虛擬仿真技術(shù)在帆船運(yùn)動(dòng)中的應(yīng)用研究
2014-03-22 02:35:52常曉峰宋軍紀(jì)鵬波王國松
海洋通報(bào) 2014年6期
常曉峰,宋軍,紀(jì)鵬波,王國松
(1.中國海洋大學(xué) 體育系,山東 青島 266100;2.國家海洋信息中心,天津 300171;3.中國海洋大學(xué) 信息學(xué)院,山東 青島 266100;4.中國海洋大學(xué) 教育部物理海洋重點(diǎn)實(shí)驗(yàn)室,山東 青島 266100)
虛擬仿真是虛擬現(xiàn)實(shí)與系統(tǒng)仿真技術(shù)的結(jié)合,是最近幾十年才發(fā)展起來的前沿信息技術(shù),從20世紀(jì)90年代起,它利用三維圖像生成技術(shù),高分辨率顯示技術(shù),計(jì)算機(jī)仿真技術(shù)等,生成逼真的三維虛擬環(huán)境,模擬日常作業(yè)和人類活動(dòng)。使用者通過特殊的設(shè)備,例如數(shù)據(jù)手套、特殊頭盔、或僅是鼠標(biāo)和鍵盤就可以進(jìn)入虛擬空間。用戶借助視覺、聽覺及觸覺等多種傳感通道與虛擬世界進(jìn)行自然的交互,它以仿真的方式給用戶創(chuàng)造一個(gè)實(shí)時(shí)反映實(shí)體對(duì)象變化與相互作用的三維虛擬世界,提供用戶一個(gè)觀測與該虛擬世界交互的三維界面,使用戶可直接參與并探索仿真對(duì)象在所處環(huán)境中的作用與變化,產(chǎn)生沉浸感。
正是由于上述特性,虛擬仿真技術(shù)在許多不同領(lǐng)域已經(jīng)被廣泛應(yīng)用,可以大大提高項(xiàng)目規(guī)劃設(shè)計(jì)的質(zhì)量,降低成本與風(fēng)險(xiǎn),加快項(xiàng)目實(shí)施進(jìn)度,加強(qiáng)各相關(guān)部門對(duì)于項(xiàng)目的認(rèn)知、了解和管理,從而為用戶帶來巨大的經(jīng)濟(jì)效益(紀(jì)慶革等,2003)。虛擬仿真技術(shù)應(yīng)用于體育訓(xùn)練和日常教學(xué),可以最大限度的挖掘人的潛能,規(guī)避體育訓(xùn)練中的意外和高難度動(dòng)作的傷害,彌補(bǔ)物質(zhì)條件的不足,研究在特定環(huán)境下的訓(xùn)練和比賽策略。
計(jì)算機(jī)虛擬仿真技術(shù)在體育運(yùn)動(dòng)項(xiàng)目方面的使用,給體育參與者開辟了新的思路。各種體育領(lǐng)域的虛擬仿真技術(shù)會(huì)極大的減少運(yùn)動(dòng)訓(xùn)練的危險(xiǎn)性,比如高山滑雪、賽車、登機(jī)等運(yùn)動(dòng)等。創(chuàng)造的客觀環(huán)境因素,可以克服真實(shí)世界無法復(fù)制環(huán)境帶來的困難(陳健等,2006)。為了訓(xùn)練運(yùn)動(dòng)員適應(yīng)比賽對(duì)象的比賽模式,計(jì)算機(jī)虛擬技術(shù)可以將比賽對(duì)象虛擬為陪訓(xùn)者,克服地區(qū)、國家等限制因素,創(chuàng)建現(xiàn)實(shí)中完全一樣的虛擬運(yùn)動(dòng)員,甚至著名球隊(duì),模擬對(duì)手的技術(shù)特點(diǎn)、外貌、性格等,達(dá)到有針對(duì)性的培訓(xùn)。不但如此,計(jì)算機(jī)虛擬技術(shù)也可以模仿駕駛場地,模擬攀登場館,模擬滑雪,模擬海況,這種新的訓(xùn)練模式將給體育運(yùn)動(dòng)帶來前所未有的體驗(yàn)。
