采用傳統轉向架與徑向轉向架的HXD1C型電力機車動力學性能比較
2014-03-23 08:54:30王坤全
鐵道機車車輛 2014年4期
關鍵詞:轉向架
魏 靜,羅 赟,王坤全
(1 西南交通大學 牽引動力國家重點實驗室,四川成都610031;2 南車資陽機車有限公司 技術中心,四川資陽641301)
采用傳統轉向架與徑向轉向架的HXD1C型電力機車動力學性能比較
魏 靜1,羅 赟1,王坤全2
(1 西南交通大學 牽引動力國家重點實驗室,四川成都610031;2 南車資陽機車有限公司 技術中心,四川資陽641301)
為了改善我國重載牽引電力機車的輪緣磨耗現象,本文采用多剛體動力學軟件SIMPACK分別建立了采用徑向轉向架和傳統轉向架的C0—C0軸式HXD1C型電力機車動力學模型,通過比較兩者的非線性穩定性、直線運行性能和曲線通過性能,結果說明采用徑向轉向架的HXD1C型電力機車可以滿足120 km/h速度的運用要求;直線運行性能優良;除了通過曲線時車體橫向和垂向加速度外,曲線通過性能優于原車;降低輪緣磨耗顯著,在100 km/h以下減磨效果明顯,各計算工況下輪緣磨耗降低60%以上,車輪磨耗功降低47%以上。
HXD1C型電力機車;徑向轉向架;動力學
目前貨運電力機車正朝著重載大功率方向發展,其中C0—C0六軸大功率貨運電力機車又是重點發展的車型。HXD1C型電力機車是南車株洲電力機車有限公司在引進德國西門子技術的基礎上進行消化、吸收再創新,研發的新一代交流傳動重載貨運電力機車。南車資陽機車有限公司也按照設計圖紙參加批量生產HXD1C型電力機車。
HXD1C型機車轉向架采用了成熟而先進的技術,如輪盤制動、帶陶瓷絕緣滾動抱軸承傳動、二系高撓鋼彈簧、單軸箱拉桿輪對定位、整體免維護軸箱軸承、中間低位雙節斜拉桿推挽式牽引裝置等,具有功率大、恒功率速度范圍寬、黏著性能好、功率因數高、能耗低等特點[1-2]。然而其在運用過程中,也反映出了曲線路段輪緣磨耗較為嚴重的問題。針對這一問題,南車資陽機車有限公司參考引進的美國GM EMD公司HTCR型徑向轉向架技術[3-4]對該型機車換裝徑向轉向架展開研究。要求在不改變軸距、牽引和制動方式,以及轉向架與車體接口的基礎上,實現現有HXD1C機車轉向架(以下稱傳統轉向架)徑向功能,其徑向轉向架與傳統轉向架的主要區別在于(1)增加一套徑向機構[5]和一系縱向減振器,因此對構架結構改動,以適應設置徑向機構安裝座、一系縱向減振器安裝座等要求;(2)增大軸箱拉桿縱向剛度,降低一系彈簧縱橫向剛度;(3)調整牽引桿吊桿,以適應構架結構的改變。
