基于xPC Target平臺的實船訓練系統
2014-04-14 04:21:26李又一王海燕
科技視界 2014年12期
李又一 王海燕 喬 南
(上海海事大學 商船學院,中國 上海 201306)
0 引言
我國擁有18000多公里的海岸線和12.3萬公里的內河航運線,擁有龐大的船隊,船員個人的技術水平與管理能力是整個船隊實行正常營運和安全的基本保證。隨著科技技術的不斷進步,船舶自動化系統在安全性、可靠性、經濟性等綜合指標方面逐漸完善。如今,船舶自動化系統成為船員個人能力延伸的有效工具,尤其是機艙自動化。經過幾代技術發展,逐漸形成了各種手動、半自動、全自動的輪機設備的自動控制。因此船員操作船舶自動化系統需要的技能和知識要求是很高的,并且還在不斷的進步中,對船員培訓的工作越來越具有挑戰性。因此為了訓練船員在正常和緊急情況下對船舶主動力裝置系統的實際操作能力,培養學員對船舶主動力裝置系統的感性認識,許多航海院校建立了陸上輪機模擬器對學生進行模擬操作培訓,船公司也對新船員進行海上航行訓練[1]。
使用陸上輪機模擬器是一種有效提高船員專業技能的訓練手段,因其安全、經濟、可控、高效等獨特優勢一直以來都受到各國航運界人士的高度重視,取得了巨大的成功。它是利用計算機技術,模擬船舶動力裝置和控制系統的特性,設置各種工況和運行環境,進行操作和訓練。但是輪機模擬器只能在岸上進行,另外由于陸上的輪機模擬器和實際的船舶有差異。而海上航行訓練是在航行過程中,船員在實際的船舶環境中操作實際的船舶自動化系統和設備,可以邊工作邊學習。但是這種訓練不能提供故障的處理,訓練周期長,投入和風險大,不利于系統的學習[2]。
因此把這兩種訓練方式結合起來,優勢互補,在實船上建立一個綜合訓練環境——實船訓練系統。這一訓練方法綜合了以上2種訓練方式的優點,一是計算機模擬仿真系統能夠模擬航行情況和設置故障工況,二是實船訓練是在實際裝備上進行操作[2]。
本文提出一種基于xPC Target的實船訓練系統,將仿真模擬訓練系統嵌入到實際的船舶中,以實現對船員進行培訓的目的。
1 系統的總體結構
本研究的目的建立一套包含機-槳-船模型在內實船訓練系統,其首要功能是提供一個真實的訓練環境,使船員在平時工作環境中,學習主推進系統的各項操作和故障處理,使訓練好像在航行中實際操作一樣;并且也可以用來對主機遙控系統及集控室其他監控系統的性能進行監測。
1.1 系統整體結構框圖
該系統的整體框圖如圖1所示,虛線下部為實際的操縱手柄和監控設備,上部是柴油機硬件在環平臺。該平臺采用基于Matlab/xPC目標的雙機仿真結構,由監控計算機和實時仿真計算機組成。實時仿真計算機為xPC體系的目標機,運行動力裝置實時仿真程序;監控計算機一方面作為xPC體系的宿主機,另一方面也運行狀態監控程序。目標機和宿主機通過以太網通信。
目標機可通過數據采集板卡或CAN總線實現數據的輸入輸出。仿真系統計算的實時數據經過傳感器信號模擬器,轉換為實際船舶常用傳感器信號再輸出,特別是熱電偶和熱電阻信號,使仿真器能夠提供更真實的仿真環境。遙控系統的命令信號經過仿真系統內部的信號分配器,分別送入目標機和宿主機,控制仿真系統的運行并在監控系統中記錄。
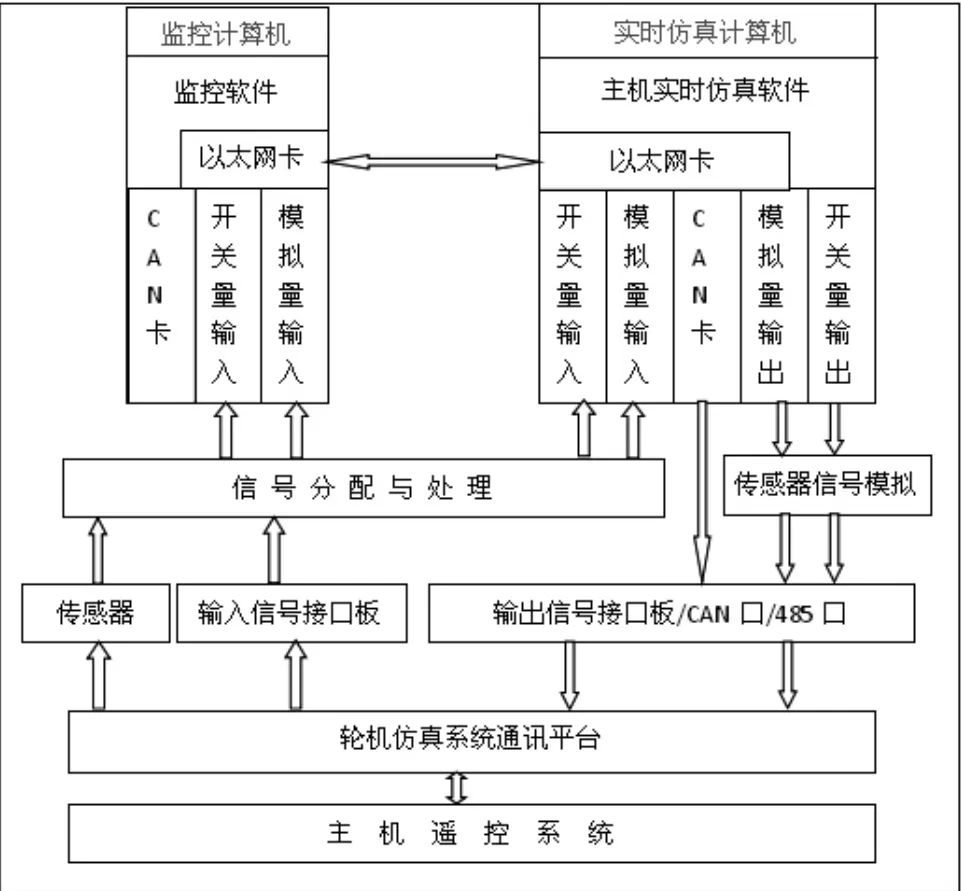