隨著帆船運(yùn)動(dòng)的興起和盛行,帆船比賽作為一項(xiàng)重要的國際體育競技項(xiàng)目,越來越受到人們的重視,隨著計(jì)算機(jī)技術(shù)的發(fā)展,許多國內(nèi)外專家學(xué)者開始致力于帆船運(yùn)動(dòng)的虛擬仿真研究。澳大利亞的David 分析了如何建立一個(gè)帆船比賽模擬程序,首次提出可以用仿真程序模擬帆船項(xiàng)目比賽(Teirney,1999);日本的Akimoto(1997) 通過計(jì)算流體力學(xué)軟件開發(fā)了一種操縱帆船船體的不穩(wěn)定運(yùn)動(dòng)的仿真方法。國內(nèi)張引通過在3ds max 中建模進(jìn)行仿真實(shí)驗(yàn),對(duì)風(fēng)力做功機(jī)理進(jìn)行了解釋(張引等,2007)。王芳等(2008) 從帆船運(yùn)動(dòng)的力學(xué)原理出發(fā)分析了帆船的部分受力情況、動(dòng)力來源等,并運(yùn)用3ds max 軟件和reactor 動(dòng)力學(xué)系統(tǒng)進(jìn)行建模和仿真(2007);石清對(duì)激光雷迪爾級(jí)帆船船體的水動(dòng)力性能進(jìn)行了研究,通過使用MAXSURF 軟件對(duì)船體進(jìn)行數(shù)字模擬,并使用了SPAN 組件對(duì)該船體的性能進(jìn)行分析,通過計(jì)算初步得出有關(guān)于激光雷迪爾級(jí)船體水動(dòng)力性能、最佳航線以及體重對(duì)船體水動(dòng)力性能影響的一些結(jié)論。
目前來說,雖然對(duì)帆船運(yùn)動(dòng)的力學(xué)原理已有部分研究,但是大多數(shù)研究只集中于航速、航線優(yōu)化、操縱性等方面,運(yùn)動(dòng)仿真方面的研究較少。由于現(xiàn)有仿真軟件的局限性,大部分對(duì)帆船的研究不能取得實(shí)時(shí)的逼真運(yùn)動(dòng)姿態(tài)和參數(shù)信息,能綜合帆船動(dòng)力學(xué)公式和仿真研究,實(shí)時(shí)模擬帆船在海上的運(yùn)動(dòng)姿態(tài)并探索船速和風(fēng)速、風(fēng)向角等因素之間的關(guān)系的研究成果極少。本研究從力學(xué)原理出發(fā),經(jīng)過大量的海上實(shí)測研究,對(duì)帆船的受力情況,動(dòng)力來源等進(jìn)行了分析。綜合考慮風(fēng)、氣溫、流、浪、操作技巧等多種因素,將帆船在海上的實(shí)時(shí)運(yùn)動(dòng)姿態(tài),進(jìn)行了逼真的三維交互仿真。本成果可應(yīng)用于帆船運(yùn)動(dòng)的日常訓(xùn)練和比賽戰(zhàn)略戰(zhàn)術(shù)的模擬演練,對(duì)帆船運(yùn)動(dòng)的普及和賽事訓(xùn)練具有較強(qiáng)的輔助效果。
1 帆船動(dòng)力學(xué)分析
