基于接收信號強度的不同移動終端定位方法研究
2014-03-25 06:12:14張維李文濤王力
西北工業大學學報 2014年3期
張維, 李文濤, 王力
(西北工業大學 現代設計與集成制造技術教育部重點實驗室, 陜西 西安 710072)
自美國E-911定位需求頒布以來,德國、法國、瑞典、芬蘭、日本等各國也紛紛推出了對移動位置服務的規定。這使得基于位置的服務(location-based services, LBS)滲透到各行各業乃至人們的日常生活之中,即在無線網絡中,用戶利用無線移動終端協助確定其實際位置信息,從而獲取所需要的與位置相關的服務。
位置指紋(location fingerprinting, LF)方法適合于室內等空間有限的定位環境,其思想是離線階段測量廣泛使用的室內無線局域網中由無線接入點(access point, AP)發出隨時可用的接收信號強度(receive signal strength, RSS),利用RSS與對應已知位置的關聯性來構建數據庫,這些先驗數據在應用時可以用來與獲取的定位請求信號的RSS比較,通過模式匹配算法得到目標的位置信息。這種方法包含了環境信息,可以大大地提高室內定位精度;不但不需要用數學方法精確描述RSS與距離之間的關系,更不需要預先知道WLAN中APs的具體位置,普適性更強。但是它的最大局限性在于因構建和更新數據庫需要花費的大量人力和物力,而不同設備生成的LF地圖差異明顯[1-2]。
目前解決該類問題的方法分為2類:①不用校正的穩健指紋方法;②需要線上調整RSS到采集設備信號強度的度量方法[3]。文獻[4]中使用所有不同AP對采集的RSS比值作為指紋,由于摒棄掉了大量的原始數據信息,當待定位設備與采集設備一致時,定位性能不及傳統的RSS指紋定位法。文獻[5]中提出了不同設備之間的RSS模式存在線性關系,可以通過轉換模式達到提高定位精度的目的。但是要對所有類型的接收設備都人工做一張對應的LF地圖是不可能,即使種類有限,工作量也是巨大的。
本文提出了接收信號強度差值法(RSSD)和實時自適應學習規范化法(RSALS),分別用于定位APs一致和不一致的情況,可以在不用更新LF地圖的前提下,滿足定位多種不同設備的需求,而且會一定程度上提高定位精度。
1 算法描述
將定位場景劃分為N個子區域,本算法規定采集參考點(calibration point, CP)為子區域的中心點。由于不知道待定位終端的位置的先驗知識,所以我們允許CP并非嚴格意義上子區域中心。假設定位區域中有M個APs,雖然APs的絕對和相對位置未知,但我們很容易利用每個AP特有的MAC地址,將在CPs處多次測量的RSS生成對應已知子區域的LF地圖。
1.1 接收信號強度差值RSSD方法
RSS值與采集設備硬件有關,導致與硬件相關的參數變化,比如天線增益等。換句話說,針對不同設備在同一位置接收到的RSS平均值與硬件有關。RSS均值可以通過下式計算:
E(Pr)=E(Pt-Pl)
(1)
式中:Pr是移動終端接收能量;Pt是AP的發生能量,我們可以根據情況自行設置;Pl是信號傳輸路徑損耗,我們使用對數路徑損耗模型,CPi處測得APj的RSS均值可以用平均路徑損耗公式計算:
Pl(dij)|dBm=Pl(d0)|dBm+10αlog(dij)+Χσ|dB
(2)
式中:CPi與APj的距離用dij表示,Pl(dij)表示自由空間信號傳輸dij時的損耗;Pl(d0)是在任意參考距離d0時自由空間的信號傳輸損耗,通常取d0=1 m;變量α表示該信號傳播路徑損耗指數;Χσ是均值為0,標準差為σ的高斯隨機變量,用來表示信號陰影衰減。
下面我們討論發射信號的AP設備全部一致的情況,討論不同接收終端定位問題。假設待定位目標距離AP1和AP2的距離分別是d1和d2,將公式(1)帶入公式(2)得:
Pr(d1)|dBm=Pr(d0)|dBm-10α1log(d1)+Χ1|dB
(3)
Pr(d2)|dBm=Pr(d0)|dBm-10α2log(d2)+Χ2|dB
(4)
如果我們假設特定臨近室內環境的損耗指數是相同的,即α1=α2=α,將公式(3)與公式(4)相減抵消接收設備差異引入的P(d0)得到:
我們用RSSD代替RSS作為LF,則對應的LF地圖中CPi有如下形式:


隨著APs數量的增加,訓練數據的樣本容量隨之指數增長。我們假設APs間工作相互獨立,即來自不同APs的RSS也相互獨立,聯合分布可以用邊緣概率分布改寫:
1.2 實時自適應學習規范化RSALS法
實際定位中會利用實際場景中的很多不同的AP,在AP不相同的情況下上述的RSSD方法性能會大打折扣。所以我們推廣到更為普遍的情況,接收設備和發射設備全不相同的情況。我們用Dc表示采集設備,而待定位設備用Do表示,它們對應的LF數據庫分別用Rc和So表示,則P(Rc|l,Dc)表示訓練設備Dc在位置l時LF為Rc的條件概率,對應的待定位設備的條件概率是P(So|l,Do)。問題轉化為找到一個準確的變換方程F,對于任意的位置li可以對So使用變換F后使得概率P(So|l,Do)約等于概率P(Rc|l,Dc),即P(Rc)=P(F(So))。
