基于倒譜的運(yùn)動模糊圖像參數(shù)估計方法
2014-03-24 02:38:42
海軍航空大學(xué)學(xué)報 2014年5期
(海軍航空工程學(xué)院基礎(chǔ)部,山東煙臺264001)
圖像在形成、傳輸和存儲的過程中,由于受多種因素的影響,圖像的質(zhì)量會有所下降,這一過程稱為圖像的退化或降質(zhì)。如果想提取圖像中的有用信息,就需要對退化圖像進(jìn)行復(fù)原。圖像復(fù)原是研究怎樣從退化的圖像中復(fù)原出原始的清晰圖像,也就是要根據(jù)已有的退化圖像和估計的退化因子反演推導(dǎo)出原始的圖像。退化因子即是需要估計退化過程的點(diǎn)擴(kuò)展函數(shù)(Point Spread Function,PSF)。對于運(yùn)動模糊退化,需要估計出運(yùn)動模糊PSF 中的2個參數(shù)——模糊尺度和模糊方向。
運(yùn)動模糊參數(shù)估計主要有2類方法:一類是基于空域的參數(shù)估計方法[1-5];一類是基于頻域的參數(shù)估計方法[6-9]。基于空域的參數(shù)識別方法利用退化圖像中的點(diǎn)、線和邊緣等信息,當(dāng)模糊尺度較大時,識別的誤差也很大[4]。而基于頻域的參數(shù)識別的方法受噪聲影響嚴(yán)重[8,10]。
本文分析了運(yùn)動模糊PSF的倒譜特性,得到基于倒譜的參數(shù)估計方法。并通過數(shù)值實驗驗證該方法的有效性。
1 運(yùn)動模糊退化的數(shù)學(xué)模型
圖像退化的一般模型可表示為[11]

式(1)中:g(x,y)、f(x,y)和h(x,y)分別為退化圖像、原始圖像和退化系統(tǒng)的PSF;n(x,y)表示噪聲。不同的退化系統(tǒng)對應(yīng)著不同的h(x,y)。
用攝像機(jī)獲取景物圖像時,由于相機(jī)曝光時景物和攝像機(jī)之間有相對運(yùn)動而形成圖像模糊現(xiàn)象稱為運(yùn)動模糊。運(yùn)動模糊的PSF可以表示為:

式中,θ為模糊方向與x軸夾角。
如式(2)所示,運(yùn)動模糊PSF依賴于2個參數(shù)——模糊尺度L 和模糊方向θ,因而對運(yùn)動模糊PSF的估計就是對這2個參數(shù)進(jìn)行估計。其傅里葉變換結(jié)果H(u,v)為

式中,ω=u cos θ+v sin θ。
2 倒譜定義及性質(zhì)
給定二維函數(shù)h(x,y),其倒譜的計算公式為[6]

式中,?表示傅里葉變換。
倒譜可以看做從h(x,y)到C(p,q)的變換,如果用C{·}來表示倒譜變換,則

由于二維傅里葉變換?是可分的[11](即對二維函數(shù)f(x,y)做?變換,可先對x(或y)做?變換,再對y(或x)做?變換)以及式(5)中絕對值的存在,算子C{·}為非線性可分算子。由?變換的性質(zhì)很容易推導(dǎo)出倒譜變換的性質(zhì):
1)旋轉(zhuǎn)。如果C{h(r,θ)}=C(ρ,φ),則

即函數(shù)旋轉(zhuǎn),倒譜也隨之旋轉(zhuǎn),且旋轉(zhuǎn)的角度值相同。
2)平移。因為

所以

即原函數(shù)經(jīng)平移后的倒譜與原函數(shù)的倒譜相同。
3)可分函數(shù)的倒譜。倒譜算子C{·}的一個重要性質(zhì)為它的分離特性(對可分函數(shù)),下面進(jìn)行分析。假設(shè)h(x,y)為可分函數(shù),即

則h(x,y)二維?變換可轉(zhuǎn)化為對h1(x)和h2(y)的一維?變換。記:

則

從而,
函數(shù)1(t)表示對所有的自變量t,函數(shù)值都為1。最后,做?-1變換得
即

倒譜算子C{·}的分離特性來自于?-1{1(t)}。由?變換可知?-1{1(u)}=δ(p),?-1{1(v)}=δ(q),因而等式可改寫為

這說明可分函數(shù)的倒譜只出現(xiàn)在倒譜域的坐標(biāo)軸(p=0,q=0)上,與x相關(guān)部分出現(xiàn)在p軸上,與y相關(guān)部分出現(xiàn)在q軸上。
綜合以上3條性質(zhì)可得:分析可分函數(shù)的倒譜時,只須通過函數(shù)在倒譜域坐標(biāo)軸上的倒譜值和坐標(biāo)軸的旋轉(zhuǎn)角度即可。
3 基于倒譜特性的參數(shù)估計
由式(2),運(yùn)動模糊PSF為常值函數(shù),顯然為變量可分離函數(shù)。可以通過倒譜域的坐標(biāo)軸上圖像可分析出運(yùn)動運(yùn)動模糊PSF中的參數(shù)信息。
在忽略噪聲的情況下,根據(jù)式(1),有

