基于無線通信的養路機械施工人員防碰撞技術研究
2014-03-29 07:38:54唐玉青李建勇
機電工程 2014年4期
唐玉青,李建勇,王 恒
(北京交通大學 機械與電子控制工程學院,北京 100044)
0 引 言
隨著我國鐵路里程的不斷增加,養路作業也逐漸進入了大型機械化時代[1]。由于大型養路機械的作業速度越來越快,在提高作業效率的同時也帶來了碰撞施工人員的風險。以配砟整形車為例,其作為常見的大型養路機械,在養路作業中占據著重要的位置。配砟整形車作業時,在側犁向外伸出的情況下同時向前運動,由于作業速度較快,可能會碰撞施工人員,從而引發較為嚴重的安全事故,對國家和人民的生命財產造成損失[2]。一般來說,在作業過程中,司機通過眼睛觀察周圍作業人員的分布情況并決定是否需要采取剎車、鳴笛等安全措施。然而事實上,由于疲勞駕駛、視線盲區等原因,司機往往難以完全掌握周圍施工人員的分布情況,這樣在作業時就會存在較大的安全隱患。因此,怎樣才能讓司機實時掌握周圍施工人員的位置狀態,從而避免碰撞事故的發生,是研究防碰撞技術時要解決的關鍵問題。
目前,對于局部區域的人員定位多采用無線定位技術[3-5],該技術通過無線通信的方式獲得移動標簽到基站的距離等信息,從而推算出移動標簽的位置。以線性調頻擴頻(CSS)無線通信技術[6]為例,移動標簽向基站發送Chirp信號,這是一種頻率可調的脈沖信號,該信號經過濾波器后,根據其頻率變化趨勢可以演化成1-0信號。當采用80 MHz帶寬時,頻譜密度較低,但能夠獲取較大的通道增益,從而輕松分辨出脈沖信號,這樣標簽和基站自帶的芯片就能夠識別出傳輸信號的發送時間、對應回復信號到達時間,并記錄在寄存器中,以供計算傳輸路徑長度,從而獲得移動標簽到基站的距離。獲得距離數據以后,再通過各種定位算法,就可以計算出移動標簽的位置了。
