模糊免疫自適應PID控制在封水泵流量控制中的應用
2014-04-08 07:53:45張紅升繆袁泉丁琪聞峣
上海海事大學學報 2014年1期
張紅升, 繆袁泉, 丁琪, 聞峣
(中交疏浚技術裝備國家工程研究中心有限公司, 上海 201208)
0 引 言
封水泵通過向泥泵軸端和吸入端注水,防止泥泵工作過程中泥沙進入泵軸損壞泥泵.在實際施工過程中,隨著泥泵轉速及串并聯工況的變化泥泵內部壓力不斷變化.為保證封水流量恒定,往往需要操作人員不停地調節封水泵轉速,這使操作人員工作強度較大而且調節滯后性嚴重.目前控制封水泵的方法主要有高低兩檔調速和泥泵轉速曲線擬合兩種.高低兩檔調速雖然能滿足封水流量的要求,但封水泵長時間工作在高功率輸出模式下不利于節能減排,也會增加設備磨損.曲線擬合方法因不能區分泥泵串并聯模式,在實際應用中受到很大限制.
為使封水泵控制更加自動化和智能化,即能根據封水流量的反饋值自動調整封水泵轉速,進而調節封水流量至設定值,無須人為干預,本文引入模糊免疫自適應比例積分微分(Proportion Integration Differentiation, PID)控制方法對封水泵進行自動控制,通過模糊推理對PID參數進行自適應整定,達到靈活準確的控制目的[1].
1 封水泵工作及控制原理
泥泵是挖泥船的核心疏浚設備之一.在工作過程中,泥泵殼內會產生很大的壓力,泵殼內的泥沙可能會在高壓作用下沖破泥泵軸端和吸入端的水封,進而損壞泵軸.
1.1 封水泵工作原理
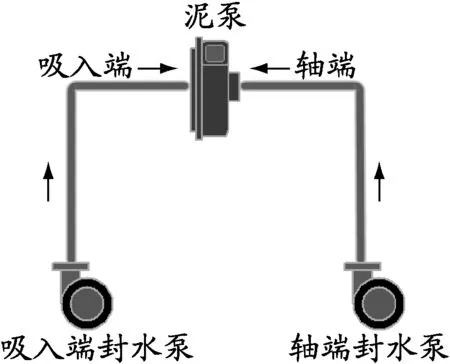
圖1 封水泵工作示意
封水泵安裝在泥泵旁邊,通過管路將清水注入泥泵軸端和吸入端,防止泥沙損壞泵軸,見圖1.泥泵運轉前需要先啟動封水泵,在運轉過程中需要不斷調整封水泵轉速使封水流量不低于設定值.
1.2 封水泵控制數學模型
為保證泥泵正常工作,通常需要設定一個封水流量F′,封水流量與封水泵轉速成正比例關系,通過調節封水泵轉速可以調節封水流量.系統根據實際封水流量的反饋值F,通過PID整定,依據轉速與流量的正比例關系控制封水泵的速度,進而達到控制封水流量的目的.封水泵控制模型見圖2.