帆船的動(dòng)力來源于風(fēng)對(duì)帆的作用而產(chǎn)生的升力,而海流對(duì)舵、穩(wěn)向板和船體的沖擊會(huì)產(chǎn)生降低船速的阻力。事實(shí)證明帆船除了在頂風(fēng)狀態(tài)下無法利用風(fēng)隨意航行外,其他風(fēng)向均可以利用,風(fēng)向與航向之間的關(guān)系參照“風(fēng)向與船的角度劃分”(中國國家體育總局,2000)。帆船的受力分解可以簡化為風(fēng)動(dòng)力和附體阻力。
1.1 風(fēng)動(dòng)力
帆船迎橫風(fēng)行駛時(shí)所受升力的產(chǎn)生,主要是因?yàn)榉芰π纬上駲C(jī)翼一樣的弧形。當(dāng)氣流通過帆表面時(shí),帆面迎風(fēng)飽滿,會(huì)出現(xiàn)一條弧線,由于帆前面的氣流要經(jīng)過更長距離來和帆后面的氣流匯合,使帆前后氣流產(chǎn)生了不同的流速。空氣流速越快,氣壓越低,導(dǎo)致帆的迎風(fēng)面和背風(fēng)面壓強(qiáng)不一致,便會(huì)產(chǎn)生一個(gè)升力Y升和一個(gè)阻力X阻,升力和阻力大小分別為(繆國平,1994):

根據(jù)公式(1)、(2) 得帆船迎橫風(fēng)航行的前進(jìn)力和橫傾覆力大小如公式(3) (4),在順風(fēng)和尾風(fēng)航行時(shí),帆船的前進(jìn)力和橫傾覆力如式(5)(6)。
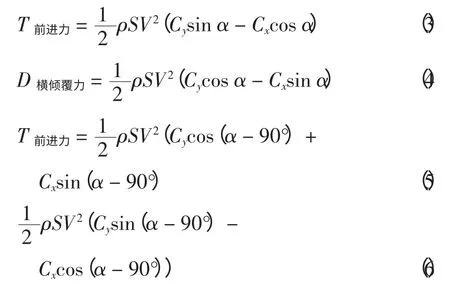
式(1)、(2)、(3)、(4)、(5)、(6) 中ρ 為空氣密度,S 為帆的面積,V 為風(fēng)速,當(dāng)產(chǎn)生航行風(fēng)時(shí)V 為合風(fēng)速。根據(jù)以上公式,只要知道帆的升力系數(shù)和阻力系數(shù)Cx、Cy,就可以把不同級(jí)別的帆船在不同風(fēng)速下帆的升力和阻力計(jì)算出來。
事實(shí)上,帆船在靜止?fàn)顟B(tài)下的受力狀態(tài)是理想情況,帆船啟動(dòng)后會(huì)產(chǎn)生航行風(fēng),風(fēng)向線指示的風(fēng)向角減小,帆的最佳迎角隨之略微減小,作用到帆上的真風(fēng)速發(fā)生變化;前進(jìn)力迎橫風(fēng)時(shí)較靜止時(shí)大,順尾風(fēng)時(shí)較靜止時(shí)小,尾風(fēng)小很多;船速迎橫風(fēng)時(shí),較靜止理論計(jì)算的速度快,順尾風(fēng)時(shí),較靜止理論計(jì)算的速度慢,尾風(fēng)慢的最多。對(duì)于合風(fēng)速的求法,對(duì)自然風(fēng)速、船速運(yùn)用余弦定理可求出:

此公式適用于迎風(fēng),橫風(fēng),順風(fēng),尾風(fēng)所有情況,其中V合表示合風(fēng)速,Vn表示船速,V風(fēng)表示風(fēng)速,α 為靜止?fàn)顟B(tài)時(shí)的風(fēng)向角。
1.2 船的附體阻力
不少專家學(xué)者從帆船運(yùn)動(dòng)的力學(xué)原理出發(fā)對(duì)帆船的動(dòng)力來源進(jìn)行了分析,但研究大多側(cè)重于風(fēng)力的分析,并沒有對(duì)船的附體阻力進(jìn)行深入研究[6]。船體所受的阻力包括空氣阻力和船體的附體阻力,附體阻力是由舵與穩(wěn)向板產(chǎn)生的形狀阻力與摩擦阻力合成的,減小附體阻力就是減小不當(dāng)操作。船體的附體阻力的研究方法分為理論方法、數(shù)值模擬和試驗(yàn)方法。目前由于受數(shù)學(xué)、流體力學(xué)及計(jì)算手段的限制,阻力理論方法的研究均有不同程度的簡化,導(dǎo)致精確度的偏差。因此,長期以來,船模實(shí)驗(yàn)和實(shí)船試驗(yàn)是研究阻力規(guī)律的主要手段,有時(shí)甚至是唯一手段(李世謨,1989)。海水的密度很大,舵與穩(wěn)向板的面積稍增大一點(diǎn),舵角稍改變一點(diǎn),這個(gè)阻力就很明顯,就要消耗帆的空氣動(dòng)力去克服它。