HXD1C型電力機車與之前的電力機車相比,換裝徑向轉向架有其固有難度。首先,HXD1C型轉向架采用中間低位雙節斜拉桿推挽式牽引裝置,為避免導向機構與構架上的牽引桿支座干涉,需要采用新的設計將導向耦合斜拉桿布置在電機上方[5],充分利用構架上部和車體底架下部空間。此外,HXD1C型電力機車轉向架的單元制動器也需要能適應輪對徑向偏轉時的輪盤制動。
另一方面,自導向徑向轉向架要求較小的彎曲剛度以適應輪對徑向偏轉;足夠的剪切剛度和牽引剛度滿足橫向穩定性以及傳遞牽引力的需要[6]。因此彎曲剛度、剪切剛度和牽引剛度合適與否對機車能否取得成功具有重大的影響。以SS3B型電力機車轉向架為例,由于它的一系懸掛剛度較軟,二系懸掛剛度較硬;而且改裝徑向轉向架時雙拉桿軸箱定位方式換為單拉桿定位(可以進一步降低輪對的偏轉剛度),比較容易實現徑向轉向架剛度的要求。與此相反,HXD1C型電力機車轉向架的一系懸掛硬,二系懸掛軟;采用單拉桿軸箱定位方式。在結構空間內,難以達到較小的輪對偏轉剛度。所以將徑向轉向架技術推廣運用到HXD1C型電力機車上是否有意義,徑向機構能否在一系彈簧縱橫向剛度較大的情況下達到有價值的輪緣減磨效果,是本文需要論證的。
1 計算模型
HXD1C型傳統轉向架機車由車體、2個構架、6個牽引電動機和6個輪對組成。車體和構架間由二系懸掛裝置連接,二系懸掛裝置由高圓彈簧(每側3組)、2個斜對稱布置于構架端部的橫向減振器、2個垂向減振器構成。構架和輪對之間由一系懸掛裝置連接,一系懸掛裝置由一系彈簧、軸箱拉桿和垂向減振器(端軸)組成。牽引電動機與輪對采用圓錐滾子軸承連接,同時通過一根吊桿懸掛在構架上。圖1是HXD1C型傳統轉向架機車采用SIMPACK軟件建立的物理模型。

圖1 HXD1C型傳統轉向架機車物理模型
模型的自由度及廣義坐標見表1,用上角標*表示不獨立的自由度,用上角標1表示相對輪對的自由度,用上角標2表示相對構架的自由度,用上角標3表示相對平牽引桿的自由度,i=1~2,j=1~6,共33個剛體,總計99個自由度。
電機裝配與吊桿懸掛點用三向平動和轉動剛度與阻尼連接。動力學計算中考慮了輪對自由橫動量和軸箱橫向止擋的非線性、二系橫向彈性和剛性止擋的非線性以及各減振器的非線性特性,還考慮了采用JM3磨耗型踏面與60 kg/m鋼軌匹配的輪軌接觸幾何關系,以及蠕滑力的非線性。
軌道不平順采用按美國較差、AAR5級功率譜轉換的時域隨機不平順線路。
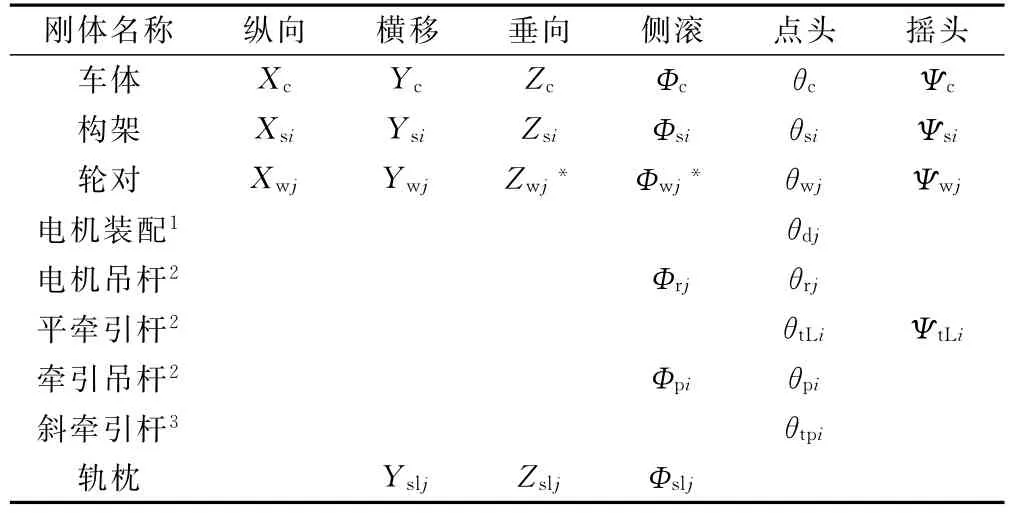