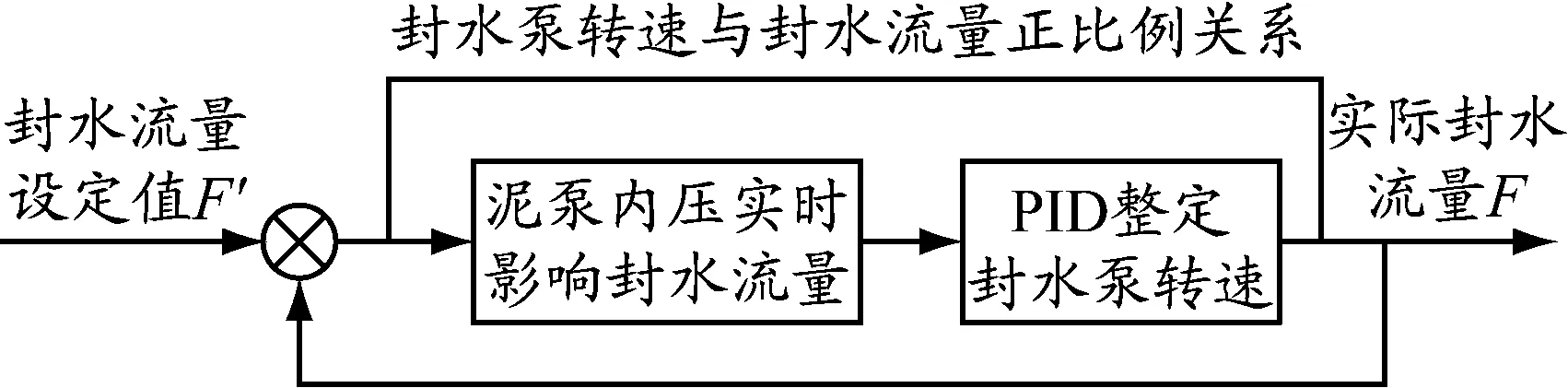
圖2 封水泵控制模型
2 模糊免疫自適應PID控制
2.1 控制器概述
PID控制作為一種高效穩定的控制方法廣泛應用于工業控制中.常用的PID控制器有:常規PID控制器、模糊PID控制器、模糊免疫PID控制器.常規PID控制器僅靜態控制參數,不適用于非線性和大時滯系統控制.模糊PID控制器運用模糊控制原理,可在線動態整定控制參數,在非線性和大時滯控制系統中得到良好應用.模糊免疫PID控制器引入生物免疫學原理,結合模糊控制方法在線自適應整定控制參數,在實際應用過程中其性能比模糊PID控制器更加優越.
2.2 免疫反饋原理
根據文獻[1-4]中對免疫系統的描述,生物免疫系統由T細胞和B細胞組成[2].T細胞可以根據外來抗原的數量分泌TH細胞和TS細胞,TH細胞用于刺激B細胞生成,TS細胞用于抑制B細胞產生.[3]當外來抗原較多時分泌的TH細胞量增加,TS細胞量減少;當外來抗原較少時,分泌的TH細胞量減少,TS細胞量增加.B細胞可以分泌抗體,抑制外來抗原的數量.[4]生物免疫系統機理[5]見圖3.
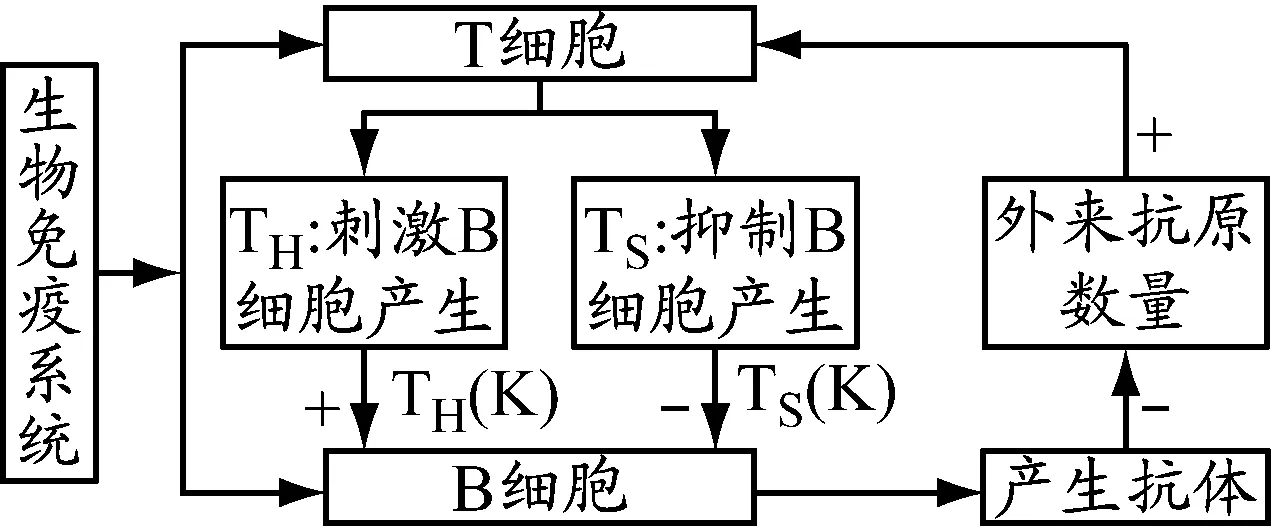
圖3 生物免疫系統機理
2.3 模糊免疫自適應PID控制器設計
模糊免疫PID控制器是根據生物免疫系統機理設計出的一個非線性控制器.根據文獻[5-6]中對免疫PID控制器的推導可知增量式免疫PID控制器的輸出[6]
U(k)=U(k-1)+KP1(e(k)-e(k-1))+KIe(k)+