這樣,模糊圖像在時域為原圖像和模糊核的卷積,變換到倒譜域之后為原圖像的倒譜與PSF的倒譜之和。空間域的卷積在倒譜域變成了加法,可以比較容易地分離出模糊信息。為使H(u,v)=0時式(4)有意義,實際應(yīng)用中圖像的倒譜通常用下式計算[12]:

圖1以lena圖像為例,給出了原始圖像的倒譜,運(yùn)動模糊方向45°,模糊尺度為20個像素時的PSF的倒譜,以及運(yùn)動模糊圖像的倒譜。從圖1b)中可以看出,原始圖像的倒譜比較復(fù)雜,除中心亮點(diǎn)外,其能量分布均勻;圖1c)中,PSF的倒譜在延模糊方向(45°)上出現(xiàn)周期性亮點(diǎn);第一個亮點(diǎn)到中心的距離為20,意味著模糊尺度為20 像素,到中心的距離為40 像素處的第二個亮點(diǎn)為第一個諧波,諧波的產(chǎn)生是由于數(shù)值計算采用離散?變換(DFT)造成的;圖1d)中,模糊圖像的倒譜為原圖像倒譜與PSF的倒譜之和,由于原始圖像的倒譜值集中在中心點(diǎn)附近(低頻區(qū)域),故模糊圖像的倒譜特征與PSF的倒譜特征相似,在沿模糊方向(45°)上出現(xiàn)周期性亮點(diǎn)。所以,可利用模糊圖像的倒譜特征估計模糊參數(shù)。
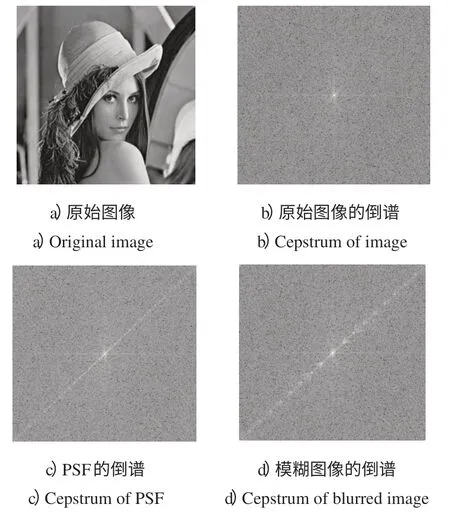
圖1 PSF與模糊圖像的倒譜Fig.1 Cepstrem of PSF and blurred image
Radon變換[11]用來計算二維圖像矩陣在某個方向上的投影,定義如下:
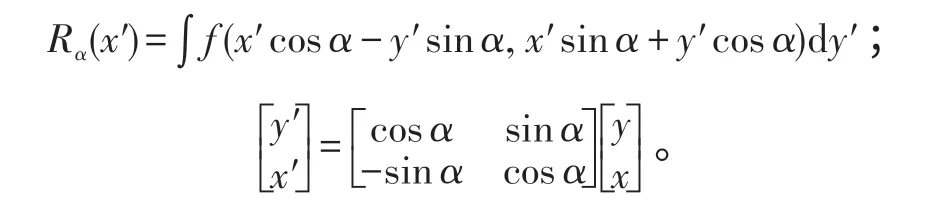
該投影即是在某一方向的線積分,反映了圖像在不同方向上的投影性質(zhì)。Radon變換一個重要的性質(zhì)就是檢測圖像中的直線的方向,可以用Radon變換精確地檢測出亮條紋的方向。若Radon變換中沿某個方向上的積分很大,則表明在與該方向垂直的方向上存在直線。圖2給出了Radon變換檢測直線方向的結(jié)果。當(dāng)直線與水平方向成45°時,Radon變換的最大值出現(xiàn)在135°方向,與直線方向垂直。
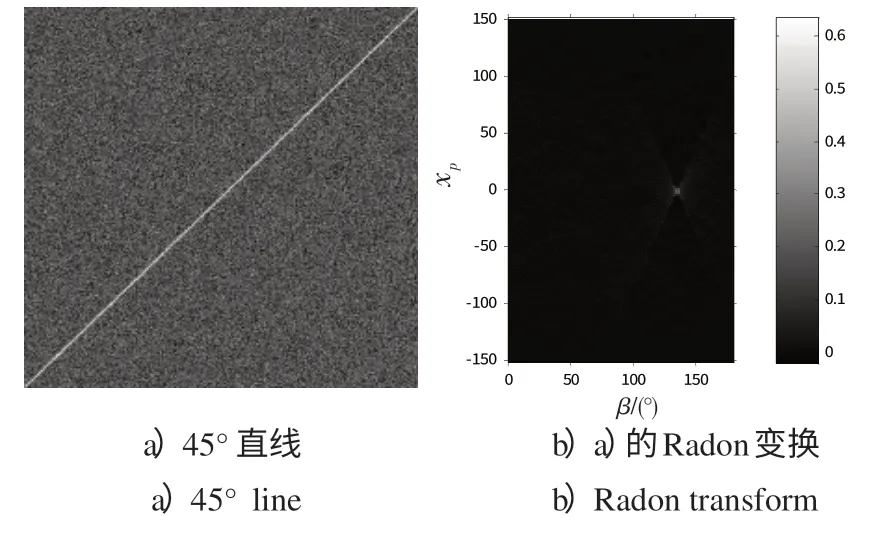