表1 HXD1C型傳統轉向架機車模型的自由度及廣義坐標
HXD1C型徑向轉向架機車模型(圖2)是在傳統轉向架機車模型基礎上,增加了徑向機構(圖3)。徑向機構由2根導向梁和1根耦合連桿組成,導向梁包括樞軸、導向梁和轉臂3部件,通過樞軸固定在構架上,只能相對構架繞Z軸轉動。耦合連桿通過轉臂將同一構架上的前后導向梁連接起來。每根導向梁與構架之間安裝兩個縱向減振器,每根導向梁通過剛度很大的軸箱拉桿與相應的端軸輪對連接。
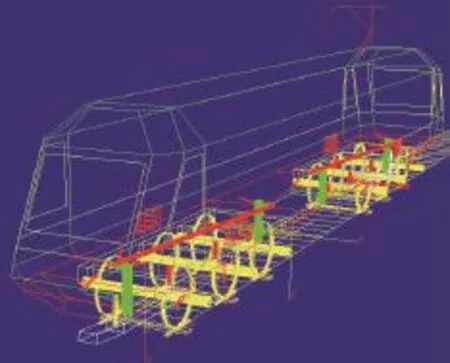
圖2 HXD1C型徑向轉向架機車物理模型

圖3 徑向機構物理模型
模型的自由度及廣義坐標見表2,上角標*、上角標1、上角標2和上角標3的表示意義同傳統轉向架機車模型,上角標4表示相對導向梁的自由度,i=1~2,j=1~6,k=1~4,共39個剛體,總計106個自由度。

表2 HXD1C型徑向轉向架機車模型的自由度及廣義坐標
2 非線性穩定性比較
非線性穩定性計算時,截取一段長度為50 m的AAR4級不平順時域譜作為激擾,機車以一定速度通過不平順后,在無不平順直道上繼續運行到300 m時,考察各剛體位移的收斂和發散情況來判斷其穩定性。
圖4是原車與徑向轉向架機車在不同速度下各輪對中振動最激烈的第一輪對橫向位移極限環振幅曲線。圖中表明惰行工況徑向轉向架機車非線性臨界速度為180 km/h,原車非線性臨界速度大于200 km/h。雖然采用徑向轉向架后,機車的臨界速度降低,但是穩定性仍然滿足120 km/h運用要求。
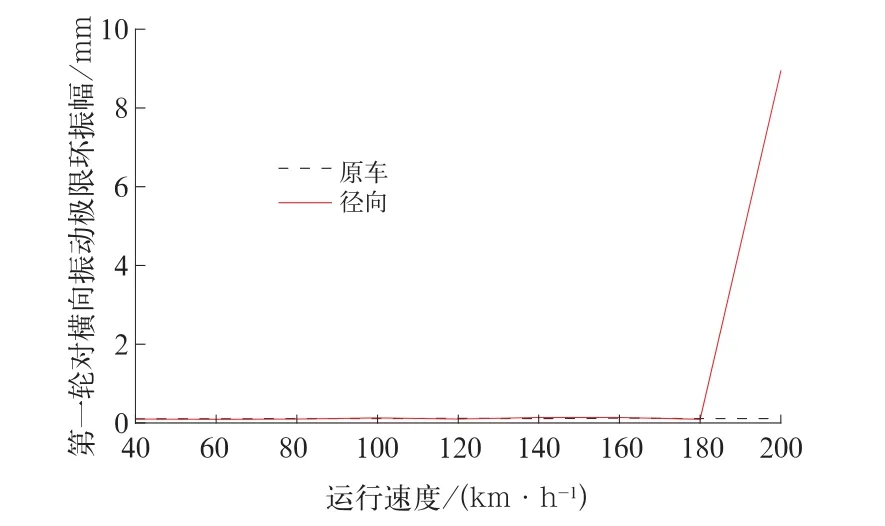
圖4 機車非線性臨界速度比較
3 直線運行性能比較
考慮到長區間運行的線路條件可能相差很大,這里采用了具有美國AAR5和AAR6不平順的兩種直線軌道,并讓機車以40~140 km/h的速度運行。
3.1 橫向平穩性
徑向轉向架機車和原車司機室車體最大橫向平穩性指標(即均值加3σ值)如圖5。兩種線路條件下徑向轉向架機車司機室橫向平穩性指標都比原車略增大,增大幅度小于4%,仍屬于優良。最大橫向加速度的變化趨勢與最大橫向平穩性指標類似,也比原車增大,增大幅度小于8%,屬優級。
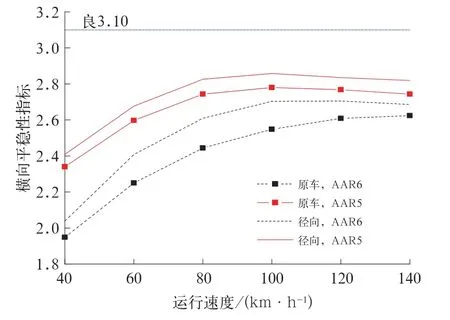
圖5 機車直線運行最大橫向平穩性指標比較