KD(e(k)-2e(k-1)+e(k-2))
(1)
式中:KP1=K(1-ηf(U(k),ΔU(k)))為比例調節系數(K=K1為控制反應速度(K1為激勵因子);η=K2/K1為控制穩定效果(K2為抑制因子);f(*)為選定的非線性函數,表示細胞抑制刺激能力的大小,取值限定為[0,1));KI為積分系數;KD為微分系數[7];e為封水泵實際流量與設計流量的差值.
在實際施工過程中封水流量隨泥泵內壓實時變化,為保護泥泵,要求在封水流量小于設定值時系統能快速將流量增大到設定值,但對絕對精度要求不高.根據封水泵控制特點,本系統PID控制模式為:采用模糊免疫PID控制方法在線整定控制器的比例系數KP,采用模糊PID控制方法在線整定KI和KD.
模糊免疫自適應PID控制器的結構見圖4,系統輸入為封水流量設定值F′,反饋值為封水泵的實際流量F.PID控制器輸入為e及其變化率Δe.模糊免疫調節實時計算出KP1,模糊推理系統實時計算出積分整定系數ΔKI和微分整定系數ΔKD.PID控制器的參數KP,KI,KD計算式為
(2)

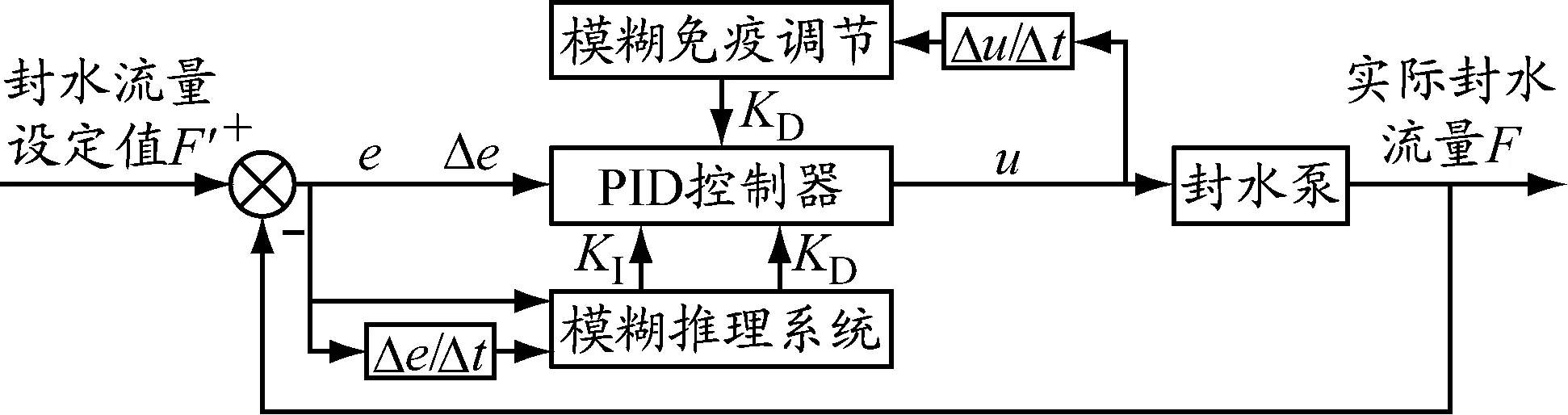
圖4 模糊免疫自適應PID控制器結構
2.3.1 模糊免疫自適應PID控制器比例參數模糊免疫自調整
由式(1)可知,免疫PID控制的重點是比例參數中非線性函數f(*)的選取.[8]逼近非線性函數的方法很多,常用且最簡單的方法是采用模糊控制器逼近非線性函數.本文采用一個二維模糊控制器逼近非線性函數f(*)[9-12],輸入、輸出變量模糊化參數見表1.