從學習的角度來講,有監督地采集訓練樣本的人力成本太大。而且如果定位設備較多,特別是開放式定位系統中所有進入定位場景的終端都可以實現定位,則不可能將所有可能待定位的設備都與訓練設備建立變換方程。所以我們需要無監督式的學習算法。
文獻[5-6]中都指出了不同設備的RSS基本屬于線性關系,所以我們也使用線性回歸算法,并假設待定位設備的RSS地圖與訓練設備地圖間的回歸模型是線性關系:Rc=b+a×(So)+ε,其中(a,b)表示轉換方程的系數,ε是誤差項。我們需要提前確定待定位設備的初始位置,利用該初始位置的Rc與So的數據,使用最小二乘法確定系數(a,b),之后將待定位終端的RSS變換到線下采集設備的LF地圖度量中,使用最大似然估計方法計算位置估計。
下面說明初期確立與So對應的Rc的方法,我們采用皮爾森系數法,如下:
式中:j是AP的序號,|Ni|是在位置CPi可檢測到AP數量,ri,j是訓練設備在CPi的LF,μ(·)是一個隨意變量的均值或者期望,si,j是待定位設備的LF。皮爾森相關系數Ri的絕對值在(0,1)之間,其中1代表最佳線性相關性,或者說2個指紋向量具有最大相似性。所以我們可以用皮爾森相關系數測量訓練設備和待定位設備的RSS指紋相似性。選出訓練設備指紋地圖中與實時測量設備測得RSS相關性最高的位置作為定位初始位置。
2 實驗與對比
2.1 實驗平臺搭建
本文的定位實驗平臺運行在某建筑11層搭建的一個IEEE 802.11b/g/n無線局域網上,所有AP配備的是802.11b/g/n 協議的 2.4 GHz無線網卡,設定發射功率為17 dBm,增益5 dBi,天線高度15 mm左右,全向天線。整個定位系統原型在Microsoft Visual Studio 2010環境下開發,數據庫使用MySQL。待定位終端為4臺不同品牌的筆記本,分別為Lenovo G430、ASUS X50、HP 6930p、BenQ S41。待定位區域為整個11層,采集點在西邊走廊和B1120、B1122、B1125室,如圖1所示。定位系統安裝在客戶端,首先由用戶向應用程序提出請求,定位系統獲得請求以后,向無線網卡發出指令,啟動采集來自各AP的RSS程序。接著,定位算法利用位置指紋數據庫和實時收到的RSS估計用戶的位置,并返回定位結果。

圖1 無線定位實驗平臺區域覆蓋圖
2.2 實驗結果分析
2.2.1 RSALS法基準設備地圖建立
實驗中我們盡量減小環境和時間上對結果的影響,單純地關注不同設備對于RSS的影響,測試的設備高度保持穩定。
測試點距離AP2的距離分別是0.3~40 m,每個參考點測試時間為360 s,對采集的真實RSS和對數距離使用MATLAB做線性擬合。如圖2所示,可以很明顯發現,不同設備同一位置的RSS值差別明顯,最大的差別可達到30 dB。由于不同設備在同一參考點上的實驗是在不同時間進行的,這必然引入了時間變化對結果的影響,但是它們不能完全解釋這么大的差別。我們可以得出結論,Lenovo G430和ASUS X50采集的RSS變化梯度很小,這些設備不適合WLAN的指紋定位技術,它們很難區分臨近的位置點。
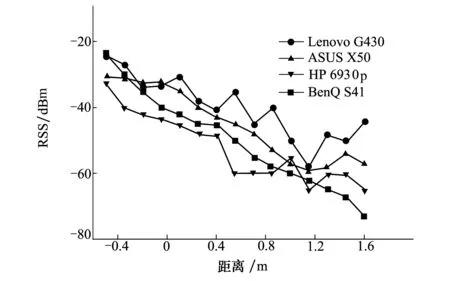
圖2 不同設備RSS變化梯度對比
上面用以描述RSS空間變異特性,下面我們用RSS時間變異特性來衡量不同設備用于室內定位的優先順序。

表1 不同設備的標準差
不同設備在同一位置不同時間采集的RSS標準差越低,則定位精度越高。我們可用如下原因解釋:當用戶詢問其位置的時候,設備采集RSS標準差越低,表明實時掃描結果與存儲在數據庫中結果相似概率越高。
綜合上面兩方面,本實驗選擇BenQ S41作為基準設備用以線下采集RSS生成數據庫。
2.2.2 設備不一致時RSSD法、RSALS法和傳統LF概率法比較
1) AP相同情況
使用BenQ S41作為訓練設備,在AP相同的前提下比較RSSD法、RSALS法與Horus定位系統的LF概率法定位ASUS X50的結果,從圖3中的實驗結果可以看出,RSSD法與RSALS法的定位效果幾乎無差別,都明顯好于傳統的Horus[7]系統定位性能;但是由于RSSD方法不需要線上擬合線性回歸模型,所以處理時間上比RSALS有優勢。
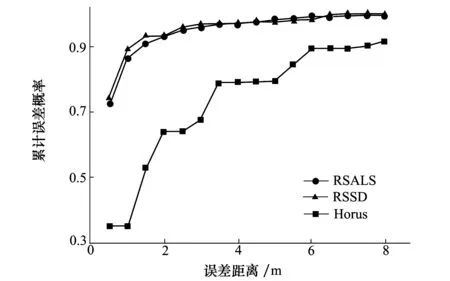
圖3 AP相同設備不同時各定位算法對比
2) AP不相同情況
針對AP不同的情況,訓練設備使用BenQ S41,待定位設備使用ASUS X50。如圖4所示,在AP不相同的情況下,RSALS法性能十分明顯好于RSSD,可以做到誤差在1.5 m之內的概率超過90%。

圖4 AP不同設備不同時各定位算法對比
2.2.3 設備一致時RSALS法與傳統LF概率法比較