按標準(2 m平滑)處理后的最大輪軸橫向力(即均值加3σ值)如圖6所示。在計算范圍內,徑向轉向架輪軸橫向力都小于UIC 518規定的線路輪軸橫向力極限值91.75 k N。在100 km/h速度以下,徑向轉向架機車直線運行最大輪軸橫向力比原車減小;但是隨著速度提高,在AAR5線路上,速度110 km/h以上,以及在AAR6線路上,速度100 km/h以上,最大輪軸橫向力比原車逐漸增加。
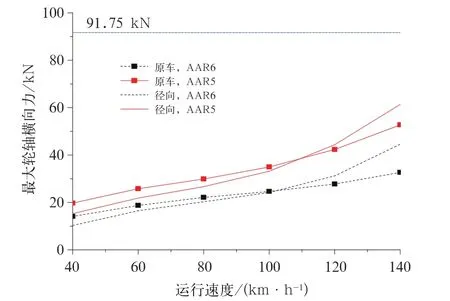
圖6 機車直線運行最大輪軸橫向力比較
3.2 垂向平穩性
徑向轉向架機車和原車司機室車體最大垂向平穩性指標見圖7。圖中徑向轉向架機車比原車司機室垂向平穩性指標降低。最大垂向加速度的變化趨勢與最大橫向平穩性指標類似,也比原車降低。由于沒有實測的線路不平順,因此這里計算的結果不能作為評定指標,但可以用來比較研究在相同線路條件下機車的性能變化。

圖7 機車直線運行最大垂向平穩性指標比較
圖8是按標準(2 m平滑)處理后的最大左輪垂向力(即均值+3σ值)。在計算范圍內,垂向力都小于UIC 518規定的垂向力極限值200 k N。在100 km/h速度以下,徑向轉向架機車最大左輪垂向力比原車減小;但在AAR6線路上,速度110 km/h以上,垂向力比原車逐漸增加。兩者的脫軌系數和輪重減載率最大值也都遠遠小于規定的極限值,這里不再給出具體數值。
4 曲線通過性能
4.1 光滑軌道曲線通過磨耗比較
機車以60~120 km/h的速度通過緩和曲線長120m、超高120 mm,半徑300~800 m的曲線,線路無軌距加寬,不考慮線路不平順,其磨耗可采用車輪磨耗功(=車輪橫向力×輪對橫向速度)或輪緣磨耗因子(=導向力×沖角)來衡量,圖9是機車磨耗功隨著速度和曲線半徑的變化及變化百分比,圖10是機車輪緣磨耗因子隨著速度和曲線半徑的變化及變化百分比,圖中曲線上的數值代表曲線半徑的百位數。
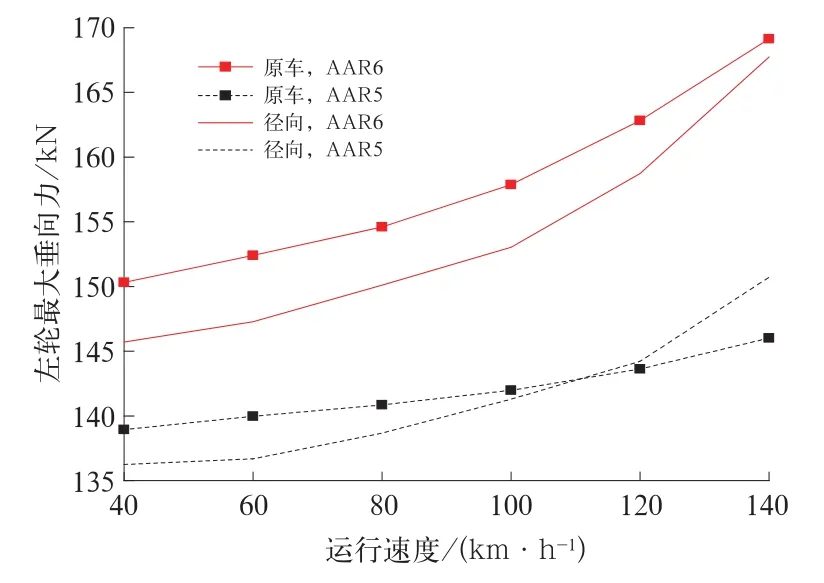
圖8 機車直線運行最大左輪垂向力比較

圖9 光滑曲線軌道磨耗功比較
可得出以下結論:(1)除了R300曲線通過速度大于90 km/h外,在計算范圍內,徑向轉向架機車磨耗功和輪緣磨耗因子改善百分比都大于60%。(2)隨著曲線半徑的增大,磨耗改善的百分比增加,不過大半徑原車磨耗的基數比較小。(3)輪緣磨耗因子比磨耗功改善得更多,曲線半徑大于600 m后,輪緣磨耗改善95%以上,說明徑向轉向架主要是降低輪緣磨耗。(4)相同半徑上,隨著曲線通過速度的提高,磨耗降低百分比減小,尤其在速度大于100 km/h后,說明徑向轉向架在100 km/h以下減磨效果顯著。
