二維和三維弓網(wǎng)耦合動(dòng)力學(xué)模型適用性分析*
2014-03-24 03:54:36王世軒呂青松李瑞平梅桂明張衛(wèi)華
鐵道機(jī)車車輛 2014年3期
王世軒,呂青松,李瑞平,周 寧,梅桂明,張衛(wèi)華
(西南交通大學(xué)牽引動(dòng)力國(guó)家重點(diǎn)實(shí)驗(yàn)室,四川成都610031)
鐵路供電技術(shù)
二維和三維弓網(wǎng)耦合動(dòng)力學(xué)模型適用性分析*
王世軒,呂青松,李瑞平,周 寧,梅桂明,張衛(wèi)華
(西南交通大學(xué)牽引動(dòng)力國(guó)家重點(diǎn)實(shí)驗(yàn)室,四川成都610031)
針對(duì)二維和三維弓網(wǎng)耦合動(dòng)力學(xué)模型,根據(jù)接觸網(wǎng)模態(tài)、接觸壓力、接觸線抬升位移、弓頭振動(dòng)加速度及其頻譜特性,分析了兩種模型在弓網(wǎng)耦合動(dòng)力學(xué)仿真中的區(qū)別;采用三維弓網(wǎng)模型分析了接觸網(wǎng)在橫風(fēng)作用時(shí),接觸線風(fēng)振位移對(duì)弓網(wǎng)接觸壓力的影響。計(jì)算結(jié)果表明二維和三維弓網(wǎng)模型獲得的仿真結(jié)果基本一致,弓網(wǎng)橫向相對(duì)運(yùn)動(dòng)對(duì)其垂向動(dòng)力學(xué)行為影響較小;三維模型適用于橫風(fēng)條件下的弓網(wǎng)動(dòng)力學(xué)仿真,橫風(fēng)載荷對(duì)弓網(wǎng)接觸壓力具有顯著影響,導(dǎo)致弓網(wǎng)受流質(zhì)量變差。
接觸網(wǎng);受電弓;耦合動(dòng)力學(xué)模型;適用性;頻譜;橫風(fēng)載荷
弓網(wǎng)受流作為高速鐵路關(guān)鍵技術(shù)之一,對(duì)列車運(yùn)行的安全性和可靠性具有重要影響。列車運(yùn)行過(guò)程中,受電弓與接觸網(wǎng)在高速滑動(dòng)過(guò)程中完成取流,因此,弓網(wǎng)系統(tǒng)的動(dòng)力學(xué)性能對(duì)受流質(zhì)量起到了決定性作用。國(guó)內(nèi)外學(xué)者采用不同的建模和仿真技術(shù)對(duì)弓網(wǎng)耦合動(dòng)力學(xué)仿真開(kāi)展了深入研究,從而建立了不同類型的弓網(wǎng)耦合動(dòng)力學(xué)仿真模型。Simeon等將接觸線和承力索分別考慮成歐拉梁和索,受電弓考慮成質(zhì)量塊模型,建立了弓網(wǎng)耦合動(dòng)力學(xué)模型[1-2];張衛(wèi)華等利用Fourier展開(kāi)和模態(tài)技術(shù),由第2類朗格朗日方程推導(dǎo)了接觸網(wǎng)運(yùn)動(dòng)微分方程[3-4];Collina等采用有限元法建立了接觸網(wǎng)模型,將受電弓滑板考慮成彈性體,框架視為集中質(zhì)量,從而建立了能夠反映高頻響應(yīng)的弓網(wǎng)耦合動(dòng)力學(xué)模型[5-6],然而,上述弓網(wǎng)仿真模型均為二維模型,忽略了接觸網(wǎng)與受電弓的橫向相對(duì)運(yùn)動(dòng)。