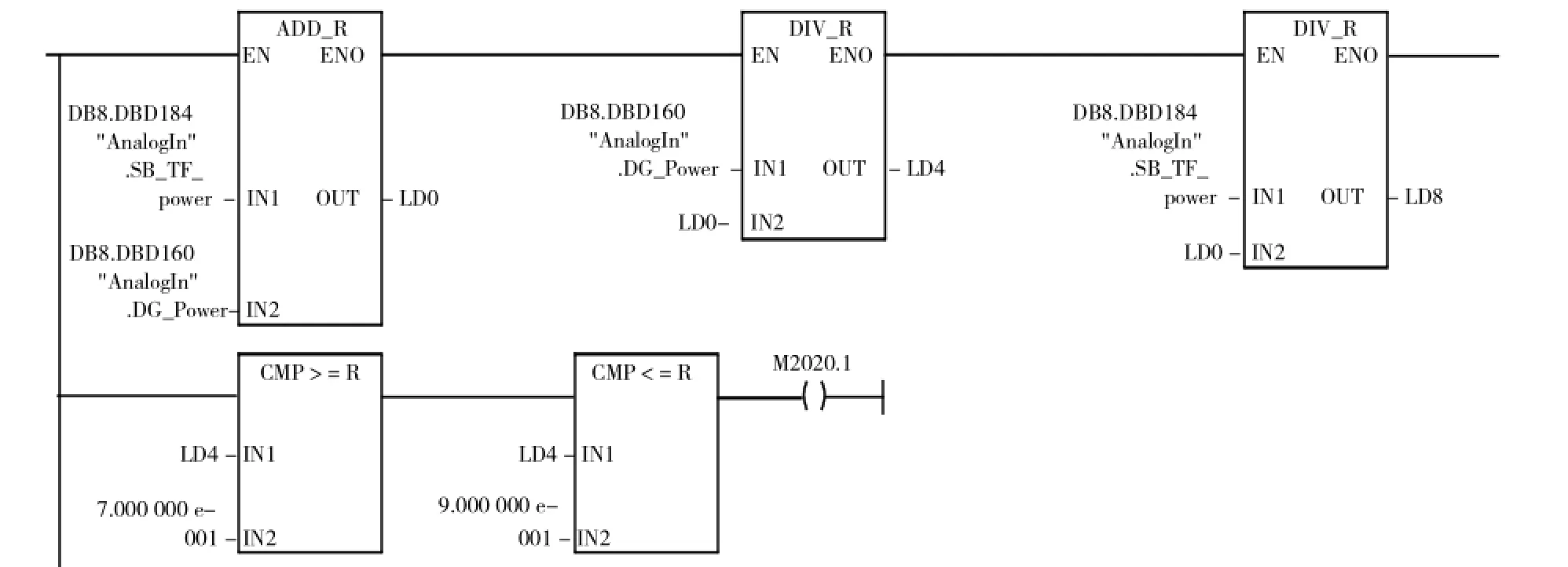
圖5 輔發負載值區間設定Fig.5 Load value range setting of auxiliary generator
3 解決方案
針對軸發逆功問題,通過對模式轉換工程分析,對PLC程序與配電板設置做出了以下調整。
3.1 增加延遲
在模式6轉至模式5的PLC程序中,輔發與右軸發先后并車、解列后,增加了30 s的延遲,見圖6、圖7。令PPU有充足時間自行對輔發進行穩頻調節,使頻率下調至50.5 Hz左右,這樣可使輔發與左軸發并車功率分配時,消除由于輔發頻率過高對功率分配的影響。
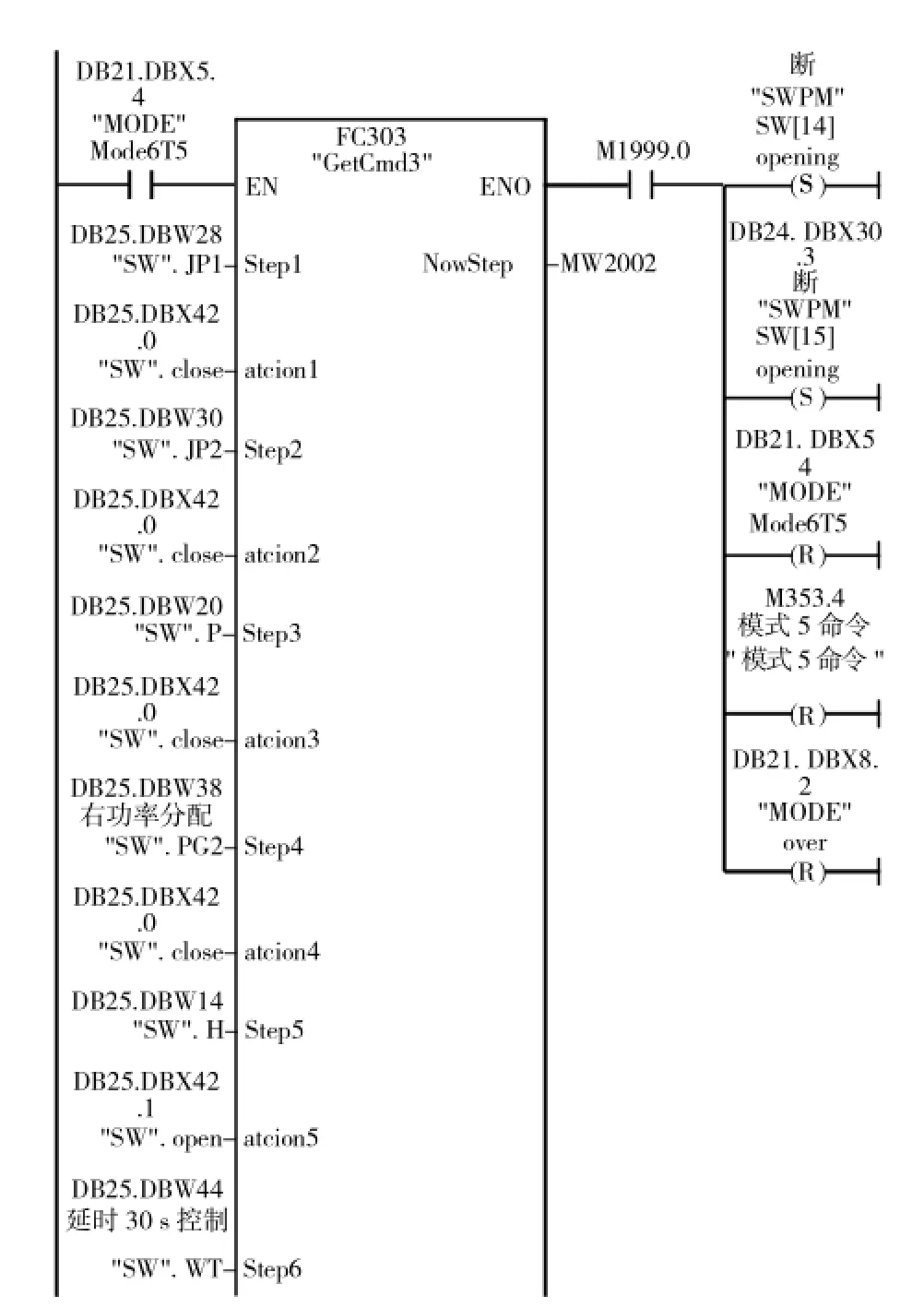
圖6 PLC程序模式轉換過程中增加延時Fig.6 Increase the time delay in PLC program mode conversion process
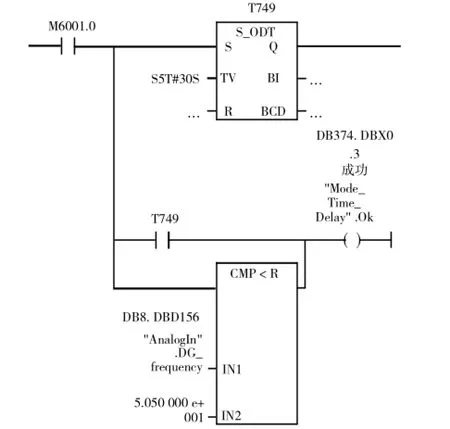
圖7 30 s延時Fig.7 30 s delay
3.2 主機轉速控制條件的調整
根據不同工況下配電板各段匯流排所承載負載,計算出不同工況下輔發與左軸發、輔發與右軸發并車時,輔發所承載配電板匯流排段負載所占總負載的比例、軸發所承載配電板匯流排段負載所占總負載的比例。用輔發、軸發所承載負載的動態比例作為調節主機轉速的條件,取代原控制程序中設定輔發功率達到固定的70%至90%總功率區間的調節條件。通過對主機轉速控制條件的調整,使輔發與軸發功率分配更加合理。
3.3 延長主變壓器逆功自保分閘時間
通過研究,在技術允許的范圍內延長主變壓器逆功自保分閘時間,解決輔發與軸發功率分配時主變壓器短時間內逆功跳閘的問題。
實踐證明,通過按照上述方案的調整,解決了電站模式6轉換模式5過程中軸發逆功、配電板主變壓器開關自保分閘的問題。
4 結語
本文針對“通遠”輪PMS系統的軸發逆功問題,通過對模式轉換工程分析,找到了解決該問題的辦法,積累了寶貴的經驗。PMS在耙吸挖泥船中的應用提高了設備的可靠性,增加了供電的連續性,特別是不同模式的預先設定,大大提高了工程施工人員的便利性[4]。功率管理系統的應用不僅可以提高挖泥的自動化程度,還可以提高設備的利用率,進一步實現了船舶節能減排。
