多徑干擾下GPS弱信號跟蹤算法研究
2014-03-27 03:24:30范勝林劉建業(yè)
云南民族大學(xué)學(xué)報(自然科學(xué)版) 2014年5期
關(guān)鍵詞:信號
衛(wèi) 潔,范勝林,周 超,劉建業(yè)
(南京航空航天大學(xué) 導(dǎo)航研究中心,江蘇 南京 210016)
隨著GPS的運用越來越廣泛,其適用范圍已經(jīng)到了一些復(fù)雜環(huán)境中,例如山地、森林或是一些大都市.在北京、上海、香港這些地區(qū),高樓大廈鱗次櫛比,綠化帶隨處可見,遮擋物也比比皆是.在這類環(huán)境下,GPS的信號發(fā)生嚴重衰減,伴隨而來的,是多徑等其他一系列問題.而事實上,目前民用的GPS傳統(tǒng)接收機在信號的載噪比下降到35dB的時候性能就會變得很差甚至完全失效,這就極大地限制了GPS接收機的應(yīng)用范圍[1],所以研究GPS接收機在具有嚴重多徑干擾下的性能提升是非常有必要的.
1 多徑誤差分析
在信號的跟蹤階段,首先利用本地產(chǎn)生的一個復(fù)現(xiàn)載波與輸入信號相乘,從而剝離載波,然后再與本地產(chǎn)生的復(fù)現(xiàn)碼進行相乘,進而實現(xiàn)偽碼剝離[2].而多徑信號的存在,對于載波環(huán)路和碼環(huán)路都存在影響,對碼環(huán)跟蹤的影響遠大于載波跟蹤的影響[3],因此考慮在碼環(huán)中進行多徑抑制.碼環(huán)采用延遲鎖定環(huán)(DLL)進行信號跟蹤,其結(jié)構(gòu)如圖1所示.
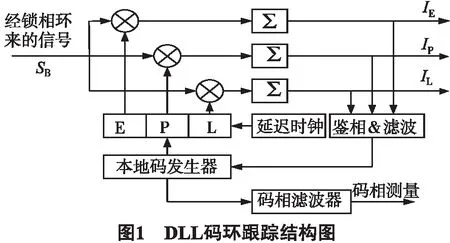
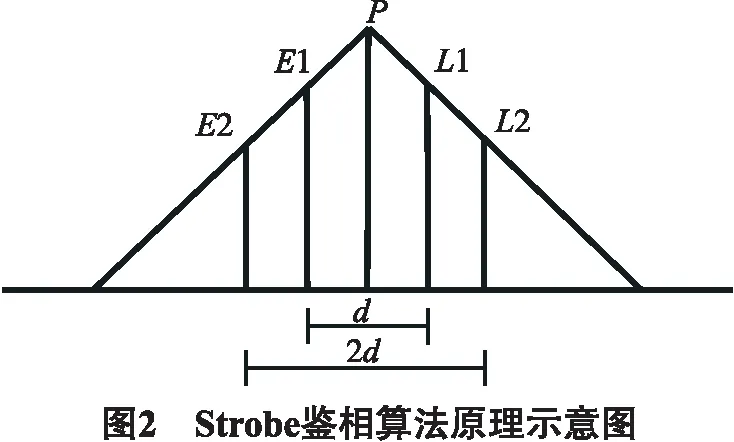
由圖1可知,本地發(fā)生器會產(chǎn)生3種碼:即時碼P;超前碼E;滯后碼L.其中,早遲碼的間距為d,超前碼(E)比即時碼(P)超前d/2的間隔,滯后碼(L)比即時碼(P)落后d/2的間隔.E、P、L碼同時被送入相關(guān)器,并且與SB做相關(guān)累加運算,得到IE,IP,IL,再進入碼環(huán)鑒相器進行鑒相跟蹤.Strobe鑒相器算法如圖2所示.
傳統(tǒng)早遲碼(EML)鑒相算法和Strobe鑒相算法如式(1)所示[4-5].
DEML=Narrow(d)=E1-L1×DStrobe=2Narrow(d)-Narrow(2d)=2(E1-L1)-(E2-L2).