常用的基于測距數據的無線定位技術,多是在固定的位置安裝一系列基站,對這些基站所圍成的區域內部的目標進行定位,這種方式下的定位算法主要有三圓定位法[7]、雙曲線法[8]等。三圓定位法,又稱三點定位法、三邊測量法,其定位原理是以3個基站為圓心,目標到基站的距離為半徑作圓,理想狀態下,三圓交于一點,這個點便是目標的坐標點。在實際應用中,由于測量誤差的存在,3個圓往往難以交于一點,需要通過一定的算法(如取中點等)來估計一個相對理想的位置,作為目標位置的最優解。雙曲線法則是利用雙曲線上任意一點到焦點的距離差值為定值的特性,分別以兩對基站為焦點,利用目標到基站的距離差值為參數,構建兩對雙曲線,雙曲線的交點便是目標的所在位置,由于雙曲線的幾何特性,一般會有多個交點,還需要通過一定的方法篩選出唯一的正確解。
然而上述的定位算法只適用于對基站內部區域的目標進行定位,對于處于基站外部區域的目標定位效果并不理想。大型養路機械作業時是沿著鐵軌不斷向前運動的,因此整個定位區域是以車輛為中心的運動區域,這就決定了定位基站只能安裝在養路機械上,而定位目標即施工人員則是在基站所圍成的區域的外部活動。針對這種情況,本研究基于CSS無線通信技術,利用目標到各基站的距離數據,結合當前各種定位算法的特點,提出一種新的定位算法—曲圓定位法。
1 CSS無線通信測距技術
CSS測距技術通過記錄信號在目標與基站之間的傳播時間從而計算出二者之間的距離,所得的距離數據也是曲圓定位法的依據,在此有必要對測距過程進行簡單解說。本研究基于Nanotron公司的nanoLOC Development kit 2.0開發套件,對整個測距過程具體描述如下。
由于CSS測距是基于無線電傳播時間和無線電傳播速度來求得距離值的,而無線電信號在空氣中以光速傳播,測距的關鍵就是要獲得信號的傳播時間。信號從發射到接收,整個過程時間段既包括信號從發出端到接收端的傳播時間,也包括硬件對信號接收并回復所花費的時間,因為傳播時間無法直接獲得,只能通過總的過程時間和回復時間來計算得出。