圖1 系統整體設計結構圖
1.2 xPC Target平臺
在實時仿真領域中,MATLAB/Simulink占有舉足輕重的地位,仿真模型建立和硬件在環仿真,都可以使用MATLAB來完成,形成了一整套的系統。xPC Target是Marh Works公司發行和提供的一個基于Real Time Workshop體系框架的附加產品,可將普通的PC機轉變為一個實時系統,并且支持許多類型的I/O設備板卡,例如數據采集卡,CAN通訊卡等。
采用Matlab xPC平臺構建實船訓練系統的優點:
(1)構建基于xPC的低成本硬件在環實時仿真系統,即節約成本也可以實現實時仿真的功能,在船舶動力裝置仿真中尚不多見。
(2)采用實際電路將計算得到的數據轉換為實際的傳感器信號,使仿真系統能夠為提供更真實的仿真環境。
(3)采用以太網和CAN總線通信,保證了仿真系統的先進性,并便于擴展以及和其他系統互連。
(4)可以利用Matlab命令行接口來修改參數,或通過Simulink外部模式來進行模型參數的調整。
(5)在仿真模型運行過程中可以信號進行監測、跟蹤和數據記錄,允許用戶捕獲、存儲和顯示突發數據,可以通過數據庫記錄可獲得整個程序執行期間的數據,采集到的信號數據可以上傳到主機,用戶可以進行分析和存檔。
(6)使用Simulink建模,因為Simulink是圖形界面,可以利用鼠標單擊和拖拉將模塊拖入到模型之中,因此建立仿真系統模型就像繪制系統的方框圖一樣,具有直觀、方便、更靈活的優點[3]。
1.3 輪機仿真系統通訊平臺
本研究建立的輪機系統仿真通訊平臺是一個混合P2P結構的通用型分布式仿真平臺。其功能是將做好的仿真模型嵌入到該平臺,通過以太網根據制定好的協議進行數據傳輸,從而達到快速的模擬器開發工作;該平臺可以實現仿真實時數據的同步傳輸;降低了服務器的重要性。
1.4 實船訓練系統的硬件設備
宿主機即教練機如圖1所示的監控計算機用來運行Simulink來對模型修改、搭建等操作以及對目標機進行監控,宿主機采用普通基于x86架構的PC即可。
目標機即仿真計算機如圖1所示的實時仿真計算機用來運行動態實時仿真模型和與主機遙控和監控系統完成數據交換。目標機采用工業控制機以滿足I/O接口數量的需求。
2 實船訓練系統的設計
2.1 實時動態仿真模型
柴油機模型采用容積法模型。由于大型低速主機都是直接可逆轉的,因此,所建模型必須包括啟動、制動、換向及反向啟動和反向運轉等工作過程;具有較好的實時性,在主流配置的PC機上滿足實時仿真要求,并在xPC目標中實現實時仿真。
建立與柴油機相匹配的定距螺旋槳的四象限運動模型,可計算船舶前進螺旋槳正轉、船舶前進螺旋槳逆轉、船舶倒退螺旋槳正轉、船舶倒退螺旋槳逆轉等四個象限中的螺旋槳推力和扭矩變化;與船舶運動模型相匹配,計算在船舶動態運動工況下螺旋槳的運動特性。
完成機-槳-船聯合仿真,考察在船舶在不同航行工況下,柴油機性能的變化,包括:轉速、扭矩、排溫、爆炸壓力、壓縮壓力、掃氣壓力、排氣壓力、透平轉速等多種性能參數。