(1)
式中,Narrow用來表征窄相關(guān)的鑒相函數(shù),E1、L1、E2、L2分別為間距為d和2d的早碼相關(guān)值和遲碼相關(guān)值.
對EML算法和Strobe算法進行誤差輸出分析,得到誤差包絡(luò)示意圖如圖3.
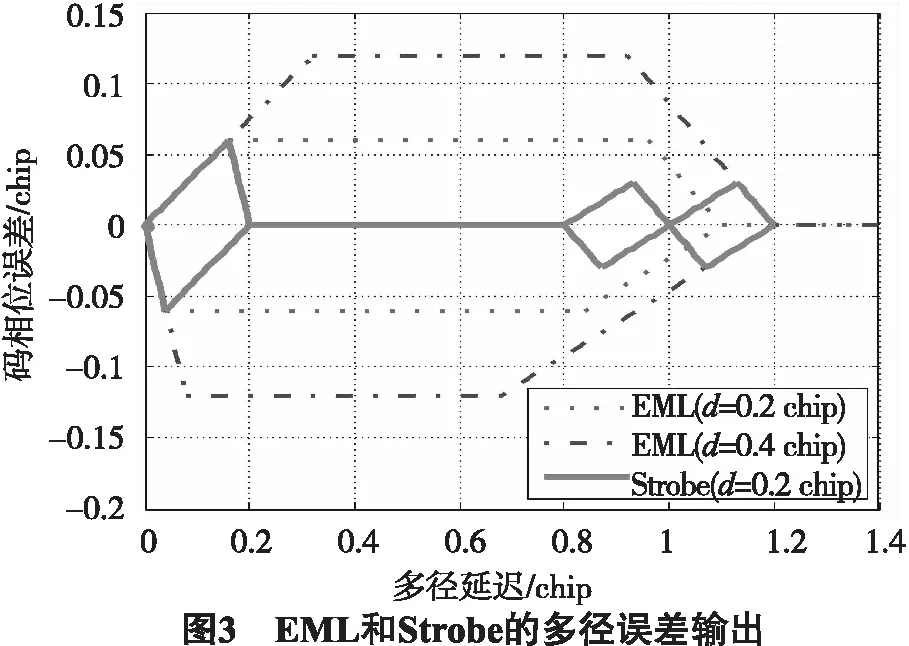
由圖3可知,Strobe算法相較于傳統(tǒng)EML算法有了很大的改善,特別是在原來多徑誤差最大的時候得到了結(jié)果為0的誤差輸出.相同d值時的最大誤差是相同的,不同的d值在包絡(luò)的起始處和結(jié)束處都是重疊的.
2 σ-Strobe鑒相算法
2.1 修正因子的確定
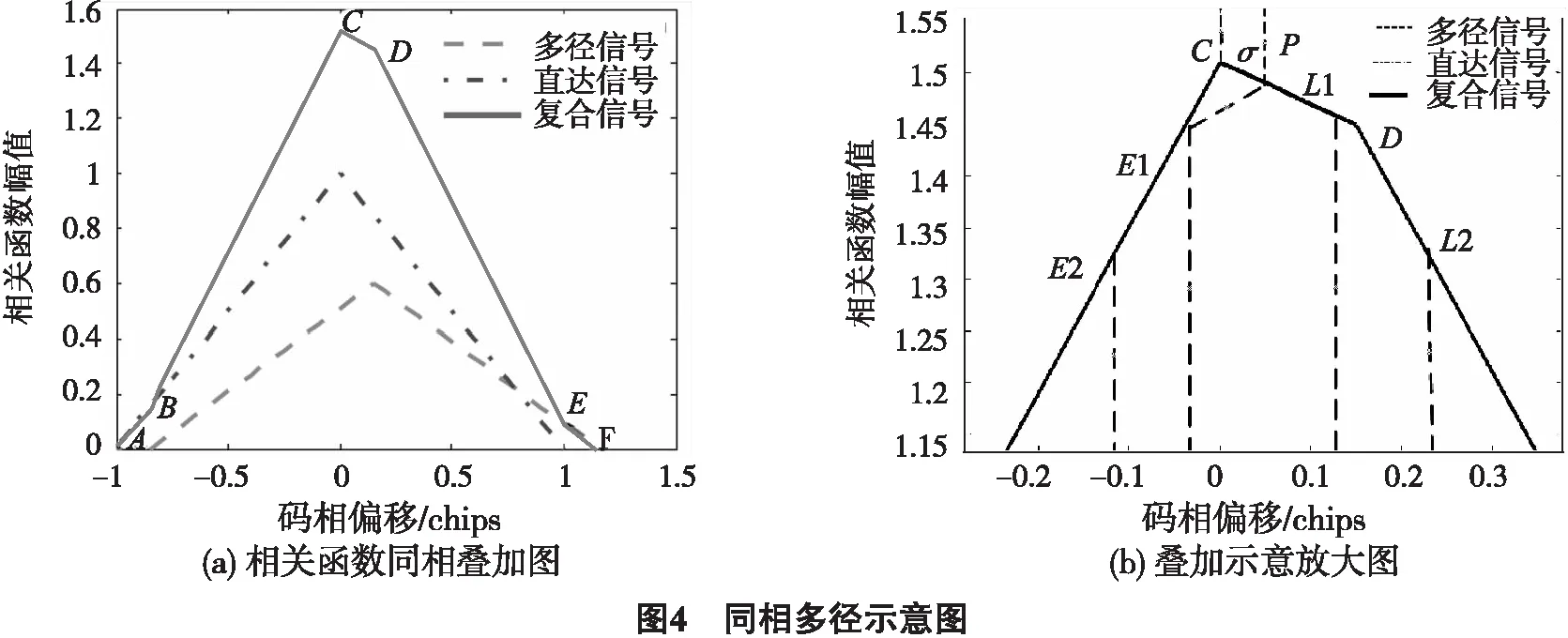
在進行多徑分類的時候,相關(guān)間距為d時,通常將多徑延遲小于d的信號叫做短多徑信號.在傳統(tǒng)的鑒相器中,由于沒有用到P的相關(guān)值,在進行改進的過程中,考慮結(jié)合相關(guān)函數(shù)的形態(tài),分析其內(nèi)部多徑信息,利用P值,增加一個修正因子σ,取為P與實際峰值之間的誤差,將誤差加入鑒相器進行修正,從而增強鑒相器對短多徑的抑制[6-7].