周寧等建立了考慮拉出值的三維接觸網(wǎng)模型和剛?cè)峄旌鲜茈姽P停治隽藙傮w受電弓和剛?cè)峄旌鲜茈姽P驮趧?dòng)力學(xué)仿真中的差異[7];李瑞平等建立了三維接觸網(wǎng)模型,建立了接觸網(wǎng)脈動(dòng)風(fēng)場(chǎng),對(duì)接觸網(wǎng)風(fēng)振響應(yīng)進(jìn)行了詳細(xì)分析[8]。然而,二維和三維仿真模型對(duì)弓網(wǎng)動(dòng)力學(xué)仿真結(jié)果產(chǎn)生的差異以及兩種模型的適用性尚未研究,本文基于有限元方法,建立了二維和三維弓網(wǎng)耦合動(dòng)力學(xué)模型,根據(jù)接觸網(wǎng)模態(tài)、接觸壓力和弓頭振動(dòng)加速度等的差異,對(duì)兩類模型的適用性進(jìn)行了探討;最后,采用文中建立的三維弓網(wǎng)動(dòng)力學(xué)模型對(duì)接觸網(wǎng)存在橫風(fēng)載荷時(shí)的弓網(wǎng)動(dòng)力學(xué)性能進(jìn)行了分析,表明橫風(fēng)對(duì)弓網(wǎng)受流具有顯著影響。
1 受電弓—接觸網(wǎng)模型
1.1 接觸網(wǎng)模型
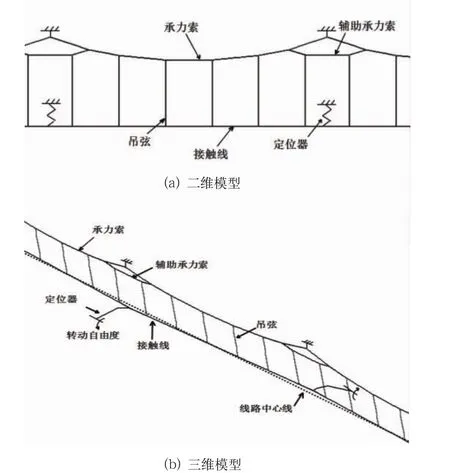
圖1 接觸網(wǎng)模型
針對(duì)彈性懸掛鏈型接觸網(wǎng),二維和三維接觸網(wǎng)模型,如圖1所示。二維接觸網(wǎng)模型主要包含接觸線、承力索、吊弦、輔助承力索、支撐桿和定位器,忽略了接觸網(wǎng)拉出值以及接觸線的橫向運(yùn)動(dòng)。其中,接觸線、承力索和輔助承力索采用歐拉梁離散,支撐桿和定位器采用彈簧單元模擬,吊弦采用可考慮松弛的雙線性單元模擬;三維接觸網(wǎng)模型為空間結(jié)構(gòu),考慮了接觸網(wǎng)的拉出值,為精確計(jì)算接觸網(wǎng)的橫向運(yùn)動(dòng),定位器采用歐拉梁模擬。
接觸網(wǎng)運(yùn)動(dòng)微分方程可表示為

式中[Mc],[Cc]和[Kc]分別為接觸網(wǎng)的質(zhì)量,阻尼和剛度矩陣;{y¨c},{y·c}和{yc}分別為接觸網(wǎng)的加速度,速度和位移向量;{Pcp(x,t)}為t時(shí)刻弓網(wǎng)接觸壓力向量。
1.2 受電弓模型
受電弓模型主要包括歸算質(zhì)量模型、多剛體模型、剛?cè)峄旌夏P偷取w算質(zhì)量模型是在受電弓某個(gè)高度對(duì)其進(jìn)行等效參數(shù)測(cè)試,從而將受電弓表示成集中質(zhì)量和彈簧、阻尼相連的等效模型,如圖2(a)所示。歸算質(zhì)量模型具有自由度少、計(jì)算效率高的優(yōu)點(diǎn),但只能反映弓網(wǎng)間的垂向運(yùn)動(dòng)關(guān)系。當(dāng)建立的接觸網(wǎng)具有拉出值即三維接觸網(wǎng)模型時(shí),接觸線和受電弓滑板則具備了橫向的相對(duì)運(yùn)動(dòng),受電弓歸算質(zhì)量模型難以應(yīng)用,為此,受電弓建模時(shí)需將滑板考慮成真實(shí)結(jié)構(gòu),文中為提高計(jì)算效率,將受電弓框架部分仍用歸算質(zhì)量模型,如圖2(b)所示。
受電弓運(yùn)動(dòng)微分方程可表述為:

式中[Mp],[Cp]和[Kp]分別為受電弓的質(zhì)量,阻尼和剛度矩陣;{y¨p},{y·p}和{yp}分別為受電弓的加速度,速度和位移向量;;{Pcp(x,t)}為t時(shí)刻弓網(wǎng)接觸壓力向量;{F0}為受電弓靜態(tài)抬升力向量。
1.3 弓網(wǎng)耦合模型
受電弓與接觸網(wǎng)之間通過(guò)接觸壓力形成耦合動(dòng)力學(xué)系統(tǒng),使用接觸單元實(shí)現(xiàn)滑板與接觸線的耦合行為,如圖3所示。在滑板與接觸線的接觸區(qū)域檢查兩者是否發(fā)生穿透。當(dāng)未發(fā)生穿透時(shí),接觸力為0;當(dāng)發(fā)生穿透時(shí),通過(guò)接觸剛度以及受電弓與接觸線在接觸點(diǎn)處的位移計(jì)算得到接觸壓力。
為此,接觸壓力的數(shù)學(xué)表述如下:

式中ycc和ypc分別為接觸線和受電弓在接觸點(diǎn)處的垂向位移,Ks為接觸剛度。
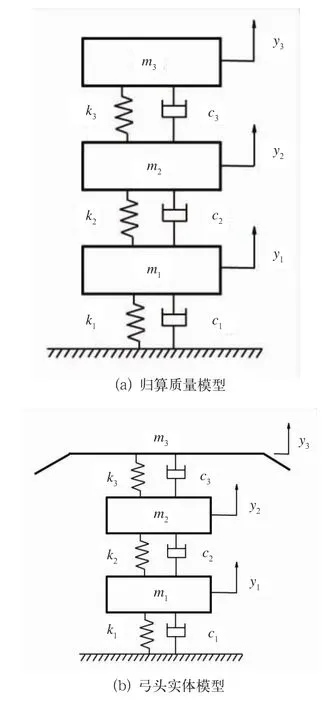
圖2 受電弓模型
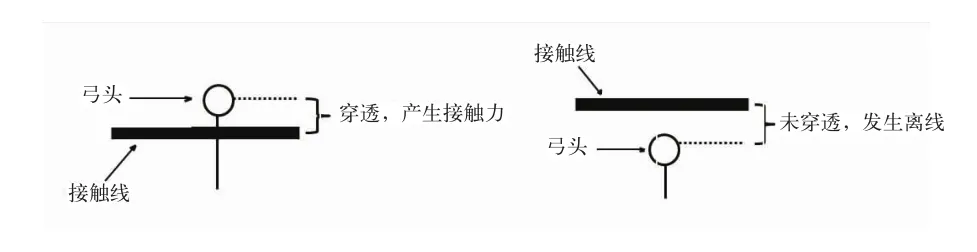
圖3 弓網(wǎng)耦合示意圖
2 計(jì)算結(jié)果
2.1 模態(tài)特性
模態(tài)是結(jié)構(gòu)的固有屬性,反映了結(jié)構(gòu)自身的固有振動(dòng)特性,準(zhǔn)確計(jì)算結(jié)構(gòu)的模態(tài)特征對(duì)其動(dòng)力學(xué)分析有重要意義。二維接觸網(wǎng)由于其平面的特性,各階模態(tài)表現(xiàn)為接觸網(wǎng)垂向的振動(dòng)特性。三維接觸網(wǎng)由于其空間特性,除了接觸網(wǎng)的垂向振動(dòng)以外,還具備了橫向振動(dòng)特性。根據(jù)武廣高鐵的接觸網(wǎng)參數(shù),建立了16跨為一個(gè)錨段的二維和三維接觸網(wǎng)模型,并進(jìn)行了相應(yīng)的模態(tài)分析。
接觸網(wǎng)各階垂向模態(tài)頻率,如表1所示,前6階垂向模態(tài)振型,如圖4所示。由表可知,接觸網(wǎng)屬于低頻系統(tǒng),且模態(tài)頻率較為密集;三維接觸網(wǎng)模型由于存在橫向振動(dòng),因此,同一垂向模態(tài)振型對(duì)應(yīng)的頻率略低于二維接觸網(wǎng)模型的結(jié)果,但垂向模態(tài)振型是一致的。由接觸網(wǎng)各階垂向模態(tài)振型可知,接觸網(wǎng)第1階垂向模態(tài)振型為1個(gè)半波,第2階為1個(gè)整波,第3階為3個(gè)半波,第4階為2個(gè)整波,依次類推,故接觸網(wǎng)的垂向模態(tài)振型具有一定的規(guī)律性。
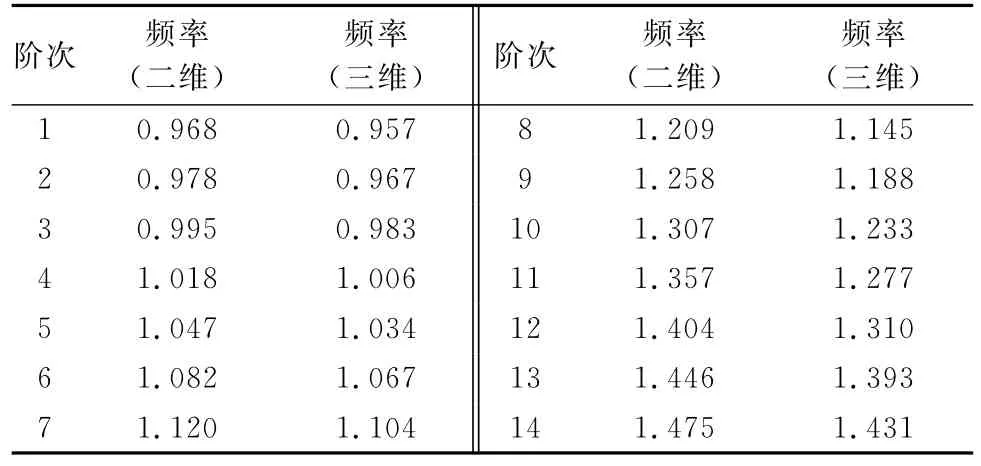
表1 接觸網(wǎng)垂向模態(tài)頻率Hz
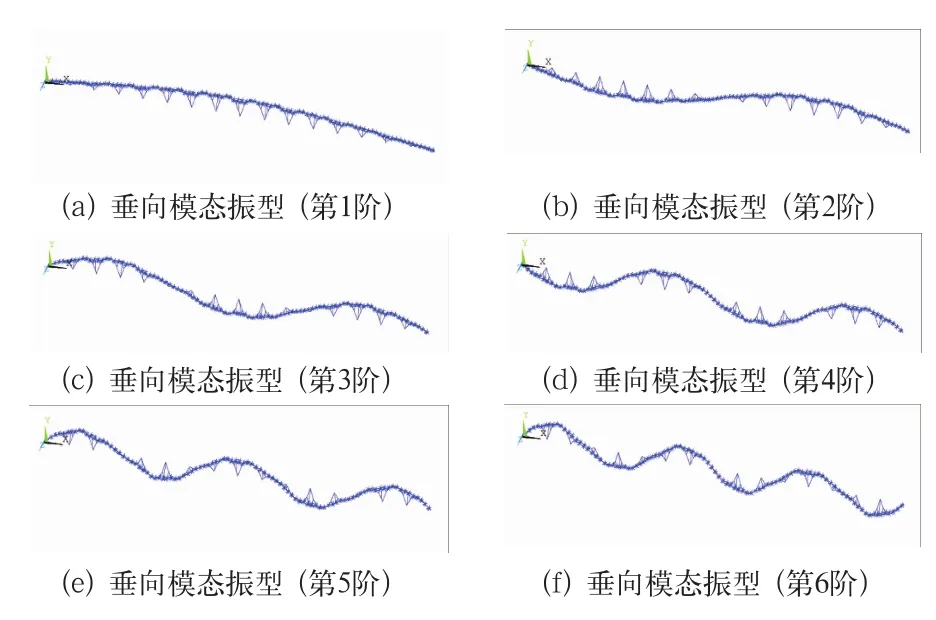
圖4 接觸網(wǎng)垂向模態(tài)振型