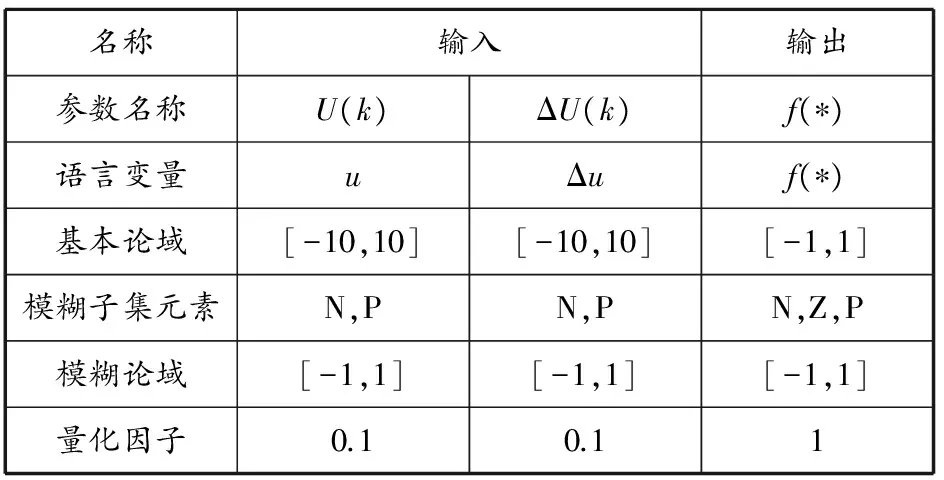
表1 輸入、輸出變量模糊化參數
為求出變量在模糊子集內的隸屬度,作出輸入、輸出變量的隸屬度函數曲線[13],見圖5.

圖5輸入、輸出變量隸屬度函數曲線
根據李亞普諾夫穩定性定理,逼近非線性函數f(U(k),ΔU(k))的模糊控制規則[14]見表2.
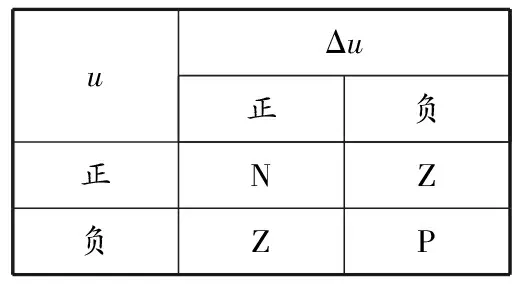
表2 模糊控制規則
2.3.2 模糊免疫自適應PID控制器積分和微分參數模糊自調整
系統積分和微分參數采用模糊控制進行整定,將e和Δe作為模糊控制器輸入,輸出為ΔKI和ΔKD.輸入、輸出變量模糊化參數見表3.