1.2.1 舵產(chǎn)生的阻力
水流流過舵的板面,產(chǎn)生了一個(gè)垂直于板面的作用力W,W 是一個(gè)改變航向,影響船速的力;還產(chǎn)生了一個(gè)平行板面的作用力Z,Z 忽略不計(jì),只研究W。對(duì)W 進(jìn)行分解可產(chǎn)生一個(gè)減低船速的力Wt和一個(gè)使船偏轉(zhuǎn)的力Wd,計(jì)算舵的水動(dòng)力經(jīng)驗(yàn)公式如式(8)。其中W 為舵的水動(dòng)力,A 為舵的面積,Vn為相對(duì)船速,即考慮海流作用后的合船速,求法參考合風(fēng)速,T 為舵角,式中41.3、0.195、0.305 是經(jīng)過下水海測總結(jié)的經(jīng)驗(yàn)系數(shù)。

所以有

根據(jù)公式(8)、(9)、(10) 以及大量實(shí)測數(shù)據(jù)可得到舵角與水動(dòng)力的關(guān)系曲線圖可知,舵角在30°~36°之間時(shí),雖然水阻力相差很大,但偏轉(zhuǎn)推力相差很小,因此:要偏轉(zhuǎn)效果好,又要盡量小的破壞船速時(shí),用30°舵角;要偏轉(zhuǎn)效果好,又要破壞船速較大時(shí),用36°舵角;要偏轉(zhuǎn)效果差,又要多減船速時(shí),用大于36°舵角;要只減速,不偏轉(zhuǎn)時(shí),用90°舵角。在自由水面和大風(fēng)水面、有戰(zhàn)術(shù)要求和無戰(zhàn)術(shù)要求的情況下要根據(jù)舵效的好壞、對(duì)船速的影響大小和恢復(fù)船速的時(shí)間長短綜合考慮,采用合適的舵角,甚至采用反舵角航行。根據(jù)動(dòng)量定理,要把舵的運(yùn)動(dòng)慣量全部消耗掉所用的時(shí)間可由公式(11) 計(jì)算出。式中m 為帆船質(zhì)量,Vn為帆船速度,Wt為舵產(chǎn)生的偏轉(zhuǎn)力,t 為時(shí)間。

1.2.2 穩(wěn)向板產(chǎn)生的阻力
穩(wěn)向板是穩(wěn)定航向、減小橫移、影響船速的部件,計(jì)算穩(wěn)向板的收放時(shí)機(jī)和收放量,就要首先知道穩(wěn)向板的正面阻力大小和側(cè)面阻力大小,綜合考慮再做決定,不能一味追求。穩(wěn)向板與舵板,同樣是板體,借助舵的水動(dòng)力公式(8) 可以求出穩(wěn)向板的正面阻力和側(cè)面阻力。此時(shí),式中的A 為穩(wěn)向板的正面面積,T 取0.01 度,Vn還是相對(duì)船速。帶入式(8) 后計(jì)算得W正≈0.001 kg,W側(cè)≈29.736kg。
2 虛擬仿真應(yīng)用
由于已有仿真軟件的局限性,不能獲得逼真的三維仿真結(jié)果,在實(shí)時(shí)交互性上也有欠缺。本文以自主研發(fā)的海陸一體化平臺(tái)為研究載體,該平臺(tái)是一款支持所有涉海現(xiàn)象模擬和涉海活動(dòng)仿真,支持多維虛擬互動(dòng)體驗(yàn)和可視化分析的虛擬現(xiàn)實(shí)開發(fā)平臺(tái)(紀(jì)鵬波等,2013)。