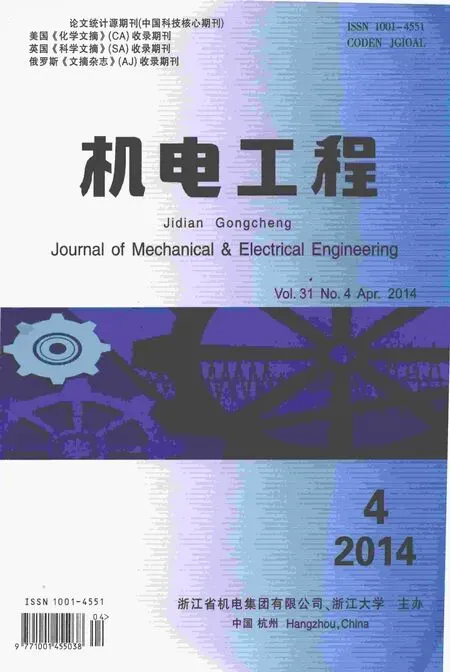
根據整個測距過程中信號傳播的次數,主要有兩種測距方法:一種是雙邊對等兩次測距法(SDSTWR);另一種是非對等單次測距法(Half SDSTWR)[9]。雙邊對等兩次測距法的測距原理如圖1所示。
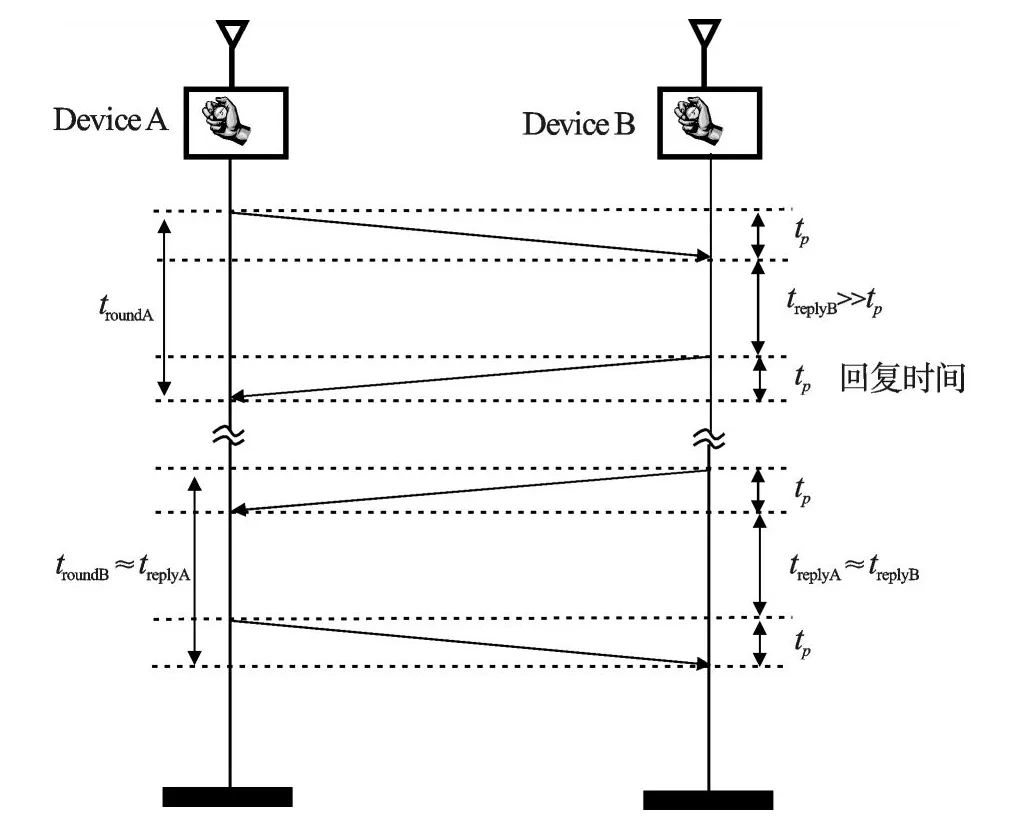
圖1 雙邊對等兩次測距法原理
如圖1所示,為了測得節點A、B之間的距離,先是節點A發出一個數據包,在B接收到數據包以后,硬件會對數據進行處理并生成確認數據發送給A,A收到了B發送來的確認數據后,第1個過程完成。從B發送數據給A到A接收并發送確認數據給B再到B再次接收數據,這是第2個過程。其中信號從B返還給A既是第1個過程的后半段,也是第2個過程的前半段。因此這里的“雙邊”是指測距有兩個節點(A和B)參與;“對等”則是指測距過程是對等的,整個過程既包括信號從節點A發出經過B回復后又被A接收這一往返的過程,又包括信號從節點B發出經過A回復后又被B接收這一往返的過程;“兩次”是指一次測距包含兩個信號往返過程。將信號單次傳輸距離記為d,則整個測量過程中,產生了4次傳輸過程4d,以及2次回復等待時間(treplyA,treplyB),所以單次測量距離計算如下式:

由于troundA,troundB,treplyA,treplyB均能夠通過基帶時鐘測量出來,單次信號傳輸時間、傳輸距離也能夠計算出來。
非對等單次測距法測距過程只包含一次信號的往返過程,相當于只有雙邊對等兩次測距方法的前一個過程,其原理如圖2所示。
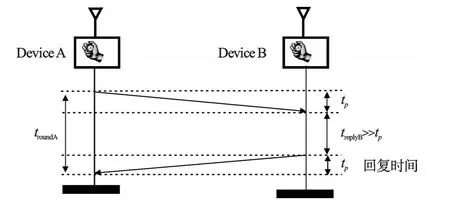
圖2 非對等單次測距法原理
在非對等單次測距法中,距離由下式求得:

式中:troundA—整個過程的時間,treplyB—B的回復時間。
2 曲圓定位法定位原理