對疊加后的相關(guān)函數(shù)進行研究和分析,在同相多徑的情況下,考慮2種情況,即P和L1在同一條直線的情況,以及L1和L2在同一條直線的情況,分別進行σ的求解;在反相多徑情況下,依舊考慮2種情況,即P和E1、E2都在同一條直線上,L1和L2不在同一條直線上,以及L1和L2在同一條直線上.同相多徑的示意圖如圖4(a)所示,圖4(b)為即P和L1在同一條直線的情況的放大示意圖.將P,E1,E2,L1,L2表達如下:
P=-a(σ-1)+b(σ+1-Δτm)=(-a+b)σ+a+(1-Δτm)b;
(2)
E2=(a+b)(σ-d)+a+(1-Δτm)b,L2=-(a+b)(σ+d)+a+(1+Δτm)b.
式中,假設(shè)a,b分別表示直達信號與多徑信號的斜率,Δτm為多徑誤差延時.經(jīng)過線性組合,可以得到σ的表達式為:
(3)
由式(3)可知,可將Strobe鑒相器修正為:
(4)
下面,再來確定臨界點D所對應(yīng)的Δτm值.由x=Δτm(圖4中CD段),x=Δτm-0.2(圖4中DE段),能夠得到:
(5)
由式(5)可知,在同相多徑下,σ的應(yīng)用范圍大小取決于短多徑幅值相對直達信號的幅值衰減,并且短多徑幅值衰減得越厲害,σ的應(yīng)用范圍就越大.
