改進幀差與分水嶺算法融合的運動目標檢測法
2014-03-29 02:10:04黃應清閆興鵬
激光與紅外 2014年12期
關鍵詞:檢測
黃應清,趙 哲,閆興鵬,趙 鍇
(1.裝甲兵工程學院控制工程系,北京100072;2.裝甲兵工程學院 信息工程系,北京100072)
1 引言
運動目標檢測和提取已成為機器視覺研究的熱點問題,在智能監控、交通控制、軍事戰場的應用越來越廣泛。運動目標檢測算法主要有:光流分析法、幀間差分法和背景差分法三種[1-4]。近年來,學者們提出了許多新的運動目標檢測算法,以W4[5]算法、基于MAP-MRF[6](Maximum A Posteriori-Markov Random Field)檢測算法最為突出。W4算法作為一種參數建模算法,運算效率較高,但抗噪性一般;基于MAP-MRF框架的運算效率未取得突破,實時性有待提升。幀間差分法對相鄰幀進行差分運算[7],系統資源要求少且能保證實時處理。本文運用基于方差齊性檢驗的三幀差法檢測運動目標,融合優化分水嶺算法,經檢驗,本文方法更適于視頻檢測中消除噪聲及運動目標檢測的問題。
2 基于方差齊性檢驗的改進幀差法
幀差法是一種檢測臨近幀變化量的一種方法[7],通過序列圖相鄰兩幀或三幀,進行一定圖像運算來檢測目標[8]。圖1(a)表示為相鄰兩幀的差分圖。
采用三幀差法[9]時,將三幀的圖像進行三幀差分,中間幀和前一幀差分與后一幀與中間幀差分得到兩幅灰度圖像,將結果圖像d1(i,j)和d2(i,j)進行邏輯與運算,如式(1)所示,從而得到三幀差分圖像ds1(i,j),如圖1(b)所示。本算法提出二次三幀差法,即用后兩幀差分與三幀差分結果邏輯異或運算,如公式(2)所示,結果如圖1(c)所示。異或結果再與三幀差分圖相與運算如公式(3)所示,結果如圖1(d)所示。

圖1 幀差法的原理圖
采用二次三幀差法,輪廓變細,可一定程度上解決“雙影”問題,比三幀差分更接近實際目標輪廓。



式中,mean x,( )y為窗口內所有像素均值。本算法取N=4。
關于計算S2b,需要從有限幀差樣本中估算全局背景像素總體方差σb2。由大量實驗可知,檢測視頻左側的若干列像素通常屬于背景像素,因為檢測運動目標不會長期占據圖像一側。由此,可提出計算S2b的辦法。將左側K列像素分割成數個K×K的窗口,獲取WK窗口的像素絕對值總和選最小窗口W為樣本,同樣,按式(6)計算S2b。
依照幀差圖每個像素dsx,( )y的F檢驗結果,可得到關于當前幀的運動檢測掩模:

經由F檢驗的檢測圖結果可看出,該算法仍存在部分噪聲,同時可能漏檢測,將運動像素歸為背景區域。這在于融合空間域的分割算法以完善運動目標缺失甚至漏檢情況,而分水嶺算法的分割效果可以很好的滿足上述要求。
3 分水嶺算法優化
3.1 分水嶺算法原理
分水嶺算法是在借鑒形態學基礎上,將一幅圖看作是測地學上的拓撲地貌,每個像素點灰度值對應地形的高度值。高度值對應山峰,低灰度值對應山谷[10-11]。不足之處在于算法容易受噪聲的影響,存在嚴重的過分割或丟失重要分割線等現象[12]。
直接采用分水嶺算法很難得到滿意的分割效果。這依賴前期的形態學處理加以優化及后期與幀差法融合獲取標記區域進行合理分割。
3.2 數學形態學方法優化
圖像的高帽濾波(Top-hat filtering)定義為:

圖像的低帽濾波(Bottom-hat filtering)定義為:

式(8)中。表示開運算,高帽變換可有效檢測圖像邊緣信息,增強陰影細節,以增強圖像對比度。式(9)中·表示閉運算,低帽變換可以去除圖像極暗細節,以尋找圖像的灰度谷值,使分水嶺線更加準確。
擬合高帽濾波、低帽濾波的形態學處理方法增強圖像,便于微弱邊緣檢測。用原圖像加上高帽變換后的圖像,如圖2(a)所示,再減去低帽變換后的圖像,如圖2(b)所示,增強圖像如圖2(d)所示。