利用無線通信的定位技術首先要解決的是基站的布置問題,由于養路機械作業時處于不斷運動的狀態,定位基站需要布置在養路車的車身上。以配砟整形車為例,國內常見的型號是SPZ-200[10],其尺寸為長13 508 mm,寬3 025 mm,高3 900 mm,據此,基站的布置方式如圖3所示,在基站圍成的矩形區域中,基站1、2的距離為3 m,2、3的距離為12 m。
圖3 基站布置方案1,2,3,4—基站1,2,3,4;5—移動標簽;6—信號接收機
曲圓定位算法的流程如圖4所示,將養路機械周圍的定位區域分成4塊,根據所在基站序號記為區域1,2,3,4。當筆者獲得了移動標簽到基站的距離d1,d2,d3,d4時,首先根據d1和d2大小判斷目標處于養路機械的左邊還是右邊,假設d1<d2,則說明目標位于左側,再根據d1和d3的大小判斷目標處于區域1還是區域3,若d1<d3則目標位于區域1,需要使用d2,d3來進行定位,具體劃分準則如表1所示。
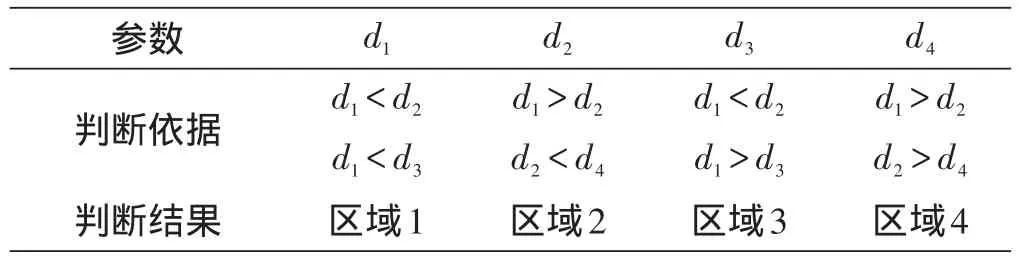
表1 區域劃分準則
以區域1為例,因為雙曲線上的任意點到兩個焦點的距離之差是定值[11],可以根據d2,d3的差值求出一條以基站2,3為焦點的雙曲線,移動目標就位于這條曲線上:
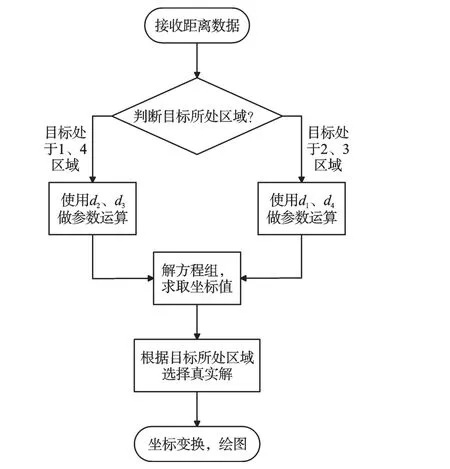
圖4 定位算法流程

同時再根據d2的值求出以基站2為圓心,d2為半徑的圓,移動目標同時也存在于這個圓上:

這樣只需求出雙曲線和圓的交點(一般會出現4個點,分別位于4個區域),再根據預先判斷的目標所處區域就可以篩選出正確的定位坐標,曲圓定位法定位原理示意圖如圖5所示。
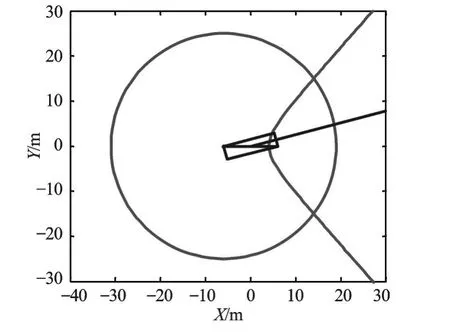
圖5 曲圓定位法定位原理示意圖
在上式中:

式中:l—2、3基站的距離,為12 m。
3 算法的誤差分析

由公式(8)得到φ(1)=0.995。
已知正態分布函數的計算公式為:

令t、σ=u,則公式(9)變為:

令x=1,則:

式中:φ(x)—正態分布函數,φ'(x)—標準正態分布函數。
查標準正態分布表,得到σ=0.388,σ2=0.151,即測距誤差服從方差值為0.151的正態分布。
由于對目標定位的結果取決于目標到兩個基站的距離,定位誤差來源于測距誤差。首先本研究給出一組定位信息(即目標到基站的距離信息),由此計算出目標的真實位置,然后在這組定位信息上加入服從正態分布的隨機數,用于模擬帶有誤差的測量值,并據此計算出目標的測量位置,將測量位置與真實位置相比較,就可以得到在目前測量條件下曲圓定位法的定位誤差了。本研究使用Matlab生成100組數據,其定位結果如圖6所示,其中星號表示目標真實位置,空心圓代表的則是目標的測量位置。
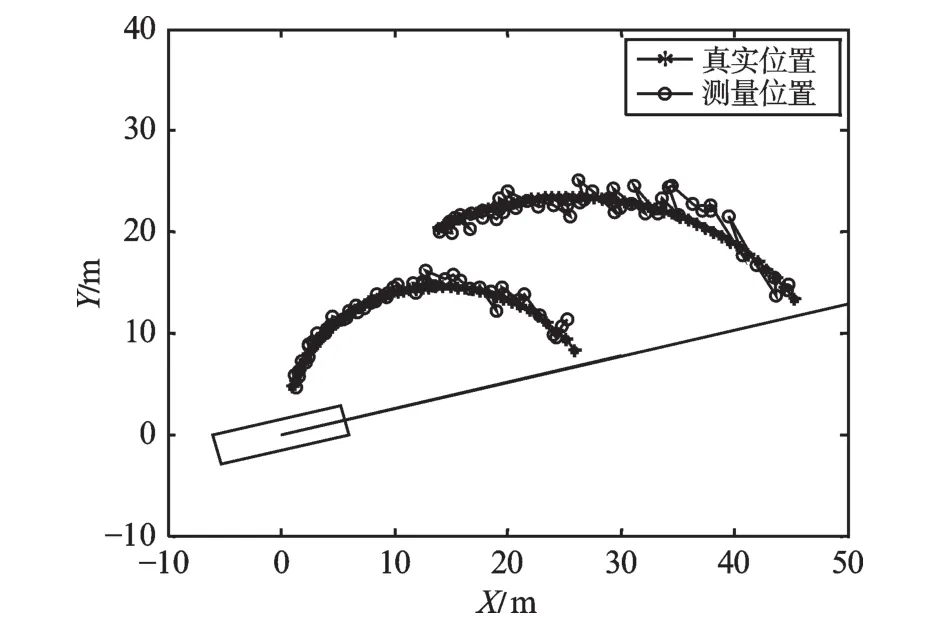
圖6 定位測試實驗樣本及實驗結果
由圖6可以發現,隨著定位距離的增加,定位誤差也有變大的趨勢,考慮到誤差變化的這個特點,在對誤差進行統計分析時,筆者采用誤差對定位距離的比值即相對誤差作為分析指標,結果如表2所示。
由表2的結果可以看到,100組數據中最大相對誤差不超過10%,平均為3.24%。為了清楚地了解相對定位誤差的分布情況,本研究將不同范圍的數據統計出來,其直方圖如圖7表示,可以看出大部分相對定位誤差都低于5%,這說明該定位算法在一定的誤差允許范圍內是有效的。
以及教師的教學能力(36.4%)。對于其他幾項則選擇較少。排在前三位的因素均與學生有關,這與ESP權威學者的研究結論相符合。Hutchison和Waters指出,ESP課程建設應使課程目標和學習者的需求取得一致[5];Robinson認為,ESP課程實質上是一種目標導向課程,應建立在需求分析基礎之上[6]。
4 建立安全判據模型