2.2 σ-Strobe應(yīng)用范圍確定
用與2.1節(jié)中類似的方法分析另外3種情況可知,都不能使用新的鑒相器進行鑒相.同相多徑的第2種情況下,將P,E1,E2,L1的表達式代入第1種情況下的修正因子σ,得到:
(6)
因此,在此情況下是不能夠進行誤差修正的.所以這種情況下只能使用原有的鑒相器算法進行碼相位鑒相.如果屬于這種情況,可以發(fā)現(xiàn)此時,E1-L2=L1-L2.因此,可以將它作為這種情況下,鑒相器選擇的判別標準.
反相多徑的時候,不管是第1種情況,還是第2種情況,將P,E1,E2,L1的表達式代入同相多徑第1種情況下的修正因子σ,可以得到:
(7)
因此,在反相的情況下,對于加入了修正因子的情況,可以不予理會.
3 EKF弱信號載波跟蹤環(huán)設(shè)計
3.1 基于相關(guān)值輸出的EKF載波跟蹤結(jié)構(gòu)

從改進后的碼環(huán)鑒別器的表達式,可以看出,鑒相的過程并沒有運用到Q路的輸出,這就對載波跟蹤的要求有所增高.而需要跟蹤的信號,又是帶有多徑干擾的弱信號,因此,不得不考慮噪聲對跟蹤產(chǎn)生的影響,因此,在這里考慮擴展卡爾曼濾波(EKF)算法,來進行載波環(huán)路的鑒相工作[8].使用EKF算法的時候,略去了原有跟蹤環(huán)路的鑒相器環(huán)節(jié),用EKF代替,其結(jié)構(gòu)圖如圖5所示.
3.2 基于相關(guān)值輸出的EKF載波跟蹤建模
由圖5可知,對EKF載波跟蹤系統(tǒng)進行建模的時候,將環(huán)路的相關(guān)積分輸出IP和QP作為系統(tǒng)觀測量,定義載波的狀態(tài)量為:
(8)
式中,Δθ為本地載波與真實載波的相位差;ω為輸入載波的頻率;a為輸入載波的頻率變化率.很明顯可以看出,觀測量和狀態(tài)量為非線性關(guān)系.
根據(jù)建模時所選的狀態(tài)量和觀測量進行分析,所建模型的態(tài)方程為
(9)
式中,ΔT為積分累計時間;Wn為高斯白噪聲序列,其方差Q由3部分組成[9-10],如下式:
(10)
因為IP和QP為觀測量,它們是環(huán)路積分值,進一步得到跟蹤模型的測量方程:
(11)
式中,A表示信號幅值;D(t)為導(dǎo)航數(shù)據(jù);R(Δτ)為C/A碼片自相關(guān)函數(shù);N為噪聲.
可以得到觀測矩陣:
(12)
(13)
經(jīng)過上面的建模過程,可以得到模型的狀態(tài)方程和測量方程,將它們代入到擴展卡爾曼濾波方程當中,可以得到需要估計的狀態(tài)量,進而進入到環(huán)路濾波的過程中去,改善了弱信號跟蹤的性能.將EKF與第2節(jié)的算法結(jié)合使用,形成新的σ-Strobe-EKF跟蹤算法.
