一種基于OpenGL的飛機部件定位系統仿真
2014-03-28 01:53:22唐文杰趙宇張邦民
電子設計工程 2014年8期
關鍵詞:飛機
唐文杰,趙宇,張邦民
(南京航空航天大學機電學院,江蘇南京210016)
隨著飛機裝配技術的發展,不斷提高裝配柔性化與自動化水平成為大型飛機制造的必然趨勢,而發展裝配機器人必將推進裝配柔性自動化的進程,促進飛機裝配技術革命性的變化,為我國的國民經濟帶來巨大的經濟效益和社會效益,為提升企業的國際競爭力發揮重大作用[1-3]。作為柔性裝配系統的一部分,如何獲得一種高精度、高剛度的定位系統對于我國飛機裝配技術的發展無疑是至關重要的。為進行此方面的探索,一種具有3個平移自由度的高剛度三自由度并聯機構Tripod[4]被用來搭建成一套飛機部件定位仿真系統。
1 開發環境Qt和OpenGL簡介
整個仿真系統是在集成開發環境Qt軟件下編寫的。Qt是一個跨平臺的C++圖形用戶界面應用程序框架。它提供的信號與槽機制能夠十分方便的搭建圖形用戶界面,它同Windows平臺上的MFC是同類型的東西。Qt自帶OpenGL庫,只需要重寫內置的關于OpenGL的虛函數就能夠方便的建立三維模型。OpenGL(全寫Open Graphics Library)是一個跨編程語言、跨平臺的編程接口,它用于三維圖象(二維的亦可)的顯示,是專業的圖形程序接口,是一個功能強大,調用方便的底層圖形庫。
2 四元數球面線性插補算法
由于飛機部件(中央翼盒、左中外翼、右中外翼等)一般是大體積大質量物體,在對其進行位姿調整過程中應十分注意運動的平穩性。否則不僅嚴重影響調整的精度,甚至會導致飛機部件外形的變形。而在歐拉空間中,線性插補是非均勻的,并不能滿足平穩性要求。為此,可以引入球面線性插補算法[5],將此算法運用于四元數,即所謂四元數球面線性插補算法。對飛機部件的轉動采用四元數球面線性插補可以使其繞某一定軸作勻角速度旋轉,意味著在此階段可以實現飛機部件零角加速度的旋轉,位姿調整的平穩性要求得到滿足。
2.1 四元數球面線性插補概述
先用首末矢量q0和q1(分別代表飛機部件的初始和目的姿態四元數)定義一個與q0垂直的單位矢量q′1,各矢量之間關系如圖1所示。

由圖1,導出插補量q(t)的表達式為

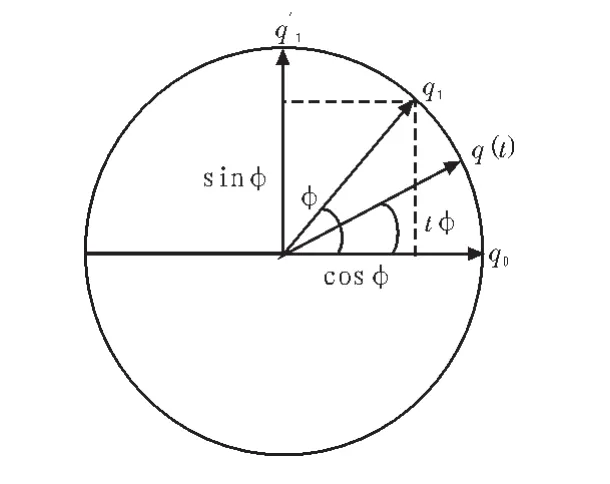
圖1 三矢量之間的關系Fig.1 Relationship among three vectors

q0與q1均相對于全局坐標系。現以q0表示的姿態為參考坐標系,則q0,q1此參考坐標系下的四元數表示為

式中cosφ=cos(θ/2),把式(3)代入至插補公式(2)中,可得:

由式(4)可知,四元數球面線性插補其實是繞固定軸轉動,當t從0到1均勻變化時,飛機部件從初始姿態q0繞固定軸n勻速旋轉θ后到達目的姿態q1。最后要將q(t)復原為全局坐標系,只需進行坐標變換:q0?q(t)即可。
2.2 四元數球面線性插補在程序中的實現
在OpenGL中物體的旋轉是采用歐拉角來實現,所以應先將飛機部件的歐拉角轉化為四元數形式,進行四元數球面線性插補,得到四元數形式的插補量,然后再轉化為歐拉角形式,以供OpenGL顯示飛機部件的姿態。具體流程如圖2所示。