在獲得大型養路機械作業時周圍施工人員定位結果后,接下來要判斷施工人員所處的安全狀態,因為養路機械是沿著鐵路線作業,可以預先在鐵路線周圍劃分出安全區域,以便系統迅速判斷出目標當前狀態。在理想狀態下,不考慮定位誤差和鐵軌曲率的影響,只需要沿鐵路線左右劃分出5 m的作業區域,在該區域以外認為是安全區域即可。但是實際過程中,由于鐵軌曲率及定位誤差的存在,為了提高系統的安全可靠性,必須根據誤差量擴大潛在危險區域,已知定位誤差隨著定位距離的增加而增加,在之前的模擬試驗中,定位誤差率最大為9.83%,平均為3.24%,本研究在此設定將潛在危險區向安全區域延伸10%的距離值,具體如圖8所示。
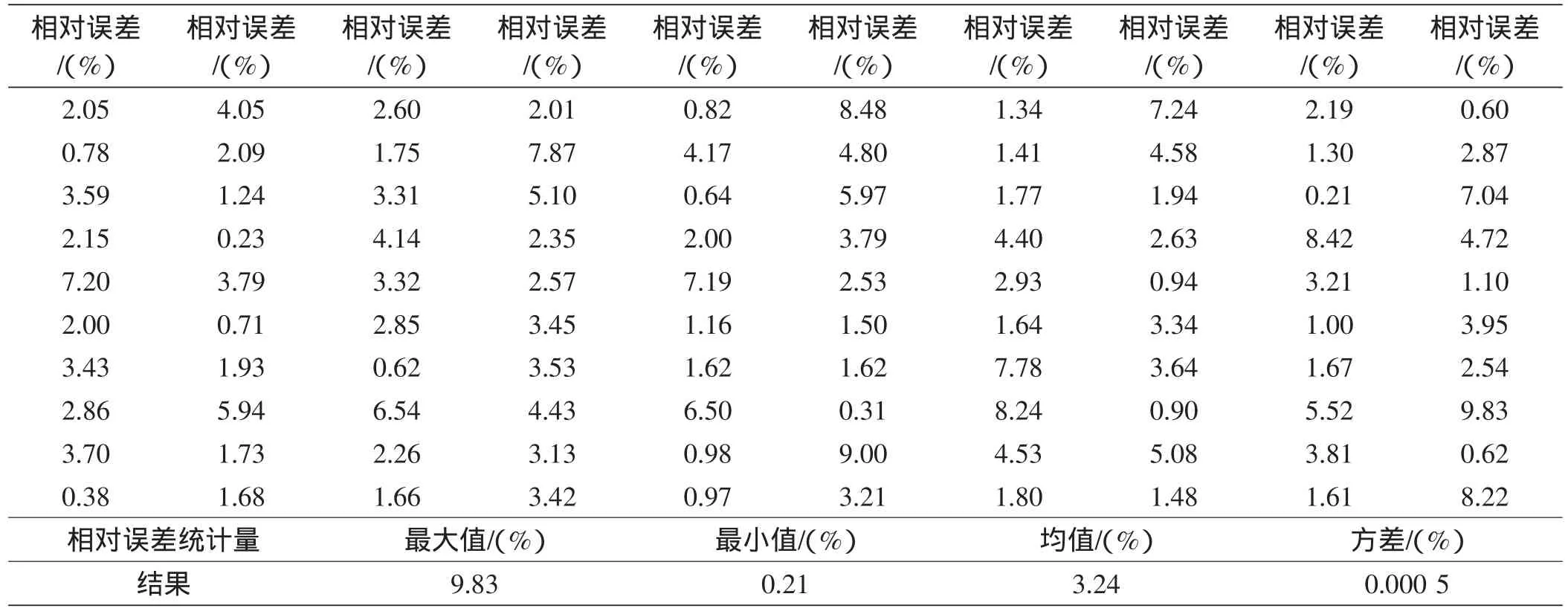
表2 相對誤差統計結果
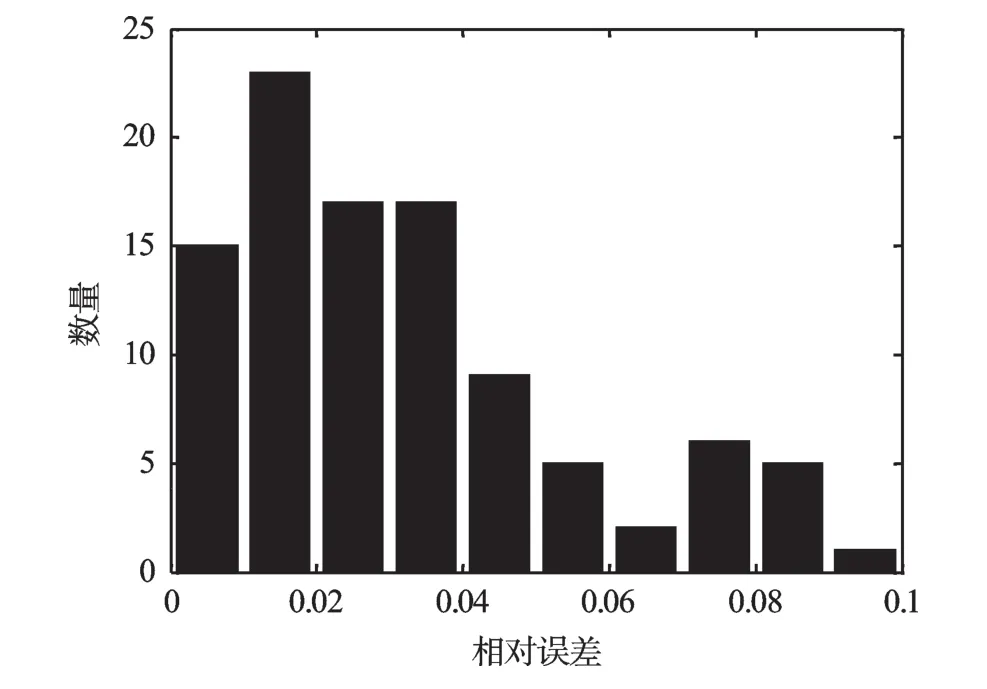
圖7 相對誤差統計量直方圖
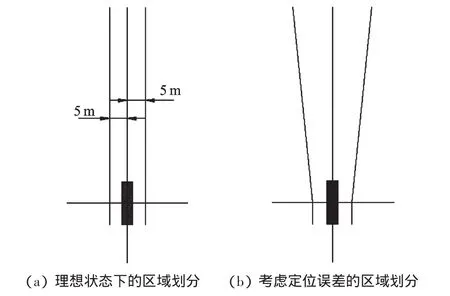
圖8 安全區域劃分
當施工人員進入潛在危險區時,則需要對其狀態進行進一步判斷,在該區域的施工人員的安全狀態包括以下3種情況:
(1)人員距養路車有一定距離,且相對速度為分離的趨勢,這屬于安全狀態;
(2)人員距養路車有一定距離,按當前速度在一段時間后會碰撞,但是有充足的時間進行避險,這屬于緩沖狀態;
(3)人員距養路車較近,即便減速也會發生碰撞,這屬于危險狀態。
綜上所述,建立施工人員的安全模型,如下式所示:
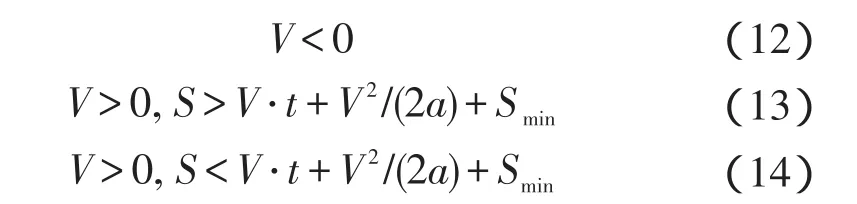
式中:V—目標相對車的速度,負值表示遠離;S—目標到車頭的距離,可由定位結果計算得到,而相鄰兩次S的變化情況可近似算出V;t—司機的反應時間,正常司機的反應時間為0.3 s~1.0 s;a—作業車的制動加速度;Smin—人與車的最短距離,設定為1 m,即二者距離小于1 m等同于發生碰撞。
而t,a,Smin已知,因此,這個安全模型是可行的。