平臺(tái)中的模型全部用建模軟件按照真實(shí)比例創(chuàng)建,包括陸地海岸、帆船、浮標(biāo)、樹等3DS 格式模型和船員、魚、海鷗等FBX 格式動(dòng)畫。浮標(biāo)的位置是參考2008 奧運(yùn)會(huì)等國際帆船賽事的比賽規(guī)則,根據(jù)梯形繞標(biāo)路線擺放。海洋環(huán)境的模擬是基于GPU 編程技術(shù)創(chuàng)建一塊512*512 網(wǎng)格,采用Perlin 噪聲生成海浪模型,并綜合考慮折射、反射、光照、天空盒等因素的影響,使仿真環(huán)境更加逼真。為了真實(shí)地模擬比賽場景,系統(tǒng)中添加了幾條模型船,制定了簡單的碰撞檢測和避讓原則,并設(shè)定固定的路線以保證目標(biāo)船只的航線不受干擾。
在不考慮洶濤阻力的情況下,綜合上述公式得出計(jì)算船速的理論公式為

其中Vn為船速,T凈前進(jìn)力為綜合帆的空氣動(dòng)力、船的附體阻力、水動(dòng)力等因素影響后的受力矢量和,Z 為激光級(jí)帆船的船速系數(shù),船速系數(shù)是對(duì)船體表面與水體之間摩擦力的一種經(jīng)驗(yàn)描述,經(jīng)大量實(shí)船海測實(shí)驗(yàn)得出參考值為2.349。這里我們假設(shè)帆船是不能后退的,并且不考慮載員的重心偏移對(duì)帆船的影響。
環(huán)境因素設(shè)定:仿真過程中假定天氣因素和潮汐因素在帆船比賽過程中不變,但在新一輪比賽開始之前可以重新設(shè)定。由于帆船比賽規(guī)定必須迎風(fēng)起航,所以系統(tǒng)假定風(fēng)向的變化范圍是東北與西北之間,帆船的啟航方向是北方。風(fēng)速參照“蒲福風(fēng)級(jí)表”(大氣科學(xué)詞典編委會(huì),1994),在所設(shè)風(fēng)級(jí)范圍內(nèi)隨機(jī)變化并作用于仿真環(huán)境中;潮汐的方向和大小是固定的。為了簡化模型,本文不考慮浪高對(duì)帆船作用的影響。
帆船運(yùn)動(dòng)仿真:綜合上述公式,可實(shí)時(shí)計(jì)算出帆船的行進(jìn)速度,再獲取當(dāng)前幀速,可得出帆船每一幀的偏移量。本系統(tǒng)的控船命令由操作者通過鍵盤上的指定按鍵來發(fā)出,并同時(shí)控制帆船上的骨骼動(dòng)畫做出相應(yīng)的拉帆、擺舵、壓船邊等命令。為了從數(shù)據(jù)上分析帆船的最佳受力狀態(tài),在狀態(tài)欄實(shí)時(shí)顯示帆船當(dāng)前的帆角、舵角、風(fēng)向角、受力大小和當(dāng)前船速。為了宏觀掌握帆船與浮標(biāo)和終點(diǎn)線之間的相對(duì)位置,添加鷹眼功能,實(shí)時(shí)顯示在工作區(qū)右下角。
根據(jù)本文給出的算法,在i7 CPU 3.5GHz、8G內(nèi)存、GTX 550 顯卡、Windows 7 64x 系統(tǒng)環(huán)境下,可以實(shí)時(shí)顯示帆船狀態(tài),平臺(tái)運(yùn)行幀率大約75fps。仿真結(jié)果如圖1 所示。
3 結(jié)束語
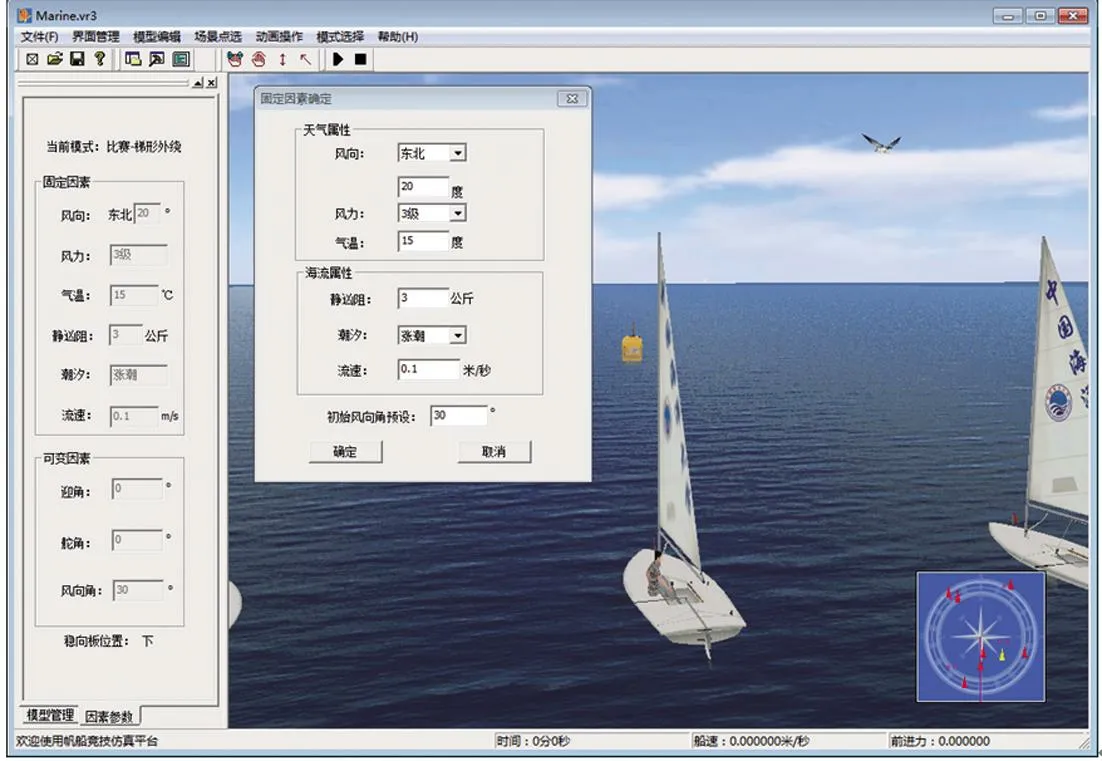