三維接觸網(wǎng)存在橫向振動(dòng)特性,其各階橫向模態(tài)頻率,如表2所示,前6階模態(tài)振型,如圖5所示。由接觸網(wǎng)各階橫向模態(tài)振型可知,接觸網(wǎng)的橫向模態(tài)雖然同樣表現(xiàn)為半波整數(shù)倍的形式,但橫向模態(tài)的頻率階次與振型并不存在明顯的規(guī)律性。此外,某些模態(tài)振型不僅存在垂向振動(dòng)特性,而且具備了橫向振動(dòng)特性,即出現(xiàn)了垂向和橫向的耦合振動(dòng)。因此,從接觸網(wǎng)模態(tài)特征看,二維接觸網(wǎng)模型缺少了橫向以及垂向和橫向耦合振動(dòng)行為,但二維和三維接觸網(wǎng)模型的垂向振動(dòng)特征基本一致。
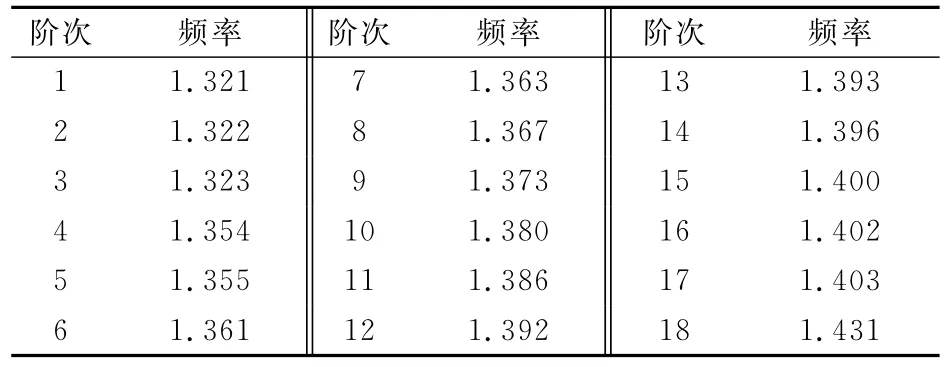
表2 觸網(wǎng)橫向模態(tài)頻率Hz
2.2 動(dòng)力學(xué)特性
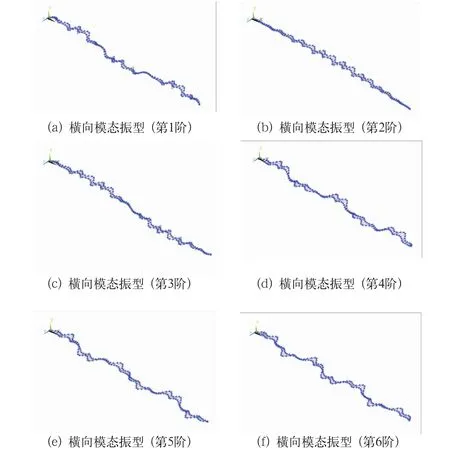
圖5 接觸網(wǎng)橫向模態(tài)振型

圖6 弓網(wǎng)接觸壓力時(shí)程
利用文中建立的二維和三維弓網(wǎng)耦合動(dòng)力學(xué)模型,對(duì)列車運(yùn)行速度分別為300 km/h和400 km/h進(jìn)行了仿真分析,按照EN 50318的弓網(wǎng)仿真標(biāo)準(zhǔn)對(duì)計(jì)算結(jié)果進(jìn)行了20 Hz低通濾波。二維和三維模型計(jì)算得到的弓網(wǎng)接觸壓力時(shí)程,如圖6所示。由圖6可知,采用二維和三維弓網(wǎng)動(dòng)力學(xué)模型計(jì)算得到的接觸壓力變化規(guī)律較為一致。為更好地分析計(jì)算結(jié)果,對(duì)接觸壓力的統(tǒng)計(jì)數(shù)據(jù)進(jìn)行了比較,如表3所示。由表3可知,速度300 km/h時(shí),平均值、標(biāo)準(zhǔn)差、最大值的差異均小于1 N,最小值的差異小于7 N;速度400 km/h時(shí),平均值和標(biāo)準(zhǔn)差的差異小于1 N,最大值的差異小于3 N,最小值的差異小于8 N,由此可知,采用二維和三維弓網(wǎng)動(dòng)力學(xué)模型獲得的接觸壓力的結(jié)果較為一致,受電弓與接觸網(wǎng)橫向相對(duì)運(yùn)動(dòng)對(duì)接觸壓力的影響較小。
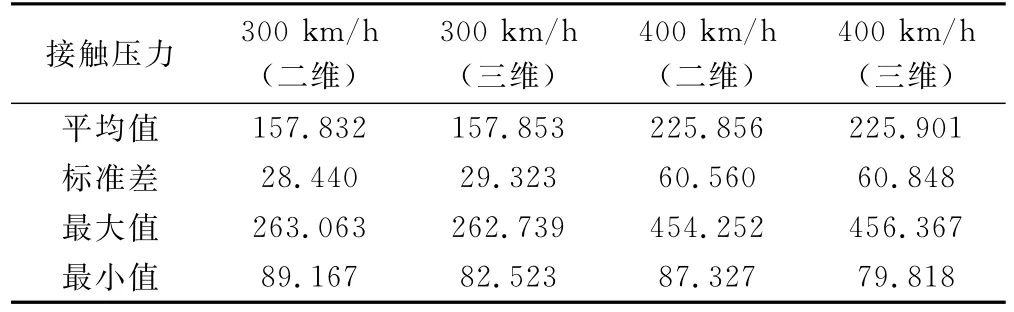
表3 接觸力統(tǒng)計(jì)值N
采用二維和三維弓網(wǎng)動(dòng)力學(xué)模型計(jì)算得到的定位器處的垂向位移和弓頭垂向加速度,如圖7和圖8所示。由圖可知,采用二維和三維模型獲得的定位器垂向位移和弓頭垂向加速度,其變化規(guī)律和幅值基本一致。弓網(wǎng)動(dòng)力學(xué)仿真時(shí),需統(tǒng)計(jì)接觸線定位器處的最大抬升位移以及受電弓弓頭垂向振動(dòng)加速度,二維模型計(jì)算得到的定位器處的最大抬升位移和弓頭垂向加速度絕對(duì)值分別為57.66 mm和26.16 m/s2;三維模型計(jì)算的結(jié)果分別為57.43 mm和24.79 m/s2,因此,同樣可知二維和三維模型對(duì)接觸線垂向位移和弓頭垂向加速度計(jì)算結(jié)果的影響較小。

圖7 錨段中間定位點(diǎn)垂向位移