4 仿真實驗與分析
4.1 EKF算法弱信號載波跟蹤環(huán)仿真
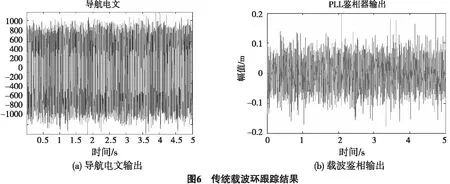
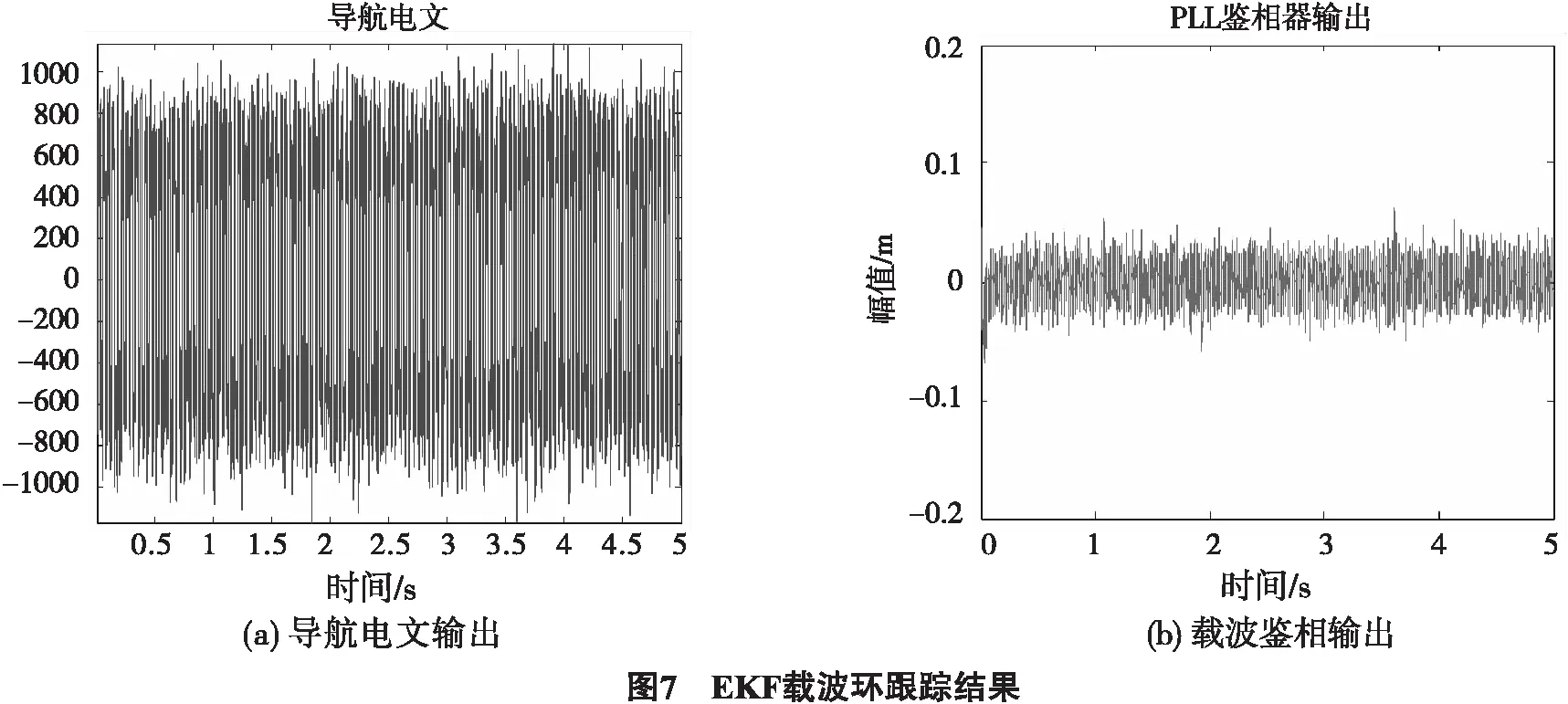
基于載噪比為38 dB的弱信號,分別針對原有的載波跟蹤環(huán)路和EKF載波跟蹤算法進行弱信號的跟蹤仿真,跟蹤總時間為5 s,跟蹤結(jié)果如圖6~7所示.圖6(a)和圖7(a)分別為2種算法解調(diào)得到的導(dǎo)航電文,說明跟蹤成功.圖6(b)和圖7(b)分別為2種算法的鑒相誤差輸出.對比圖6(b)和圖7(b)可知,EKF載波跟蹤環(huán)路對于弱信號的跟蹤有良好的跟蹤效果,比原始的二階濾波具有更平滑的鑒相誤差輸出.
4.2 σ-Strobe-EKF跟蹤算法仿真
基于44dB的弱信號,取早遲碼相關(guān)間隔d=0.2,加入延遲時間為0.18 chip(約為53 m)的多徑信號,信號幅值取直達信號幅值的0.5倍,跟蹤時間為5 s,分別對Strobe-EKF和σ-Strobe-EKF的跟蹤環(huán)路進行對比仿真,取跟蹤環(huán)路中的碼相誤差為衡量標準,仿真結(jié)果如圖8~9 所示.