以上3個公式分別代表安全、緩沖、危險3種狀態,當目標處于安全狀態時,保持繼續監測;目標處于緩沖區域時,系統向司機發出警報,提醒司機注意潛在危險;目標處于危險區域時,系統通過擴音器發出警報,一方面提醒施工人員迅速離開危險區域,另一方面提醒司機采取減速措施,為工人避險爭取足夠的時間,區域劃分如圖9所示。
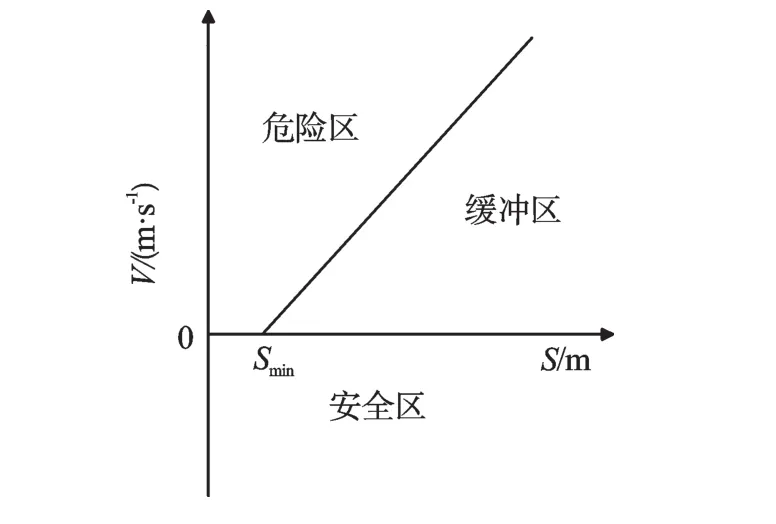
圖9 施工人員所處區域判據
5 系統的設計開發
為了實現目標的自動定位、狀態判斷,以及定位結果的可視化功能,本研究依據曲圓定位算法設計了一個簡單的定位軟件,使用Matlab自帶的GUI功能模塊[12]可以較為容易地設計出該定位軟件。
軟件界面如圖10所示,左邊是數據運算部分,實現距離參數的輸入、運算以及位置坐標的輸出等功能;右邊是地圖顯示部分,實現結果的可視化功能。當輸入的參數是[6 8 18 20],運行后,系統判斷出目標處于區域1,使用8、18為定位參數,計算出并經過坐標變換后輸出目標的坐標為(-3.564 68,12.053 8),同時右邊的坐標系中顯示出目標相對車體的位置,目標處于邊界內部,因此顯示為圖中粗實線,表示處于潛在危險區,提示司機可能會有碰撞危險,需要特別關注。

圖10 定位軟件主界面及演示
6 結束語
本研究提出了基于CSS無線通信技術的養路機械周圍施工人員防碰撞技術,并對該技術中的人員定位、安全狀態判斷等重點問題進行了研究。針對人員定位問題,本研究在獲得了目標到各基站的距離數據的情況下,提出了一種新的定位算法。依靠定位結果,還建立了一個判斷人員狀態的安全模型并演示了利用軟件界面實現定位功能的過程。仿真實驗結果表明,該防碰撞技術可以幫助司機實時了解周圍人員動態,對避免養路作業時人員碰撞事故的發生具有實用價值。
(References):
[1] 鄭中立.我國鐵路大型養路機械發展回顧(連載之五)[J].鐵道建筑,2004(7):3-6.
[2] 王發燈.配砟車避障系統的設計[J].鐵道建筑,2008(1):28.