圖2 四元數球面線性插補流程Fig.2 Quaternions spherical linear interpolation flow chart
3 仿真系統軟件設計
Tripod機構外形比較復雜,如圖3所示。機構中每組桿由主動桿和從動桿構成,從動桿跟隨主動桿運動。為方便建模分析,也因其在運動學上與3-UPU并聯機構的相似性,可將其簡化為3-UPU形式,如圖4。整個定位系統與飛機部件的連接方式采用多點陣真空吸盤式柔性工裝[6-7]。
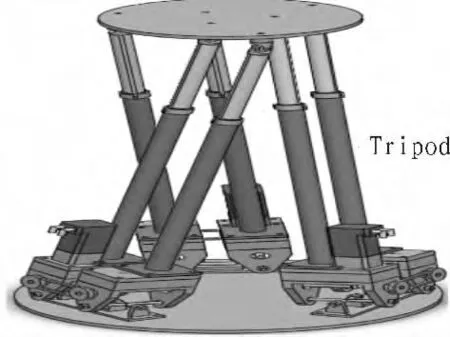
圖3 Tripod模型Fig.3 Tripod model
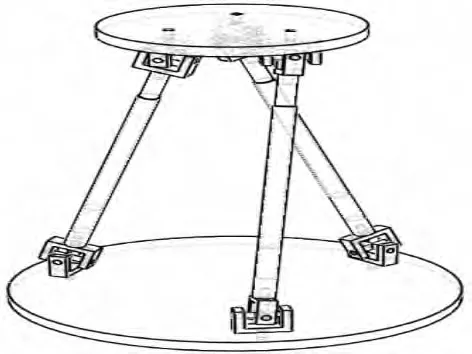
圖4 運動學等效后的TripodFig.4 Tripod after kinematic equivalence
由于OpenGL自身的建模能力十分有限,用OpenGL自帶的函數完成建模非常不方便,甚至無法完成。為解決此問題,先用三維軟件Pro/Engineer分別作出各個部件的三維零件圖,保存為OBJ文件格式。再編寫一個數據接口類來讀入并顯示OBJ文件,在程序中用各部件之間的幾何約束關系來規定各部件的運動方式,實現各部件的有序運動。飛機部件的運動方式是先轉動再平移。
3.1 軟件整體流程設計
軟件采用面向對象和模塊化的編程方式,便于修改和升級。具體流程如圖5所示。
3.2 軟件界面及仿真效果
軟件界面及仿真效果如圖6所示。飛機部件(為清楚顯示其下方的真空吸盤,飛機部件采用線框顯示)下方為3個Tripod(簡化為3-UPU形式)支撐,各Tripod與飛機部件采用真空吸盤連接。
3.3 軌跡分析
在一定范圍內任取起止歐拉角進行四元數球面線性插補,將此過程中飛機部件上一點的運動坐標導入Matlab中,得到其軌跡如圖7所示。此軌跡是一條光滑的空間曲線。
為驗證四元數插補點在同一平面上,假設插補點總數為N,按任意順序兩兩一組分成N/2組。每組兩個點坐標相減,得到N/2個向量。任取兩個向量求得法向量,然后求取此法向量與其它向量的夾角。按此思路編寫Matlab程序并運行得曲線如圖8。可見各向量與法向量夾角集中在90度附近,最大誤差不超過0.4%。考慮到浮點數據在Matlab運算過程中的舍入誤差,實際誤差會更小,因此可以認為所有插補點均在一個平面內。

圖5 軟件流程圖Fig.5 Software flow chart

圖6 軟件界面及仿真效果圖Fig.6 Software interface&simulation effect
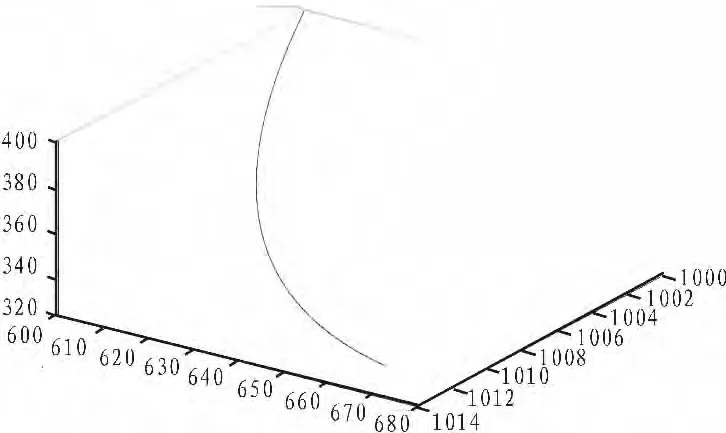
圖7 飛機部件上任意點軌跡Fig.7 Arbitrary point trajectory of aircraft component
在所有插補點均在同一平面的基礎上,為驗證所有插補點均在同一圓周,可以先由6個點通過方程組(5)得到圓心。