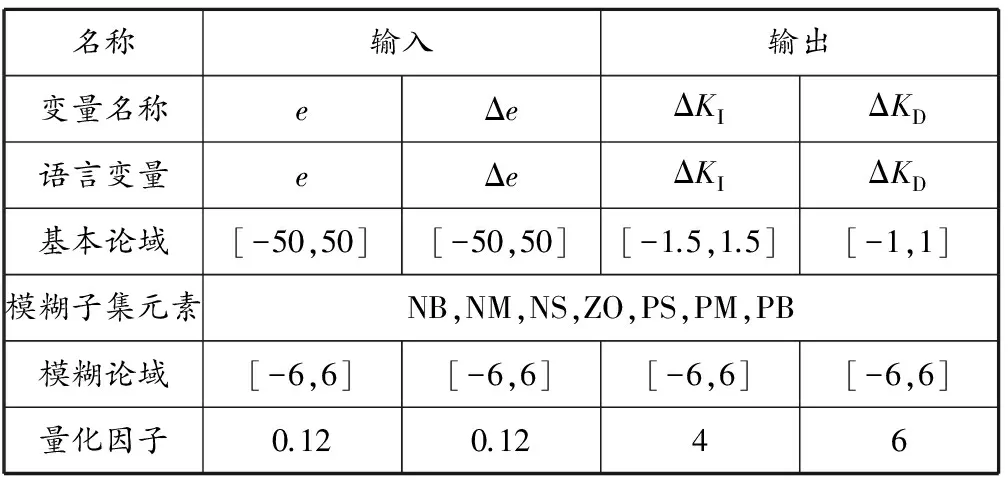
表3 輸入、輸出變量模糊化參數
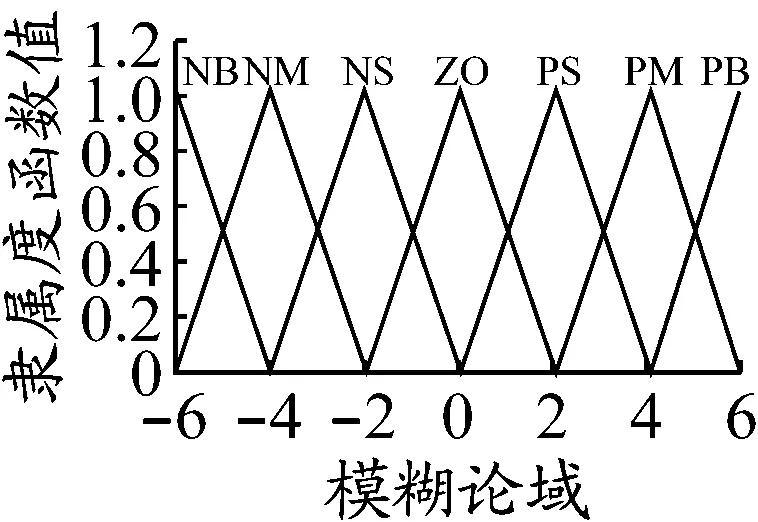
圖6 三角隸屬度函數曲線
考慮到設計簡便及實用性要求,采用三角隸屬度函數,見圖6.根據實際操作經驗和PID參數整定規則,得到對ΔKI和ΔKD整定的模糊控制規則,見表4和5.
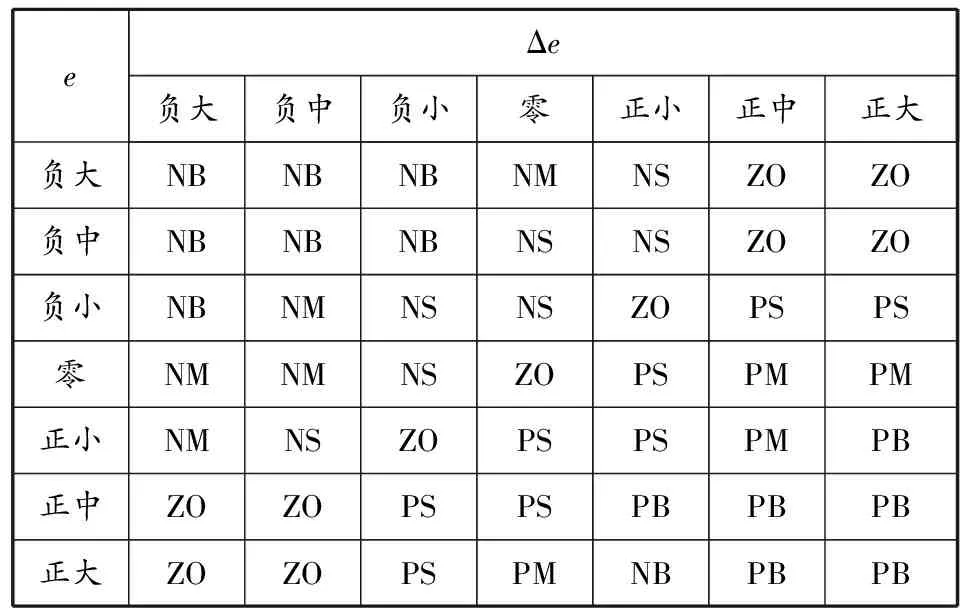
表4 ΔKI模糊控制規則
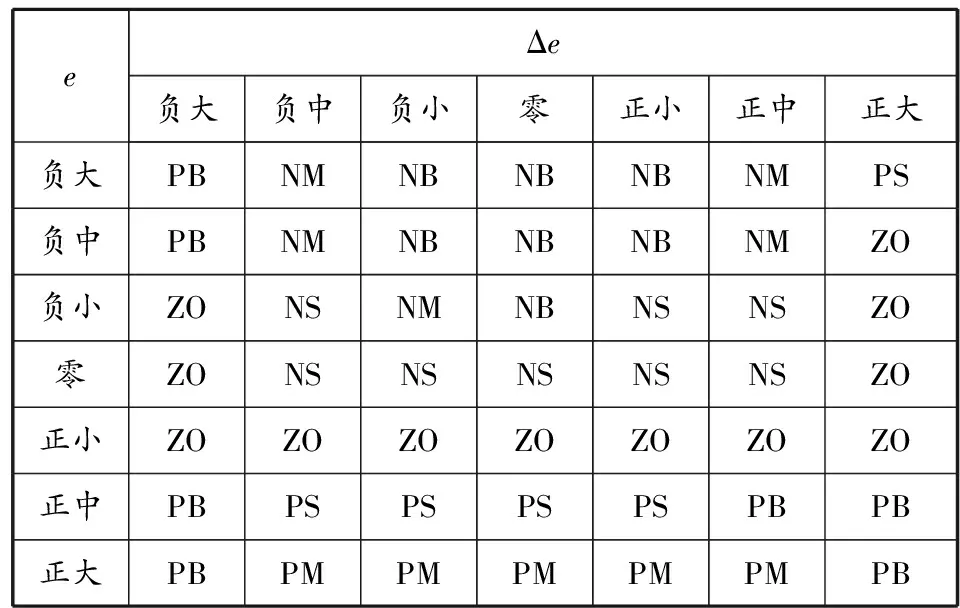
表5 ΔKD模糊控制規則
3 仿真分析