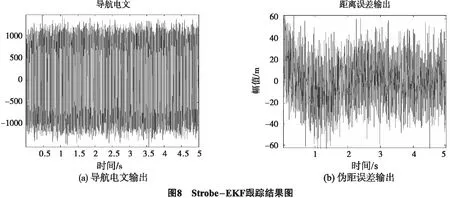
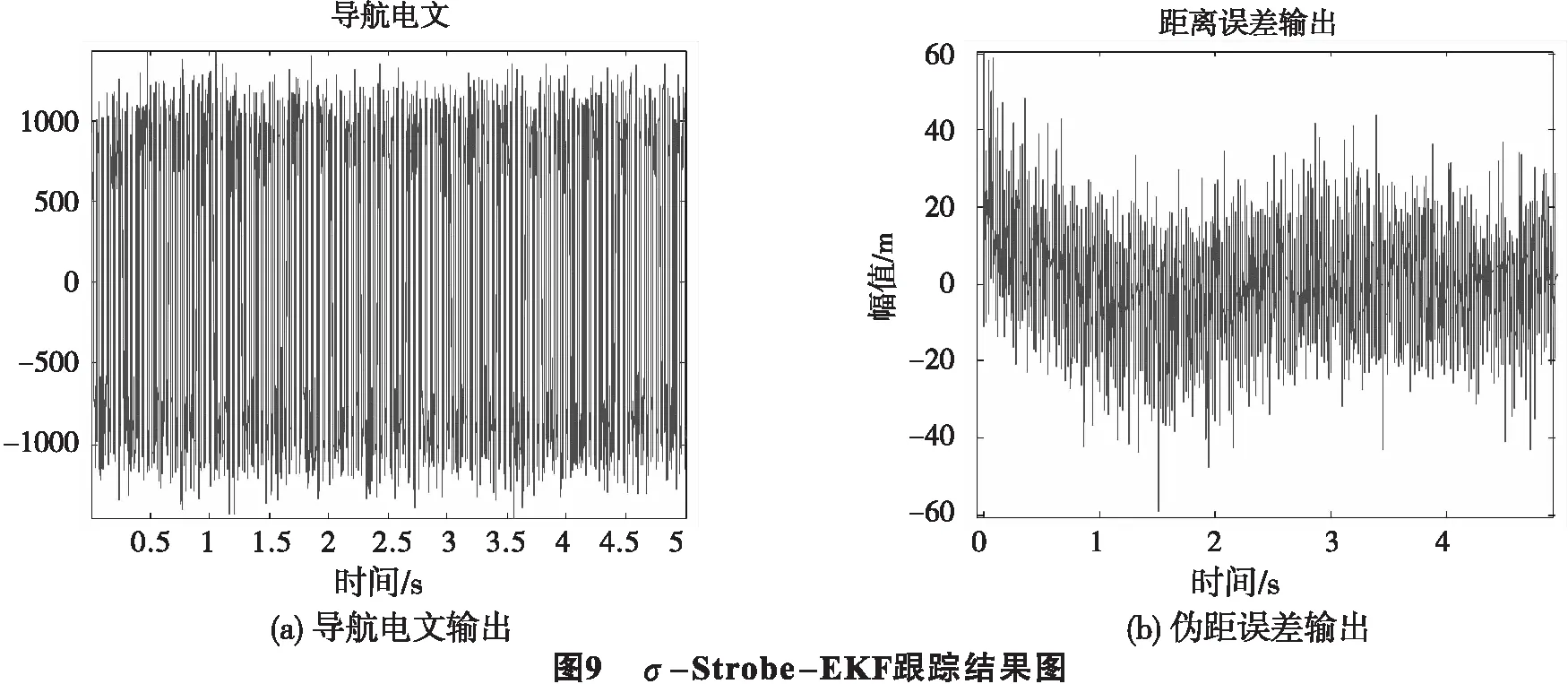
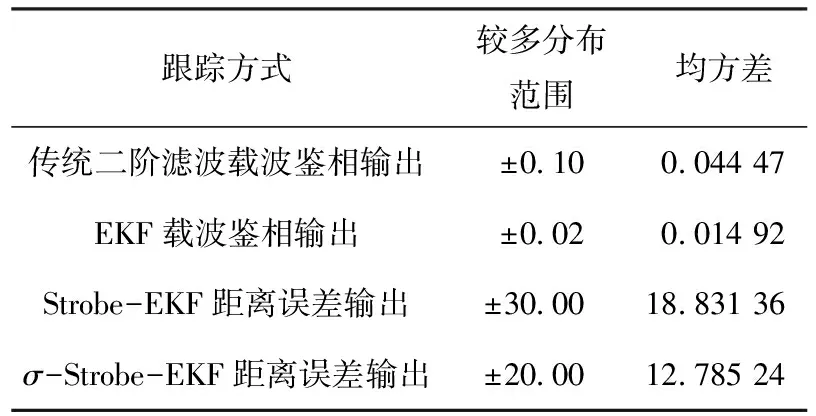
表1 不同跟蹤方式下載波和距離誤差輸出數(shù)值分析
由圖8(a)和圖9(a)可知,帶有多徑的弱信號信號被成功跟蹤.通過對比圖8(b)和圖9(b)中DLL鑒相誤差的距離輸出可知,在使用了σ-Strobe-EKF算法后,對短多徑的抑制性能有了顯著的改善.