式中,(ai,bi,ci)為任意的插補點坐標,i=1,2,3,4,5,6,為圓心坐標。
然后求取各點到圓心的距離。按此思路編寫Matlab程序并運行得到曲線圖9。可見插補點到圓心的距離大約集中在[759.951,759.957]之間,波動幅度僅為0.006,同樣,考慮到誤差的影響此波動幅度應更小。由上所述,證明四元數插補達到了預期的效果。
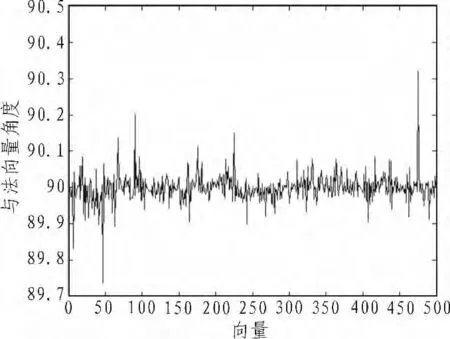
圖8 插補點向量與法向量夾角Fig.8 Angle between interpolation points and normal vector

圖9 插補點與圓心距離Fig.9 Distance between interpolation points and circle center
4 結論
仿真系統利用Qt和OpenGL成功的建立了一個仿真平臺,利用三自由度的Tripod搭建了一個定位系統,采用四元數球面線性插補算法來實現飛機部件姿態調整[8]時的平穩運動。著重分析和驗證了此插補算法的實現過程和插補效果。從最后的結果來看,達到了預期的仿真目的,為此方面的更深入研究和應用提供了依據。
[1] 鄒冀華,劉志存,范玉青.大型飛機部件數字化對接裝配技術研究[J].計算機集成制造系統,2007,13(7):1367-1373.ZOU Ji-hua,LIU Zhi-cun,FAN Yu-qing.Large-sizeairplane partsdigital assemblytechnology[J].Computer Integrated Manufacturing Systems,2007,13(7):1367-1373
[2] 鄒冀華,劉志存,范玉青.大型飛行器艙段數字化裝配方法[J].制造業自動化,2007,29(1):1-4,24 ZOU Ji-hua,LIU Zhi-cun,FAN Yu-qing.Digital assembly method for largeaerocraftsection[J].ManufacturingAutomation,2007,29(1):1-4,24.
[3] 郭恩明.國外飛機柔性裝配技術[J].航空制造技術,2005(9):28-32.GUO En-ming.Aircraft flexible assembly technology of foreign countries[J].Aeronautical Manufacturing Technology,2005(9):28-32.
[4] 洪超,吳洪濤.Tripod并聯定位器剛度分析及其在飛機裝配中的應用[J].應用科技,2011,38(6):58-61.HONG Chao,WU Hong-tao.Stiffness analysis of Tripod parallel positioned and applications in aircraft assembly[J].Applied Science and Technology,2011,38(6):58-61.
[5] Andrew J.Hanson.Visualizing Quaternions[M].Elsevier Inc,2006.
[6] 秦龍剛,陳允全,姚定.飛機裝配先進定位技術[J].航空制造技術,2009(14):55-57.QIN Long-gang,CHEN Yun-quan,YAO Ding.Advanced positioning technology for aircraft assembly[J].Aeronautical Manufacturing Technology,2009(14):55-57.
[7] 周凱.飛行器大型薄壁件制造的柔性工裝技術[J].航空制造技術,2012(3):34-39.ZHOU Kai.Flexible tooling and fixture technology of large thin-wall part manufacturing for aircraft[J].Aeronautical Manufacturing Technology,2012(3):34-39.
[8] 張偉,陳鋒,馬軍強,等.軌姿控發動機脈沖后效沖量快速算法的研究及應用[J].火箭推進,2012(1):51-56.ZHANG Wei,CHEN Feng,MA Jun-qiang,et al.Research and application of fast algorithm for pulse residual impulse of divert and attitude control engine[J].Journal of Rocket Propulsion,2012(1):51-56.
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33