圖2 Radon變換結(jié)果Fig.2 Results of Radon transform
綜上,基于倒譜特性的參數(shù)估計方法如下:
1)運(yùn)動模糊圖像的倒譜在其模糊方向上有不斷衰減的周期性亮點(diǎn)出現(xiàn),其中離中心最近的亮點(diǎn)到中心的距離等于運(yùn)動模糊尺度L[6]。
2)對于模糊方向θ的估計,可利用Radon變換。記α為找到變換結(jié)果最大值出現(xiàn)的方向,則運(yùn)動模糊的方向θ=α-90°。
至此,PSF 中的運(yùn)動模糊尺度L 和模糊方向θ 已全部估計出來。
4 數(shù)值實驗
下面通過數(shù)值實驗檢驗該方法的準(zhǔn)確性和抗噪聲干擾能力。
圖3為基于倒譜的模糊方向檢測結(jié)果,圖3a)為原始lena圖像,對圖3a)施加方向為45°、尺度為20像素的運(yùn)動模糊得到圖3b)。運(yùn)動模糊圖像的倒譜如圖3c)所示,對圖3c)進(jìn)行二值化處理得圖3d)。圖3e)是對圖3d)進(jìn)行Radon變換的結(jié)果,圖3f)為圖3e)的極大值曲線,從圖3f)中可以看出Radon變換的最大值出現(xiàn)在135°方向,所以運(yùn)動模糊方向為135°-90°=45°。
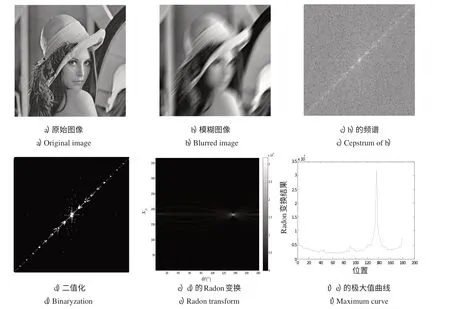
圖3 基于倒譜的模糊方向檢測Fig.3 Detection of blur direction
接下來估計模糊尺度。對于這種任意模糊方向的模糊,一般先將運(yùn)動模糊方向旋轉(zhuǎn)至水平方向,然后在水平方向估計模糊尺度,這樣方便進(jìn)行模糊尺度的估計。
圖4為基于倒譜的模糊尺度檢測的結(jié)果。將倒譜(圖3c))順時針旋45°,使其變成在水平方向上的運(yùn)動模糊得到圖4a)。由于倒譜具有中心對稱性,可以只考慮右半部分,由中心到第一個亮點(diǎn)的距離為運(yùn)動模糊距離L。提取出圖4a)中的亮條紋如圖4b),第一個亮點(diǎn)(坐標(biāo)為204)到中心點(diǎn)(坐標(biāo)為183)的距離為L=204-183=21個像素,與真實值的誤差為1個像素。