[1] 王健.11 000 m3耙吸挖泥船全船規格書[R].天津:天津航道局有限公司,2010. WANG Jian.Specification for the whole 11 000 m3large suction hopper dredger[R].Tianjin:CCCC TianjinDredging Co.,Ltd.,2010.
[2]羅剛,李鵬超,于濤.大型復合驅動耙吸挖泥船集成監控系統設計與實現[J].中國港灣建設,2013(5):34-36. LUO Gang,LI Peng-chao,YU Tao.Design and realication of integrated monitoring and controlling system for large compound-driven hopper-dredger[J].China Harbour Engineering,2013(5):34-36.
[3]鄭捷.萬方耙吸式挖泥船“萬頃沙”功率管理系統[J].中國港灣建設,2008(2):65-68. ZHENG Jie.Power management system of trailing suction hopper dredger,Wanqingsha[J].China Harbour Engineering,2008(2):65-68.
[4]陳夢.功率管理系統在耙吸挖泥船中的應用[J].船舶與海洋工程,2012(1):26-34. CHEN Meng.Application of power management system on trailing suction hopper dredger[J].Naval Architecture and Ocean Engineering,2012(1):26-34.
Analysis and solution of the reverse power of shaft generator in PMS of large-scale trailing suction hopper dredger
HUO Xue-liang,LI Peng-chao,ZHAO Chun-feng
(Engineering Ship Design Department of CCCC Tianjin Port&Waterway Prospection&Design Research Institute Co.,Ltd.,Tianjin 300461,China)
Taking the PowerManagementSystem(PMS)oflarge-scale trailingsuction hopperdredgerasthe research objective,this paper introduces the main functions of PMS and expounds the principles of mode conversion of power station.History playback software installed on the host computer is used to analyze the problem of the reverse power of shaft generator occurred in the mode conversion.By modifying the PLC program and setting the parameters of power station on the dredger,the problem of the reverse power of shaft generator is successfully resolved.
trailing suction hopper dredger;mode conversion of power station;reverse power of shaft generator
U615.351
:A
:1003-3688(2014)03-0068-04
10.7640/zggwjs201403014
2013-10-31
霍學亮(1981— ),男,河北南和人,碩士,工程師,輪機工程專業,從事疏浚船舶電氣與自動化設計與研究。E-mail:huoxueliang0304@126.com
猜你喜歡
商品與質量(2021年43期)2022-01-18 05:30:32
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
經濟技術協作信息(2018年7期)2019-01-14 03:05:42
通信電源技術(2018年3期)2018-06-26 06:33:30
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年7期)2017-06-05 09:36:14
電子制作(2017年10期)2017-04-18 07:23:16
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46