[3] 谷 靜,毛永毅,李明遠.無線定位技術[J].西安郵電學院學報,2002,7(3):25-27.
[4] 馬 梁,彭 保.一種基于RSSI的無線傳感網絡安全定位算法[J].兵工自動化,2012,31(3):44-46.
[5] 賴春強,陳利華.基于FLR9G30無線通信系統的通信距離及速率估算[J].兵工自動化,2013,31(10):57-59.
[6] KIM J E,KANG J,KIM D,et al.IEEE 802.15.4a CSS-based localization system for wireless sensor networks[C]// Mobile Adhoc and Sensor Systems,2007.MASS 2007.IEEE Internatonal Conference on.Pisa:[s.n.],2007:1-3.
[7] 王中生,曹 琦.基于ZigBee技術的無線定位研究與實現[J].計算機技術與發展,2010,20(12):189-192.
[8] 陳 健.面向3GPP-LTE終端無線定位的參數估計與定位解算研究[D].成都:成都電子科技大學通信與信息工程學院,2011.
[9] 梁久禎.無線定位系統[M].北京:電子工業出版社,2013.
[10]曹昆山.SPZ-200型雙向道床配碴整形車走行系統的匹配分析[J].鐵道標準設計,1998(5):46-48.
[11]王益平,王 皓,吳 衡,等.基于到達時差的低功耗聲音定位系統[J].機電工程,2013,30(8):1015-1019.
[12]羅華飛.Matlab GUI設計學習手記[M].北京:北京航空航天大學出版社,2009.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電測與儀表(2015年5期)2015-04-09 11:30:52