由圖7可知,模糊免疫自適應PID控制器較常規PID控制器控制響應時間短、超調量小、動態穩定效果好.
4 應用實例

為直觀地分析模糊免疫自適應PID控制器的動態控制效果,將實船檢測的模糊免疫自適應PID控制數據與常規高低兩檔控制數據進行對比,見表6.
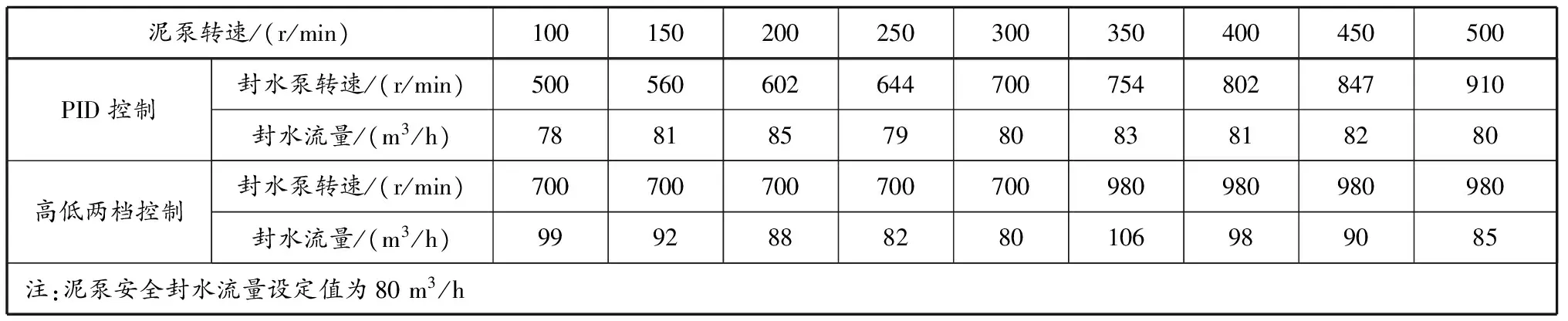
表6 實船控制數據對照
由表6可知:PID控制模式可以控制封水泵以最低的轉速輸出安全封水流量;高低兩檔控制模式雖然能保障安全封水流量,但是封水泵轉速一直較大,封水流量超出安全設定值較多,造成不必要的能源消耗且使設備磨損加快.由此可見,模糊免疫自適應PID控制器可以很好地對封水泵流量進行控制.