為了更好的定性地體現(xiàn)跟蹤性能,列出表1,分析不同跟蹤方式下載波和碼環(huán)鑒相輸出數(shù)值.由均方差數(shù)值分析可知,在抑制短多徑上,使用了EKF后,載波跟蹤誤差有了明顯的改善.而在增加了修正因子的σ-Strobe-EKF算法后,碼環(huán)跟蹤誤差也得到了抑制,能夠有效地抑制多徑信號帶來的跟蹤誤差.
5 結(jié)語
從多路徑誤差對現(xiàn)代GPS系統(tǒng)的影響看,它已然成為了誤差的主要來源.本文以跟蹤環(huán)路為研究背景,分別在碼環(huán)Strobe鑒相器中加入修正因子,在載波環(huán)中用EKF替代了原有的二階濾波環(huán)路,將兩者結(jié)合起來成為σ-Strobe-EKF跟蹤算法,進行帶有多徑干擾的弱信號的跟蹤.仿真結(jié)果表明,改進后的跟蹤算法確實起到了作用,載波跟蹤性能和碼環(huán)跟蹤精度都有所提高,一定范圍內(nèi)的短多徑得到了抑制.
參考文獻:
[1] KAPLAN E D, HEGARTY C J.GPS原理與應(yīng)用[M].2版,寇艷紅,譯.北京:電子工業(yè)出版社, 2012.
[2] BORRE K, AKOS D.A software defined gps and galileo receiver: single-frequency approach[C]// ION GNSS.CA :Long Beach, 2005: 13-16.
[3] KAINDL K, NIKLASEH N.Improving path separation in a multipath environmentby applying norlinear estimation theory[C]//Proceedings of the institute of Navigation National Technical Meeting.US:Portland,2002:472-476.
[4] 紀元法, 施滸立,孫希延.一種Strobe相關(guān)器及其多徑抑制性能研究[J].宇航學(xué)報.2007, 28(5): 1094-1099.
[5] RAY J K, CANNON M E.Characterization of GPS carrier phase multipath[C]//Proceedings of the ION National Technical Meeting 1999.US: Salt Lake City, 1999: 132-141.
[6] ZHANG Z, LAW C L, WAN G E.Fine delay estimation technique under multipath[C]// ION GNSS.CA :Long Beach,.2004,9:1131-1137.
[7] 宋嘉吉.GPS接收機多徑抑制技術(shù)的研究與實現(xiàn)[D].南京:東南大學(xué), 2010.
[8] 梁前浩.GPS中頻信號仿真與微弱信號捕獲、跟蹤方法研究[D].北京:北京交通大學(xué), 2008.
[9] PSIAKI M L, JUNG H.Extended Kalman filter methods for tracking weak GPS signals[C]// Proceedings of ION GPS 2002.US:Portland, 2002,9: 24-27.
[10] LIAN P.Improving tracking performance of PLL in high dynamic applications[D].CA: Calgary University, 2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06