圖2 效果對比圖

式中,原圖加高帽變換結果,可使圖像中灰度值較大的區域更亮;再減低帽變換結果,可使圖像中灰度值較小的區域更暗,目標和背景反差明顯。
為驗證圖2(d)的銳化效果顯著,現設圖像為g( i,j),窗口尺寸定為 ( 2w+1)× ( 2w+1 ),則其自相關函數定義為式(11),它對窗口內的每個像素點 ( i,j)與偏離值ε,η=0,±1,±2,…的像素間相關值作計算:
圖2的自相關函數三維圖如圖3所示,圖像的邊緣信息的自相關函數隨著ε、η的增加,圖3(a)的下降趨勢比圖3(b)要慢。根據文獻[13]可知,自相關函數波峰寬度同圖像銳度指數成正比。可見圖2(d)更加清晰,增大了圖像和背景反差。

圖3 自相關函數對比圖
本算法設定可手動調整分水嶺低谷閾值,對不同背景復雜度的視頻序列選取較為合適的分割閾值。分水嶺算法通過允許在梯度圖像上和片段連接的標識區域“擁有”邊沿定義的山谷來分割圖像。改進分水嶺分割效果圖如圖4所示。
圖4 改進分水嶺分割效果
4 算法融合
在已經獲得的分割結果的基礎上,對運動目標的檢測問題定義如下:已知當前幀It的運動檢測掩模和分割標注圖像Iw,及前一幀的運動目標掩模Mt-1,利用三幅圖生成當前幀的運動掩模。
算法融合步驟如下:
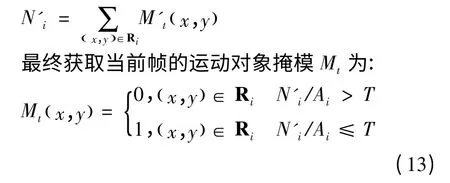
首先結合當前幀It的運動檢測掩模Mpt,分析當前幀的分割標注圖像Iw各個區域,統計區域Ri的像素在Mpt中為1的數目Ni,和其在區域Ri面積Ai中的比例,大于閾值T,則標記Ri為運動區域。標記完當前幀所有運動區域后,即獲得僅由當前幀運動所造成的運動區域掩模MRt,如下式所示:
即:
該融合算法有如下優點:一是具有記憶前一幀運動對象分割的積累結果;二是在視頻序列前處理若干幀,視頻對象會逐漸完整;三是相鄰幀若目標沒有運動仍能保證分割出完整目標。缺點是較大運動情況下,運動目標檢測結果可能有多余背景。