由于光滑軌道機車動力學指標都是優良,安全指標遠遠小于極限值,這里不給出具體數值。
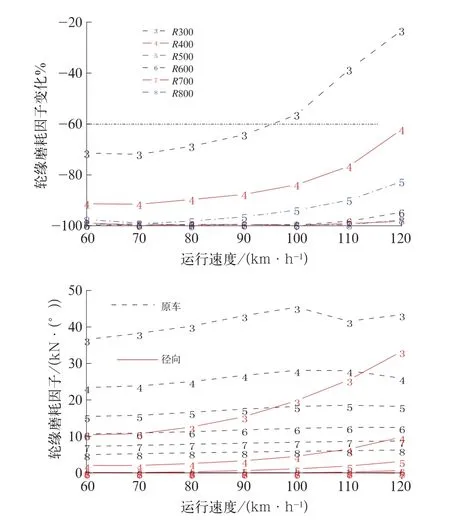
圖10 光滑曲線軌道輪緣磨耗因子比較
4.2 動態曲線通過性能
按照GB 50090-99《鐵路線路設計規范》選取R300、R600和R800半徑曲線困難條件為計算工況。機車動態曲線通過計算工況見表5,各工況動態曲線通過計算結果見表6(表6~表8中R600工況的上標表示軌道不平順級別)。計算結果說明:在R300曲線上,徑向轉向架機車搖頭角均值比原車顯著減小,其他各動力學指標的均值都比原車有不同程度降低;所有指標的最大值略降低。在R600曲線上,徑向轉向架機車各動力學指標的均值和統計最大值都比原車有不同程度降低。在R800曲線上,徑向轉向架機車各動力學指標的均值和統計最大值都比原車有不同程度降低。
由于通常采用平均磨耗來衡量磨耗,所以表7僅列出了第一輪對外輪磨耗功和輪緣磨耗因子的均值。各工況下,徑向轉向架機車輪緣磨耗都降低60%以上,車輪磨耗功降低47%以上。結果顯示磨耗降低程度與線路不平順有關,與曲線半徑、通過速度等因素有關。
表8是曲線通過時的橫向、垂向平穩性指標和加速度及變化百分比。可見,由于車體減重、一系懸掛參數改變和采用徑向機構,徑向轉向架各方案車體橫向和垂向加速度都增大;而橫向和垂向平穩性指標都比原車略改善,尤其是橫向平穩性指標在R300,垂向平穩性指標在R800時。徑向轉向架機車各工況橫向平穩性指標、橫向加速度和垂向加速度都在優良范圍。
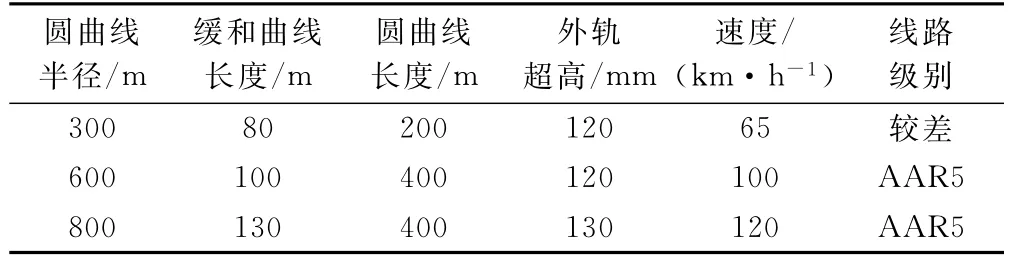
表5 動態曲線通過計算工況
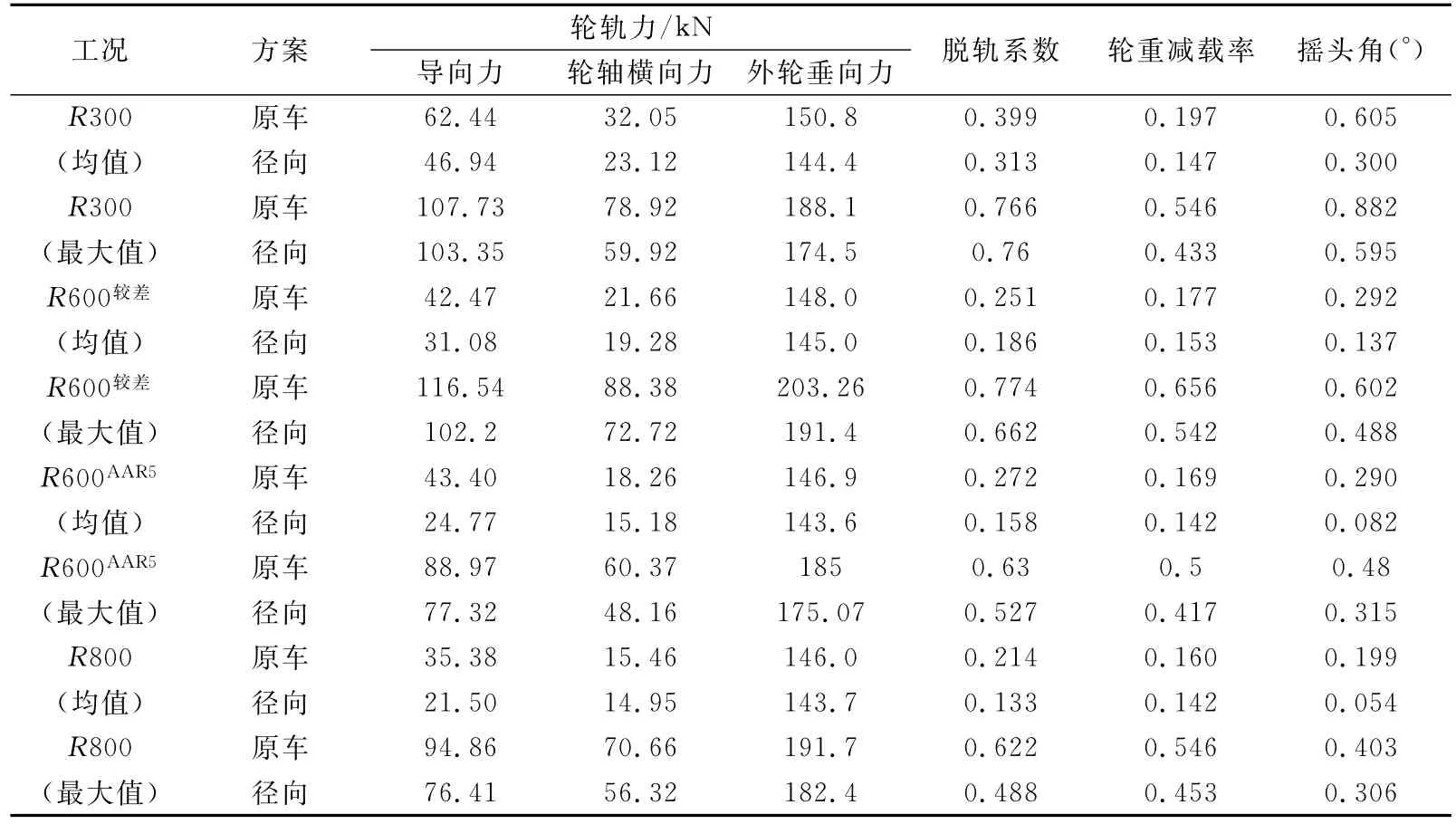
表6 動態曲線通過性能比較

表7 曲線通過性能磨耗計算結果及變化百分比
5 結 論
通過對C0-C0軸式HXD1C型徑向轉向架機車與傳統轉向架機車的整車動力學比較分析,得出以下結論:
(1)采用徑向轉向架后,機車的臨界速度降低,但機車理論上的非線性臨界速度180 km/h,滿足穩定性要求。
(2)機車的平穩性要視實際線路的情況而定。徑向轉向架機車橫向平穩性指標和加速度都比原車略增大,但都達到優良級別。垂向平穩性指標和加速度比原車都降低。在100 km/h速度以下時,直線運行最大輪軸橫向力和最大垂向力比原車減小。
(3)徑向轉向架機車可以安全地通過大、中、小半徑困難條件的曲線,除了通過曲線時車體橫向和垂向加速度外,曲線通過性能優于原車。