圖4 基于倒譜的模糊尺度檢測Fig.4 Detection of blur scale
當(dāng)加入均值為0、方差為25的高斯噪聲時,模糊尺度固定為20個像素,模糊方向變化范圍在0°~180°,對于模糊方向的檢測結(jié)果如表1所示。相同的噪聲條件下,運(yùn)動模糊方向固定為45°,模糊尺度變化范圍為5~20個像素,對于模糊尺度的檢測結(jié)果如表2所示。從表1、2中可以看出,模糊尺度的檢測誤差在1°內(nèi),模糊尺度的檢測誤差在2個像素內(nèi),精度很高,證明該方法具有較強(qiáng)的魯棒性。
表1 模糊方向檢測結(jié)果(L=20)Tab.1 Detection results of blur direction(L=20)
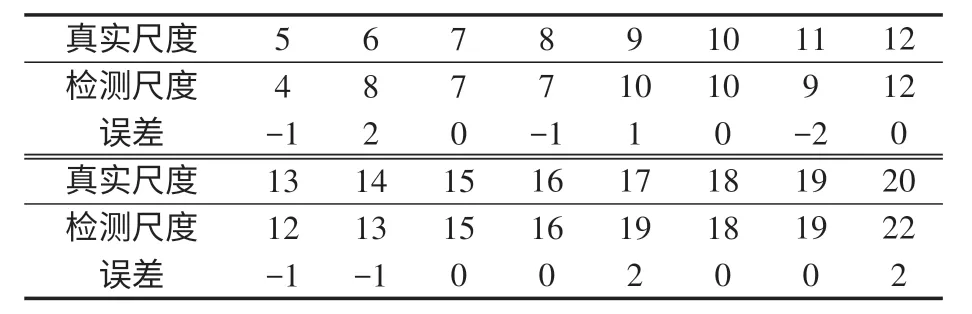
表2 模糊尺度檢測結(jié)果(θ=45°)Tab.2 Detection results of blur scale(θ=45°)
5 結(jié)論
本文提出了基于倒譜的運(yùn)動模糊參數(shù)估計方法。首先,分析了運(yùn)動模糊點(diǎn)擴(kuò)展函數(shù)的倒譜性質(zhì),得出運(yùn)動模糊圖像的倒譜會在模糊方向上出現(xiàn)峰值,實驗結(jié)果驗證了理論分析的準(zhǔn)確性。接下來,提出基于倒譜的參數(shù)估計方法,利用Radon變換檢測出亮條紋的方向即是運(yùn)動模糊的方向,第1個亮條紋與中心的距離即是模糊的長度。最后,通過數(shù)值實驗驗證了該方法的準(zhǔn)確性和魯棒性。
在估計模糊尺度時,本文采用的方法是測量中心到右側(cè)第一個亮條紋的距離為模糊尺度。事實上,各個亮條紋之間的距離是相等的,都等于模糊尺度。下一步可以采取測量多個亮條紋之間的距離取平均的方法來進(jìn)一步提高模糊尺度的估計精度。
[1]ARASHLOO SR,AHMADYFARD A.Fine estimation of blur parmeters for image restoration[C]//15th International Conference on Digital Signal Processing.2007:427-430.
[2]CHALMOND B.PSF estimation for image deblurring[J].Graphical Models and Image Processing,1991,53(4):364-372.
[3]YITZHAKY Y,KOPEIKA NS.Identification of blur parameters from motion-blurred images[J].Graphical Models and Image Processing,1997,59(5):310-320.
[4]WU S,LIN W,XIE S,et al.Blind blur assessment for vision-based applications[J].Journal of Visual Communication and Image Representation,2009,20(4):231-41.
[5]KIM SK,PARK SR,PAIK JK.Simultaneous out-of-focus blur estimation and restoration for digital auto-focusing system[J].IEEE Transactions on Consumer Electronics,1998,44(3):1071-5.
[6]ROM R.On the cepstrum of two-dimensional functions[J].IEEE Transactions on Information Theory,1975,21(2):214-7.
[7]CANNON M.Blind deconvolution of spatially invariant image blurs with phase[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1976,24(1):58-63.
[8]KUNDUR D,HATZINAKOS D.Blind image deconvolution[J].Signal Processing Magazine,1996,13(3):43-64.
[9]KANG X,PENG Q,THOMAS G,et al.Blind image restoration using the cepstrum method[C]//Canadian Conference on Electrical and Computer Engineering.2006:1952-1955.
[10]FABIAN R,MALAH D.Robust identification of motion and out-of-focus blur parameters from blurred and noisy images[J].Graphical Models and Image Processing,1991,53(5):403-12.
[11]RAFAEL C GONZALEZ,RICHARD E WOODS.數(shù)字圖像處理[M].3版.北京:電子工業(yè)出版社,2007:232-235.
RAFAEL C GONZALEZ,RICHARD E WOODS.Digital image processing[M].3rd ed.Publishing House of Electronics Industry,2007:232-235.(in Chinese)
[12]WU S,LU Z,ONG EP,et al.Blind image blur identification in cepstrum domain[C]//Proceedings of 16th International Conference on Computer Communications and Networks.2007:1166-1171.
猜你喜歡
計算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
計算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56