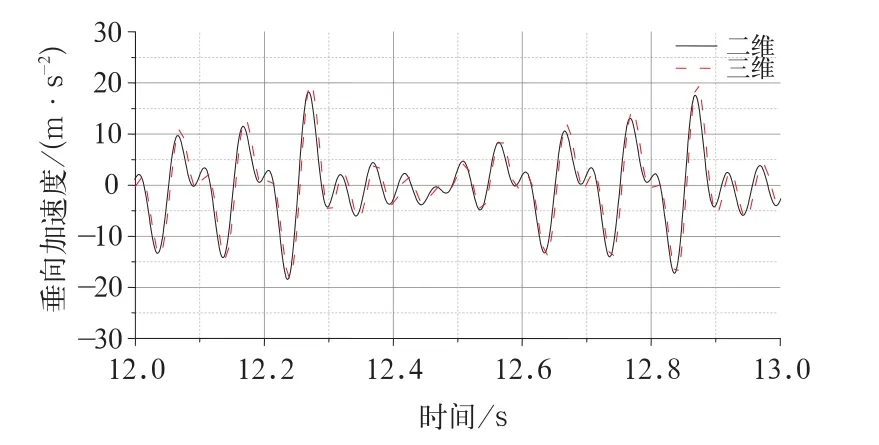
圖8 弓頭垂向加速度
2.3 頻譜特性
接觸網(wǎng)是以跨距為單位的周期性結(jié)構(gòu),同時(shí)吊弦的分布也具有一定的周期性,因此,當(dāng)列車以不同速度運(yùn)行時(shí),接觸網(wǎng)對(duì)受電弓存在不同的跨距激勵(lì)頻率和吊弦激勵(lì)頻率。頻率值可用f=v/l表示,其中,v為運(yùn)行速度,當(dāng)l為接觸網(wǎng)跨距時(shí),f即為跨距頻率;當(dāng)l為吊弦間距時(shí),f即為吊弦頻率。運(yùn)行速度為300 km/h和 400 km/h時(shí),武廣線接觸網(wǎng)的跨距頻率和吊弦頻率,如表4所示,由于吊弦不是等間距布置,因此,接觸網(wǎng)存在著多個(gè)吊弦頻率。
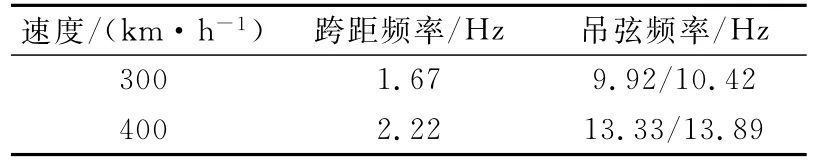
表4 跨距頻率與吊弦頻率Hz
對(duì)速度300 km/h及400 km/h下的弓網(wǎng)動(dòng)態(tài)接觸力及弓頭垂向加速度結(jié)果進(jìn)行頻譜分析,如圖9所示。由不同速度條件下的接觸壓力和弓頭加速度頻譜結(jié)果可知,二維和三維弓網(wǎng)動(dòng)力學(xué)模型獲得的頻譜特征較為一致。接觸壓力和弓頭振動(dòng)加速度主要來(lái)自跨距激勵(lì)頻率、吊弦激勵(lì)頻率及其倍頻的貢獻(xiàn)。
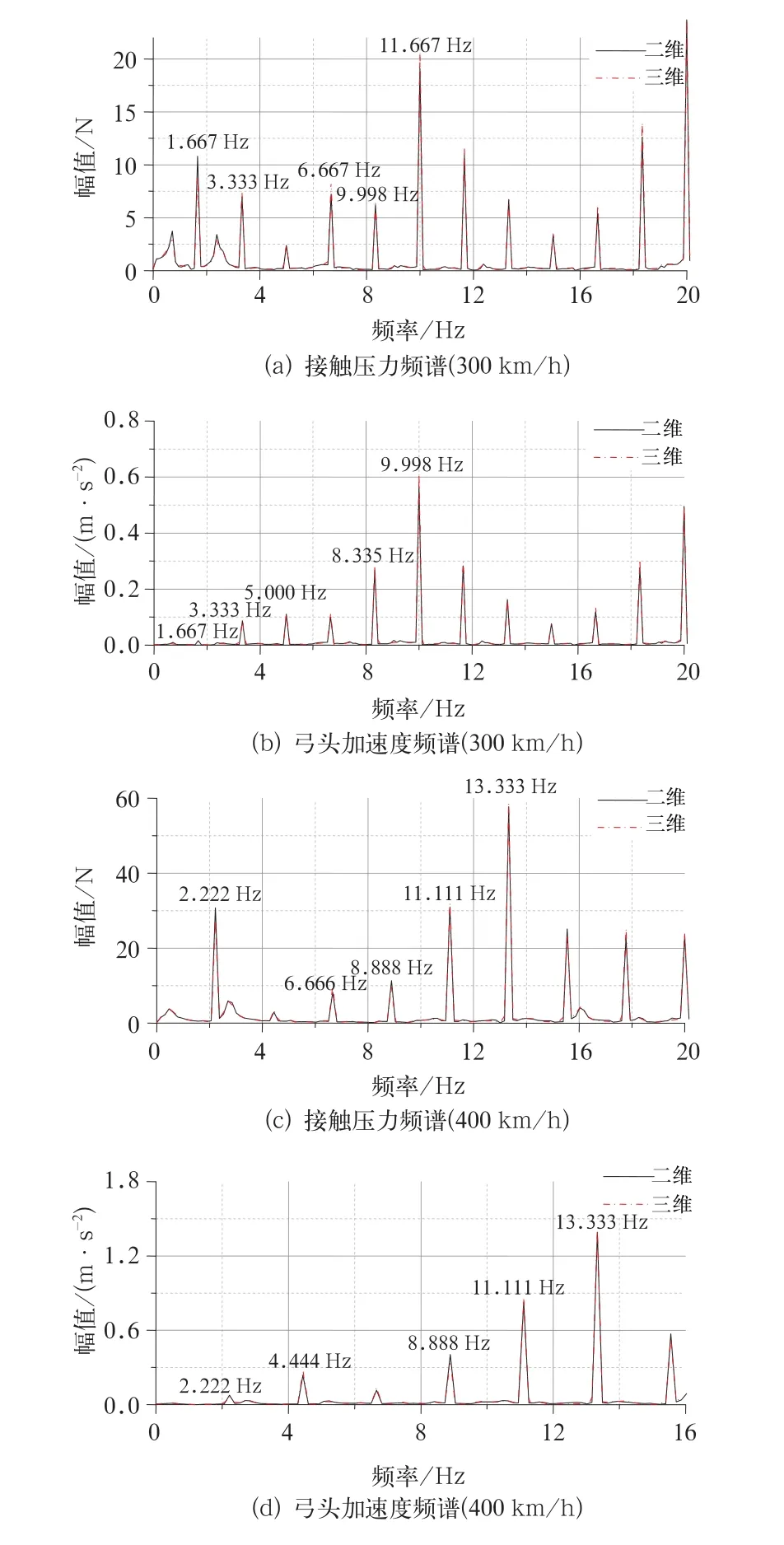
圖9 接觸壓力及弓頭加速度頻譜
由二維和三維弓網(wǎng)動(dòng)力學(xué)模型的模態(tài)特性、動(dòng)力學(xué)性能及其頻譜特征分析可知,進(jìn)行弓網(wǎng)動(dòng)力學(xué)分析時(shí),二維與三維模型引起的弓網(wǎng)垂向振動(dòng)性能的差異并不明顯。可以認(rèn)為受電弓與接觸網(wǎng)橫向相對(duì)運(yùn)動(dòng)對(duì)弓網(wǎng)垂向動(dòng)力學(xué)性能的影響可不予考慮;從計(jì)算精度和計(jì)算效率兩方面統(tǒng)籌考慮,對(duì)弓網(wǎng)垂向動(dòng)力學(xué)性能仿真時(shí),采用二維弓網(wǎng)動(dòng)力學(xué)模型較為合適。
2.4 風(fēng)載條件下的弓網(wǎng)動(dòng)力學(xué)
橫風(fēng)條件下弓網(wǎng)受流的安全性和可靠性也是弓網(wǎng)動(dòng)力學(xué)研究的重要內(nèi)容,然而,二維弓網(wǎng)動(dòng)力學(xué)模型難以分析接觸網(wǎng)的橫向運(yùn)動(dòng)行為,在進(jìn)行接觸網(wǎng)風(fēng)振以及橫風(fēng)載荷條件下的弓網(wǎng)動(dòng)力學(xué)仿真時(shí),必須采用三維弓網(wǎng)動(dòng)力學(xué)模型。文獻(xiàn)[8]指出,橫向自然風(fēng)作用于接觸網(wǎng)時(shí),接觸線不僅產(chǎn)生橫向位移同時(shí)產(chǎn)生了垂向位移,因此,列車在橫風(fēng)中運(yùn)行時(shí),必然導(dǎo)致弓網(wǎng)動(dòng)態(tài)性能變化。為此,基于AR模型建立了接觸網(wǎng)脈動(dòng)風(fēng)場(chǎng),當(dāng)平均風(fēng)速為20 m/s時(shí),橫向脈動(dòng)風(fēng)速時(shí)程,如圖10所示。