5 實驗結果與分析
運用Visual Studio 2012軟件和OpenCV2進行實驗仿真,對運動目標的視頻序列進行實驗,F檢驗由Visual Studio調用Matlab統計工具箱函數vartest2實現。
結合實驗視頻1對改進的幀差法效果進行比對,實驗結果如圖5所示。
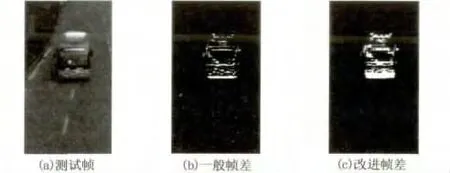
圖5 改進三幀差實驗效果對比圖
實驗結果表明,本文采用的基于方差齊性檢驗的改進幀差法,得到的動態像素點情況更接近于實際,對于監控系統中消除雜波和運動目標檢測有著較好的處理效果。
對連續三幀圖像進行改進的幀差運算,獲取目標大致輪廓,與當前幀獲得的優化分水嶺算法輪廓進行融合,實驗結果如圖6所示。因為分水嶺算法獲得的類似地形的拓撲地貌圖,過分割情況使其并不能完整截取目標輪廓。由F檢驗獲取的區域內運動像素點,與分割出多個區域的分水嶺算法融合,就可很好地獲取目標的輪廓信息。同時基于對運動目標內部信息的感興趣程度,適當調整分水嶺算法的低谷像素閾值,也可取得不錯的效果,由此基本解決了一般幀差法存在目標“空洞”及輪廓檢測問題。
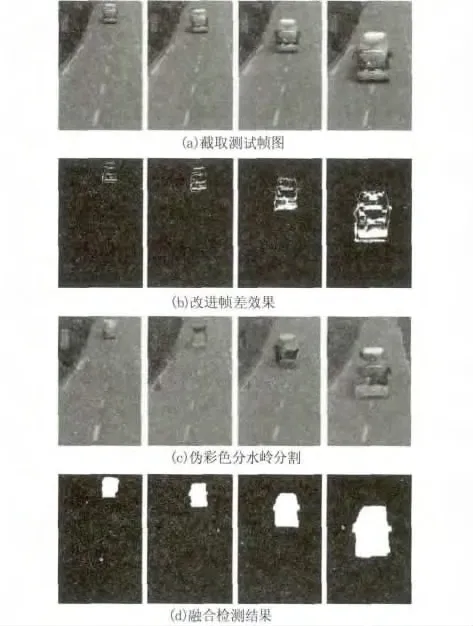
圖6 實驗結果
圖7 給出了較為復雜環境下視頻序列的實驗結果,其中圖7(a)為原視頻圖像某測試幀,圖7(b)為分水嶺結果,圖7(d)為融合檢測結果。
根據檢測率(PR)和虛警率(FR)兩個指標[14],對算法進行定量比對,用公式描述如下式中:
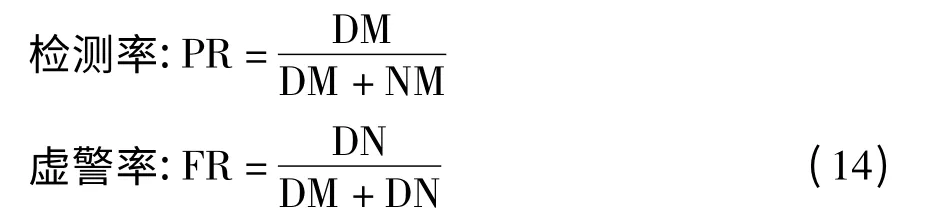
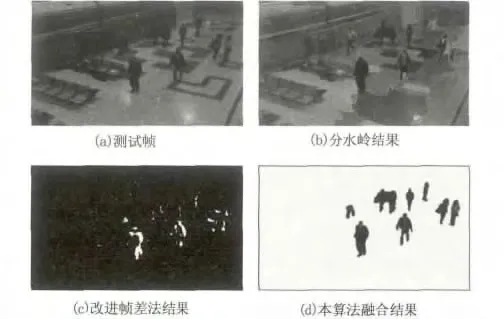
圖7 復雜環境視頻測試結果
其中,DM為檢測出來屬于運動目標的像素點數,DN為檢測出來不屬于運動目標的像素點數,NM為未檢測出來的運動目標像素點數。對目標檢測結果進行定量分析,如表1所示。