傳統的岸上輪機模擬器中實時仿真系統模型一旦建好,就很難對其參數進行修改,但是在實際的船舶中隨著運營時間的增加,運行工況肯定會發生改變,因此實船訓練系統需要仿真模型跟實際設備具有一致的響應和信號,如果仿真系統模型改變的話,一定會與實際船舶設備有較大差異,失去了實船訓練的效果。因此,主動力實船訓練系統的仿真模型可以進行修改,及時修正系統的仿真模型,當處于實船訓練模式時,本研究利用修正過的系統模型模擬系統運行信號,獲得精確真實的訓練效果[4]。
2.2 接口設計與信號模擬
收集實際設備所需采集的信號(包括類型、數量、取值范圍等)以及所發出的命令的信號類型、數量、取值范圍等信息。這些信號信息需要多方調研,盡量多的包含現有遙控系統和監控系統所需的各種信號。根據這些信息并考慮一定的擴展能力,設計標準化的物理接口,提高系統的可用性。提供RS485和CAN總線,提高系統的通用性和可擴展性,也可以通過以太網與外界完成數據交換。
信號模擬主要是將模型解算出的數據轉換為相應的傳感器信號,特別是熱電阻和熱電偶信號模擬。
2.3 訓練內容設置和評估
實船訓練系統包括一系列的培訓課程內容要求。訓練課程可以調動船員訓練的學習興趣和積極性。對于熟練程度不同的學員,設置不同難度、不同范圍和的不同側重點訓練內容,為所有船員提供合適的訓練。訓練課程除包括正常操作訓練外,還包括對故障工況和異常工況的處理的訓練。如何更加科學地有效地設置訓練內容,是深入研究和探討。
實船訓練系統不僅可以正常運行、提供操作練習的輪機模擬器,它更加具備教學的功能。教學功能包括對訓練過程進行,對學員訓練情況進行評估,提供給學員反饋信息和如何改善訓練,記錄和分析訓練過程,保存個人和集體的訓練一記錄和訓練缺陷一記錄等。
實船訓練系統可以對船員的訓練進行評估,評估體系可以給出學員一個評定等級,可以使船員能夠根據自己所得的成績和評價,找出自己的不足和缺點以進行改進。當船員在訓練時出現嚴重錯誤,訓練評估系統可以發出警告和進行糾正,使學員不至于在錯誤中越走越遠。[5]
3 結束語
實船訓練系統相對于岸上輪機模擬器和海上航行訓練具有安全、經濟、訓練效率高等優點。本文利用Matlab—xPC實時仿真系統設計和構建了含有機-槳-船在內的一套實船訓練系統,充分利用xPC Target系統易于構建和Simulink建模方便的優點。由于時間倉促,個人的水平有限,對于該系統還在試驗階段,實驗結果需要更多的驗證。本研究存在一些不足之處:該實船訓練系統僅用于集控室和在內的監控系統,對于集控室外部自動化設備沒有進行互動。但是本研究可以為后續的實船訓練系統的開發提供借鑒意義。
[1]陸錦輝,張敏.主推進系統實船訓練系統的研究與實現[J].上海船舶運輸科學研究所學報,2006,29(1)∶6-13.
[2]華梅堂.STI-VC2100主動力裝置實船訓練系統實時性探討[J].上海船舶運輸科學研究所學報,2008,31(1)∶1-5.
[3]張永光.基于Xpc Target的發動機ECU硬件在環測試平臺的研究與開發[D].浙江大學,2011.
[4]謝寬,吳杰長,陳國鈞,等.基于 CompactRIO平臺的艦船實船訓練系統[J].機電工程,2013,30(4).
[5]王天昌.船舶主動力裝置訓練系統建模與仿真研究[J].大連∶大連海事大學,2008,1.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