根據(jù)脈動(dòng)風(fēng)速獲得作用于接觸網(wǎng)上的脈動(dòng)風(fēng)載荷,然后進(jìn)行風(fēng)載荷條件下的弓網(wǎng)動(dòng)力學(xué)仿真,并與無(wú)風(fēng)載荷時(shí)的接觸壓力進(jìn)行了比較,如圖11所示。由圖11可知,橫向脈動(dòng)風(fēng)載荷對(duì)弓網(wǎng)接觸壓力具有重要影響,使得接觸壓力的波動(dòng)變大。對(duì)接觸壓力進(jìn)行統(tǒng)計(jì)分析,橫風(fēng)載荷作用時(shí),弓網(wǎng)接觸力的平均值、標(biāo)準(zhǔn)差、最大值和最小值分別為159.41,46.60,307.70和42.15 N;相對(duì)于無(wú)橫風(fēng)載荷作用時(shí),平均值、標(biāo)準(zhǔn)差和最大值分別增加了1.12,16.64和44.65 N,最小值減小了39.60 N。對(duì)接觸壓力進(jìn)行頻譜分析,如圖12所示,由圖12可知,風(fēng)載荷條件下對(duì)弓網(wǎng)接觸力的低頻成分具有較大影響,在0~3 Hz范圍內(nèi)幅值增大較為明顯,因此,接觸網(wǎng)風(fēng)載荷是弓網(wǎng)動(dòng)力學(xué)分析中不可忽略的因素。
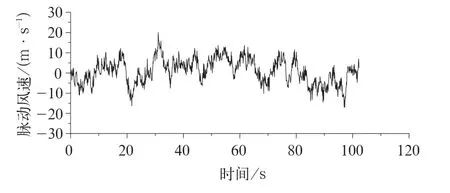
圖10 橫向脈動(dòng)風(fēng)速時(shí)程(20m/s)
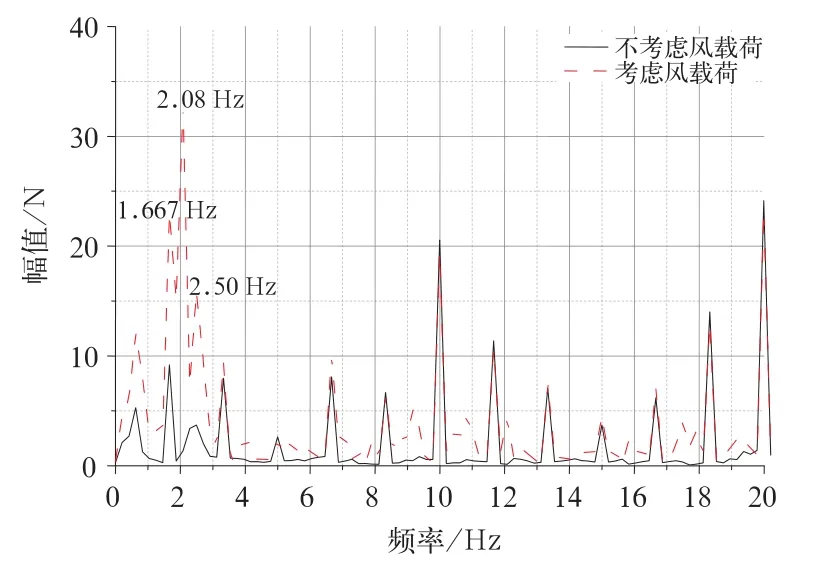
圖11 接觸壓力(300 km/h)
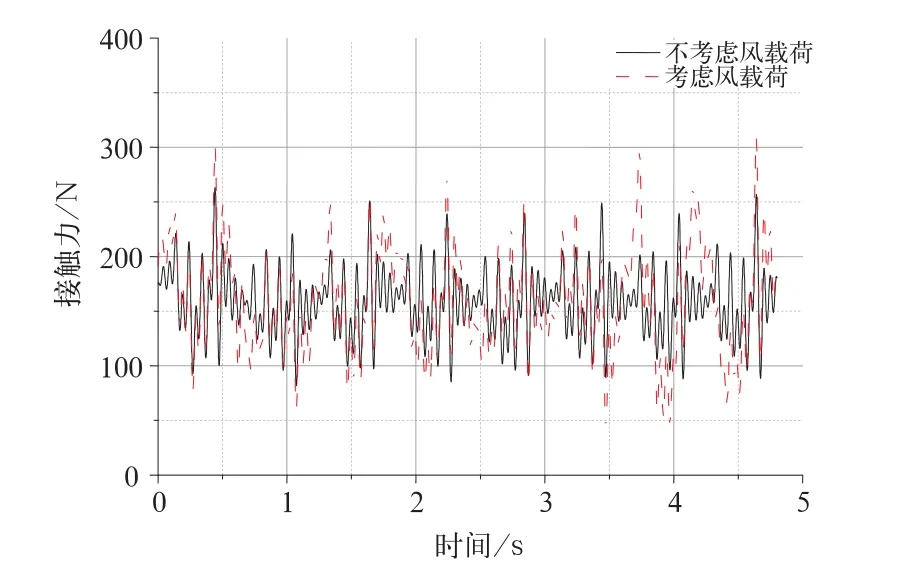
圖12 接觸壓力頻譜
3 結(jié)束語(yǔ)
(1)由于三維接觸網(wǎng)模型存在橫向振動(dòng)行為,同一垂向模態(tài)振型對(duì)應(yīng)的頻率略低于二維接觸網(wǎng)模型的計(jì)算結(jié)果,但二維和三維接觸網(wǎng)模型的垂向振動(dòng)特征基本一致。
(2)進(jìn)行弓網(wǎng)耦合動(dòng)力學(xué)仿真時(shí),二維和三維弓網(wǎng)動(dòng)力學(xué)模型計(jì)算得到弓網(wǎng)接觸壓力、接觸線抬升位移和弓頭振動(dòng)加速度基本一致,因此,從計(jì)算精度和效率考慮,可采用二維模型進(jìn)行弓網(wǎng)垂向動(dòng)力學(xué)仿真。
(3)弓網(wǎng)系統(tǒng)存在橫風(fēng)作用時(shí),需采用三維弓網(wǎng)動(dòng)力學(xué)模型分析,橫向脈動(dòng)風(fēng)載荷對(duì)弓網(wǎng)接觸壓力具有重要影響,使得接觸壓力的波動(dòng)變大,從而導(dǎo)致弓網(wǎng)受流質(zhì)量變差。