圖1 仿真結(jié)果
本文在總結(jié)日常訓(xùn)練獲得的經(jīng)驗(yàn)數(shù)據(jù)基礎(chǔ)上,運(yùn)用流體動(dòng)力學(xué)、空氣動(dòng)力學(xué)等相關(guān)物理學(xué)知識(shí),對(duì)帆船的受力進(jìn)行了比較全面的分析,給出了一套易于計(jì)算機(jī)實(shí)現(xiàn)的理論公式。本研究以自主研發(fā)的仿真平臺(tái)為載體,突破了傳統(tǒng)仿真軟件交互性不強(qiáng)、不能實(shí)時(shí)獲取參數(shù)信息、仿真結(jié)果不直觀等束縛,在綜合考慮風(fēng)、流、操作技巧等多種因素的影響下,將帆船在海上的三維運(yùn)動(dòng)姿態(tài)仿真出來。對(duì)于日常比賽訓(xùn)練,探索在不同天氣因素下,結(jié)合高精度的動(dòng)力環(huán)境數(shù)據(jù),計(jì)算帆船最有效的迎角、舵角等因素參數(shù),對(duì)制定戰(zhàn)術(shù)路線可以起到較強(qiáng)的參考作用。這對(duì)提升帆船運(yùn)動(dòng)的高科技含量,并促進(jìn)帆船運(yùn)動(dòng)的推廣都有著重要的現(xiàn)實(shí)意義。
Akimoto H,1997.Finite Volume Simulation of the Flow Around a Sailing Boat with Unsteady Motion·Journal of the Society of Naval Architects of Japan,18(1):35-44.
Teirney D P,1999.Yacht match race simulation.Engineering Science,11(3):45-52.
陳健,姚頌平,2006.虛擬現(xiàn)實(shí)技術(shù)在體育運(yùn)動(dòng)技術(shù)仿真中的應(yīng)用.體育科學(xué),26(9):34-39.
大氣科學(xué)詞典編委會(huì),1994.大氣科學(xué)辭典.北京:氣象出版社.
紀(jì)鵬波,常曉峰,田豐林,等,2003.激光級(jí)帆船動(dòng)力學(xué)建模與仿真.計(jì)算機(jī)測量與控制,21(002):520-522.
紀(jì)慶革,潘志庚,李祥晨,2003.虛擬現(xiàn)實(shí)在體育仿真中的應(yīng)用綜述.計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào),15(11):1333-1338.
李世謨,1989.船舶阻力.北京:人民交通出版社.
繆國平,1994.帆船運(yùn)動(dòng)的力學(xué)原理.力學(xué)與實(shí)踐,16(1):9-18.
石清,2007.激光雷迪爾級(jí)帆船船體水動(dòng)力性能研究及應(yīng)用,武漢:武漢體育學(xué)院.
王芳,2008.帆船運(yùn)動(dòng)的風(fēng)力分析及仿真.科技信息(學(xué)術(shù)版),29:435-436.
張引,張秉森,韓雪,2007.三維仿真技術(shù)在帆船運(yùn)動(dòng)理論中的應(yīng)用研究.系統(tǒng)仿真技術(shù),3(2):72-76.
中國國家體育總局,2000.帆船帆板(中國體育教練員崗位培訓(xùn)教材) .北京:人民體育出版社.