表1 目標檢測結果
改進后,針對算法復雜度測算,由算法執行效率體現,如圖8所示。
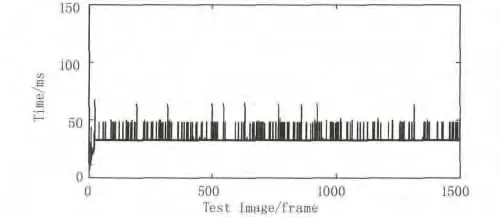
圖8 算法執行效率
結果表明,該改進的運動目標檢測算法有效。
但對于目標和背景顏色相近的多目標情況,算法效果一般,出現的漏檢測絕大部分出自于此。分析結果是由兩方面原因造成的。一是可能被漏檢的區域像素值變化不大,未大于F檢驗設定的閾值;二是分水嶺算法和改進幀差法對目標的輪廓獲取不完整,這關乎于分水嶺的低谷閾值像素選取問題。
6 小結
本文對運用幀差法檢測運動目標的方法進行了研究,介紹了幀間差分目標檢測過程,并提出一種融合分水嶺分割算法并基于方差齊性檢驗的改進幀差法的運動目標檢測方法。
通過實驗驗證,該方法可獲得真實目標的輪廓,同時有效地去除無用信息。系統對運動物體所在的環境沒有特殊約束,所以這種方法可以應用到很多視頻場所中。
下一步的工作考慮不采用傳統經驗給定值,在檢測前引入先驗信息,則可大幅度提高分割以及融合的魯棒性;同時運行速度有待進一步提升,可采用分水嶺區域映射法,對幀差獲取的目標大致區域內的像素值進行分水嶺分割,對連續兩幀,極值點進行雙向匹配,可直接對目標結果進行跟蹤。
[1] Horn B K,Schunch B G.Determining optical flow[J].Artificial Intelligent,1981,17:185-203.
[2] SUN Shaoyuan,GU Xiaoqian,GE Man,et al.Pedestrian detection and tracking of vehicle infrared images[J].Laser&Infrared,2012,42(8):949-953.(in Chinese)孫韶媛,谷小婧,戈曼,等.車載紅外圖像的行人檢測與跟蹤技術[J].激光與紅外,2012,42(8):949-953.
[3] YANG Shun,ZHAO Baojun,MAO Erke,et al.Non-uniformity correction algorithm based on registration of different motions of target and background[J].Laser&Infrared,2013,43(11):1286-1290.(in Chinese)楊碩,趙保軍,毛二可,等.基于目標與背景相異位移配準的非均勻校正算法[J].激光與紅外,2013,43(11):1286-1290.
[4] DAI Kexue,LI Guohui,TU Dan.Prospects and current studies on background subtraction techniques for moving objects detection from surveillance video[J].Journal of Image and Graphics,2006,11(7):921-927.(in Chinese)代科學,李國輝,涂丹,等.監控視頻運動目標檢測減背景技術的研究現狀和展望[J].中國圖象圖形學報,2006,11(7):921-927.
[5] Haritaoglu I,Harwood D,Davis L S.W4:Real-time surveillance of people and their activities[C]//IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22:809-830.
[6] Sheikh Y,Shah M.Bayesian modeling of dynamic scenes for object detection[C]//IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27:1778-1792.
[7] GAN Minggang,CHEN Jie,LIU Jin,et al.Moving object detection algorithm based on three-frame-differencing and edge information[J].Journal of Electronics&Information Technology,2010,32(4):894-897.(in Chinese)甘明剛,陳杰,劉勁,等.一種基于三幀差分和邊緣信息的運動目標檢測方法[J].電子與信息學報,2010,32(4):894-897.
[8] ZHAO Ji,FENG Chuang,SHAO Fuqun,et al.Moving object detection and segmentation based on adaptive frame difference and level set[J].Information and Control,2012,41(2):153-158.(in Chinese)趙驥,馮闖,邵福群,等.基于自適應幀差和水平集的運動目標檢測和分割[J].信息與控制,2012,41(2):153-158.
[9] Gregory M Wojcik,Wieslaw A Kaminski.Liquid state machine built of hodgkin-huxley neurons and pattern recognition[J].Neurocomputing,2004,58-60:245-251.
[10]ZHANG Lihong,LIANG Yingbo,WU Dingyun.Watershed algorithm research of medical image segmentation based on fuzzy enhancement[J].Laser&Infrared,2013,43(11):1307-1310.(in Chinese)張利紅,梁英波,吳定允.基于模糊增強的醫學圖像分割分水嶺算法研究[J].激光與紅外,2013,43(11):1307-1310.
[11]Grau V,Mewes A U J,Alcaniz M.Improved watershed transform for medical image segmentation using prior information[J].IEEE Trans on Medical Imaging,2004,23(4):447-460.
[12]HAN Feng.Research on the technologies of an adaptive watershed digital image segmentation[D].Changsha:Hunan University,2007.(in Chinese)韓峰.一種自適應分水嶺數字圖像分割技術研究[D].長沙:湖南大學,2007.
[13]SONG Kang,ZHANG Tao,LIAO Junbi.Theoretical analysis of autocorrelation function of image as sharpness evaluation function[J].Journal of Southwest Jiaotong Unviersity,2008,43(5):578-581.(in Chinese)宋康,張濤,廖俊必.圖像自相關函數作為清晰度評價函數的理論依據[J].西南交通大學學報,2008,43(5):578-581.
[14]Fakharian A,Hosseini S,Gustafson T.Hybrid object detection using improved gaussian mixture model[C]//International Conference on Control,Automation and Systems,2011:1475-1479.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