[1] B.SIMEON,M.ARNOLD.Coupling DAEs and PDEs for Simulating the Interaction of Pantograph and Catenary[J].Mathematical and Computer Modelling of Dynamical Systems,2000,6(2):129-144.
[2] M.Arnold,B.Simeon.Pantograph and catenary dynamics:A benchmark problem and its numerical solution[J].Applied Numerical Mathematics 2000,(34):345-362.
[3] W H Zhang,G M Mei,X J Wu.Hybrid simulation of dynamics for the pantograph-catenary system[J].Vehicle System Dynamics,2002,38(6):393-414.
[4] W H Zhang,G M Mei,X J Wu,and L Q Chen.A study on dynamic behavior of pantographs by using hybrid simulation method[J].Rail and Rapid Transit,2005,219(3):189-199.
[5] Collina A and Bruni S.Numerical Simulation of Pantograph-Overhead Equipment Interaction[J].Vehcile System Dynamics,2002,38(4):261-291.
[6] Collina A,Conte A L,Camevale,M.Effect of collectordeformable modes in pantograph-catenary dynamic interaction[J].Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit,223(1):1-14.
[7] Ning ZHOU,Wei-hua ZHANG,Rui-Ping LI,Dynamic performance of a pantograph-catenary system with the consideration of the apperance characteristics of contact surfaces[J].Zhejiang Univ-Sci A(ApplPhys&Eng),2011,12(12):913-920.
[8] 李瑞平,周寧,張衛(wèi)華,梅桂明.基于AR模型的接觸網(wǎng)脈動(dòng)風(fēng)場(chǎng)與風(fēng)振響應(yīng)[J],交通運(yùn)輸工程學(xué)報(bào),2013,13(4):56-62.
Analysis of the Applicability of 2D and 3D Pantograph-Catenary Coupled Dynamical Model
WANG Shixuan,LYU Qingsong,LI Ruiping,ZHOU Ning,MEI Guiming,ZHANG Weihua
(Traction Power State Key Laboratory of Southwest Jiaotong University,Chengdu 610031 Sichuan,China)