下面的實驗使用不同的AP組合,我們研究對于訓練設備和待定位設備都是BenQ S41的情況下各個方法的定位性能,驗證設備一致時使用RSALS法是否必要。
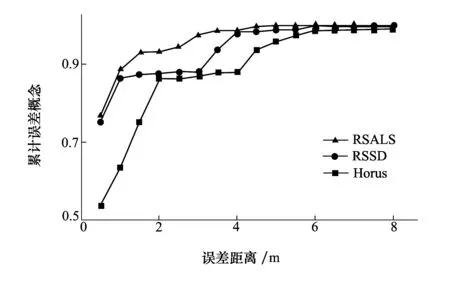
圖5 AP不同設備相同時各定位算法對比
通過對比各方法定位精度結果,如圖5所示,使用RSALS法和RSSD法定位精度仍然高于傳統的Horus[7]方法。這種結果的原因可能是由于我們的訓練數據庫的環境與實時待定位時的室內環境不完全相同,RSALS法可以抵消部分室內動態變化的問題。而對于RSSD方法,無論線下采集還是實時定位階段,所有AP受到室內環境的影響有一定的相關性,使用RSSD作為LF比RSS會更加穩健。
3 結 論
本文對基于位置指紋的不同移動終端定位方法做了較為全面的研究,所提出的RSSD和RSALS方法,有效解決了不同WLAN移動終端獲取接收信號強度存在差異的問題,并在真實室內WLAN環境下驗證了算法的可行性和有效性。本文的實驗環境范圍較小,但是針對定位場景較大時檢索LF地圖中的所有參考點,算法實時性會受到嚴重影響,并對待定位目標的能耗提出了更高的要求。
參考文獻:
[1] Park J, Curtis D, Teller S, et al. Implications of Device Diversity for Organic Localization[C]∥INFOCOM, Proceedings IEEE, 2011: 3182-3190
[2] Lui G, Gallagher T, Li B, et al. Differences in RSSI Readings Made by Different Wi-Fi Chipsets: A Limitation of WLAN Localization[C]∥Localization and GNSS, International Conference IEEE, 2011: 53-57
[3] Fang S H, Wang C H, Chiou S M, et al. Calibration-Free Approaches for Robust Wi-Fi Positioning against Device Diversity: A Performance Comparison[C]∥Vehicular Technology Conference IEEE 75th, 2012: 1-5
[4] Kjargaard M B, Munk C V. Hyperbolic Location Fingerprinting: A Calibration-Free Solution for Handling Differences in Signal Strength[C]∥Pervasive Computing and Communications, 2008: 110-116
[5] Haeberlen A, Flannery E, Ladd A M, et al. Practical Robust Localization over Large-Scale 802.11 Wireless Networks[C]∥Proceedings of the 10th Annual International Conference on Mobile Computing and Networking, Philadelphia, 2004: 70-84
[6] Tsui A W, Chuang Y H, Chu H H. Unsupervised Learning for Solving RSS Hardware Variance Problem in WiFi Localization[J]. Mobile Networks and Applications, 2009, 14(5): 677-691
[7] Youssef M, Agrawala A. The Horus Location Determination System[J]. Wireless Networks, 2008, 14: 357-374
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
電子制作(2018年11期)2018-08-04 03:26:08
財經(2017年2期)2017-03-10 14:35:35
財經(2016年15期)2016-06-03 07:38:02
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
財經(2016年3期)2016-03-07 07:44:46
財經(2016年6期)2016-02-24 07:41:51
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56