5 結論
基于西門子PLC的模糊免疫自適應PID控制器可以根據泥泵工況自動動態調整封水泵轉速,從而保持設定的封水流量.其自動動態調整的特性使其在解放人的勞動力的基礎上,最大限度地減少封水泵的能源消耗和設備磨損.本控制器在上海航道局新海虎8號10 000 m3耙吸挖泥船上得到很好的應用.
參考文獻:
[1]王培勝, 胡知斌. 模糊自適應PID控制在耙吸式挖泥船主動耙頭的應用[J]. 中國港灣建設, 2012(4): 107-110.
[2]付冬梅, 鄭德玲, 位耀光, 等. 人工免疫控制器的設計及其控制效果的仿真[J]. 北京科技大學學報, 2004, 24(4): 442-445.
[3]談英姿, 沈炯, 呂震中. 免疫PID控制器在氣溫控制系統中的應用研究[J]. 中國電機工程學報, 2002, 22(10): 148-152.
[4]王東風, 韓璞. 基于免疫遺傳算法優化的氣溫系統變參數PID控制[J]. 中國電機工程學報, 2003, 23(9): 212-217.
[5]劉金琨. 先進PID控制MATLAB仿真[M]. 北京:電子工業出版社, 2005.
[6]丁永生, 任立紅. 一種新穎的模糊自調整免疫反饋控制系統[J]. 控制與決策, 2000, 15(4): 443-446.
[7]孫濤. 基于模糊免疫自適應PID的智能控制算法的研究[D]. 大連: 大連海事大學, 2009.
[8]王斌, 李士勇. 模糊免疫非線性PID控制的仿真研究[J]. 哈爾濱商業大學學報, 2006, 22(6): 72-75.
[9]季本山. 基于PLC的模糊PID船舶自動舵[J]. 上海海事大學學報, 2009, 30(4): 57-62.
[10]鄭天府, 肖健梅, 王錫淮, 等. 同步發電機線性多變量與PID結合的勵磁控制[J]. 上海海事大學學報, 2006, 27(2):37-41.
[11]王洋, 林葉春, 梁森, 等. 軌道龍門吊行走大車的啃軌問題及糾偏控制[J]. 上海海事大學學報, 2008, 29(3): 65-70.
[12]王正林, 王勝開, 陳國順. MATLAB/SIMULINK與控制系統仿真[M]. 北京: 電子工業出版社, 2005.
[13]王斌, 李愛平. 模糊免疫非線性PID控制的優化設計[J]. 控制工程, 2007,14(S1): 81-83.
[14]王焱. 模糊免疫PID控制器的設計與研究[J]. 計算機仿真, 2002, 19(2): 67-69.
[15]辛菁, 劉丁, 杜金華, 等. 基于遺傳整定的模糊免疫PID控制器在液位控制系統中的應用研究[J]. 信息與控制, 2004, 33(4): 481-485.
[16]SIEMENS. 用于S7300和S7400系統和標準功能的系統軟件參考手冊[M]. 北京: Siemens AG, 2004: 25.