Based on the modal characteristics of catenary,the dynamic contact forces,the uplift displacements of contact wire,the acceleration of collector head and the dynamic spectral characteristics,the differences between the 2D and the 3D pantograph-catenary coupled dynamical model for pantograph-catenary interaction were discussed.Moreover,the 3D model was applied to study the influence of wind-induced vibration of the catenary on the contact forces between the collector strips and the contact wire while the catenary was subjected to the action of crosswind.The research indicates that there is good agreement between the simulation results obtained by the 2D model and that by the 3D model,and the effect of the lateral relative movement of the pantograph and catenary on the vertical dynamical behavior of the current collection system can be ignored.The 3D model can be used to analyze the responses of the pantograph and catenary system in crosswind condition.The crosswind loads have great effect on the contact forces and make the quality of current collection get worse.
catenary;pantograph;coupled dynamical model;applicability;frequency spectrum;crosswind loads
U228.2+6
A
10.3969/j.issn.1008-7842.2014.03.33
1008-7842(2014)03-0130-06
*國(guó)家973計(jì)劃項(xiàng)目(2011CB711105);"十一五"國(guó)家科技支撐計(jì)劃(2009BAG12A01);國(guó)家自然科學(xué)基金項(xiàng)目(51075341)
9—)男,碩士生(
2013-10-18)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44