(4)雖然機車一系懸掛較硬,采用徑向轉向架仍然能顯著地降低輪緣磨耗,在100 km/h以下減磨效果明顯。各計算工況下,徑向轉向架機車輪緣磨耗都降低60%以上,車輪磨耗功降低47%以上。值得一提的是與SS3B型電力機車徑向轉向架完全避免輪緣磨耗不同,HXD1C型徑向轉向架允許輪緣少量磨耗,使踏面、輪緣均勻磨耗,更有利于車輪旋修。
[1] 周建斌,陳清明,王平華.HXD1C型大功率交流傳動電力機
車轉向架[J].電力機車與城軌車輛,2011,34(6):7-9,14.
[2] 康明明,樊運新.HXD1C型大功率交流傳動電力機車概述[J].電力機車與城軌車輛,2011,34(3):5-8.
[3] 王坤全.徑向轉向架提速貨運機車的動力學性能、牽引性能和曲線通過性能[J].鐵道機車車輛,2004,24(增刊):26-30.
[4] 謝 青.徑向轉向架技術在電力機車上的推廣運用[J].機車電傳動,2006,2006(6):4-7.
[5] 王坤全,羅 赟,張紅軍.一種徑向轉向架導向耦合裝置:中國,CN 201825051 U[P].2011-05-11.
[6] 西南交通大學機車徑向轉向架可行性研究課題組.機車徑向轉向架可行性研究論文集[C].1994.
Dynamic Performances Comparison of Type HXD1C Electric Locomotives with Conventional and Radial Bogies
WEI Jing1,LUO Yun1,WANG Kunquan2
(1 Traction Power State Key Laboratory,Southwest Jiaotong University,Chengdu 610031 Sichuan,China;2 Technology Center,CSR Ziyang Electric Locomotive Co.,Ltd.,Ziyang 641301 Sichuan,China)
Models of type HXD1C electric locomotive of six axles(i.e.2C0)is established by SIMPACK to improve the wheel flange wear for heavy hauling locomotive.Comparisons are made with regard to the stability and running performances on tangent or curved tracks of the locomotive with conventional and radial bogies.It is showed that the locomotive of 2C0 axles with radial bogies can meet the running need at 120 km/h.The riding quality index of it is good.The curving performances are superior to the locomotive with conventional bogies except lateral and vertical accelerations.The wheel flange wear is remarkably reduced,especially under the speed of 100 km/h.The wheel flange wear decreases by above 60%and the wheel wear work decreases by above 47%under every calculated condition.
HXD1C type electric locomotive;radial steering bogie;dynamics
U266.1
A
10.3969/j.issn.1008-7842.2014.04.05
1008-7842(2014)04-0024-05
?)女,碩士生(
2013-12-11)
猜你喜歡
湖南大學學報·自然科學版(2025年6期)2025-07-16 00:00:00
裝備制造技術(2021年5期)2021-08-14 01:44:56
裝備制造技術(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
經濟技術協作信息(2018年18期)2019-01-23 07:17:20
西南交通大學學報(2018年5期)2018-11-08 10:58:26
現代城市軌道交通(2018年5期)2018-05-28 02:19:35
現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(2015年3期)2015-12-23 09:27:14