《自動控制原理(多學時)》課程中線性系統校正部分教學研究
2014-04-16 09:15:14劉桂濤白敬中
電腦與電信 2014年7期
劉桂濤白敬中
(1.湖北工程學院計算機與信息科學學院,湖北孝感432000;2.中國市政工程中南設計研究院,湖北武漢430010)
1.引言
《自動控制原理(多學時)》是自動化專業的一門重要專業主干課,該課程的特點是其理論廣、數學公式多、概念較難理解,具有一定的難度和復雜性,既與各專業前期相關的課程內容緊密相連,又與工程實踐緊密相結合[1],因此該課程具有一定的學習難度和教學難度。
在《自動控制原理(多學時)》的教學中,線性系統校正部分占有較大的比重,內容較多,難度較大。本文針對《自動控制原理(多學時)》線性系統校正部分的教學,總結教學中常出現的一些問題,并提出相應的解決辦法。
2.線性系統校正理論與實驗教學現狀
線性系統校正這部分內容用到了時域分析法、根軌跡法和頻率響應法中的知識,而且數學形式比較復雜,比較難掌握。《自動控制原理(多學時)》線性系統校正部分可能引起學生理解困難的幾方面問題如下:
(1)如何確定需校正系統的校正方式
當控制系統的性能指標不能滿足要求時,就需要在對控制系統進行校正,使校正后控制系統的性能指標全面滿足要求。但由于系統各不相同,性能指標要求的內容也不相同,加上學生沒有校正系統的實際經驗,造成學生面對各具體系統和具體性能指標要求時,不知道如何確定需校正系統的校正方式。
(2)未校正系統數學模型建立及簡化
每個系統都有其相應的數學模型,但對已有的系統確定其數學模型,則需要有比較深的數學知識和實際經驗,對本科階段的學生而言這兩方面都比較欠缺,大多數學生只能根據老師所講解的幾種系統數學建模方法去模仿相似系統的建模,而現實中系統各不相同,學生對不熟悉系統的數學建模多數會感到困難。另一方面,有的學生對系統建立了相應的數學模型,并求出了系統對應的傳遞函數,但不會對系統進行簡化,使得已經建立的數學模型比較復雜,給系統校正帶來許多額外工作。
(3)系統校正前后穿越頻率的求取
系統未校正前,要求出穿越頻率ωc,以便求出未校正系統的相位裕量γ,從而判斷未校正系統的相位裕量是否滿足要求,一般用近似方法求取,有些書籍上用MATLAB仿真求取,學生有時對近似法沒有理解透,所以用近似法求取的ωc往往不準確。系統校正后的穿越頻率ω'c求取沒有固定的方法,學生有時不知道如何求取系統校正后的穿越頻率ω'c。
(4)系統時域指標和頻域指標的對應關系[2]
系統校正的指標要求一般是頻域指標,有時還有時域指標,如果深入理解,還可以發現這些指標和根軌跡也有關系。例如二階系統時域指標超調量σ%和頻域指標相位裕量γ的間接關系有:100%,又如二階系統時域指標調節時間ts和頻域指標穿越頻率ωc、相位裕量γ的關系有因此,可以看出,要將系統時域指標和頻域指標對應關系弄清楚,需要學好時域分析法和頻域分析法的基本知識及相關的數學知識。
產生上述問題的原因有多個方面,主要的客觀原因有如下三點:①控制系統的校正除了要有較扎實的自動控制原理基本理論知識外,還需要有實際的工程校正經驗,在校學生一般是沒工程校正經驗,因此對給出的未校正系統和提出的性能指標要求,學生有時難以確定采用何種校正方式。②控制系統校正方式確定后,就需確定校正裝置的數學模型,由于建立校正裝置的數學模型較難,所以教材上一般直接給出校正裝置的數學模型,即它的傳遞函數,接下來如何確定校正裝置的傳遞函數,則需要對控制系統的傳遞函數和各項性能指標進行深入分析和繁瑣的數學推導,從面影響了學生對知識點的理解。③無論是教材中的校正舉例還是實驗中系統校正模擬,學生在接觸較少,使學生誤認為系統校正在實際生產和工作中沒有多大應用價值,造成對這一部分內容的學習興趣下降。
3.系統校正部分教學分析
對于上述教學中存在的問題,采用如下有針對性的教學方法進行改進。
(1)選擇恰當的校正方式
如果需校正系統的條件和提出的指標要求是時域范疇時,如穩態精度、系統響應時間等,則一般用時域法來校正系統;如果需校正系統的條件和提出的指標要求是頻率域范疇時,如相位裕量、速度誤差系數等,則一般用頻率域法來校正系統。
實際的系統校正一般采用頻率域法來校正系統,頻率域法校正又分串聯校正、反饋校正、前饋校正等多種校正方式,由于反饋校正和前饋校正需要有實際工程經驗,并且比較難和復雜,故在課堂教學中只作簡要介紹。串聯校正根據情況不同還可分為超前校正、滯后校正、滯后—超前校正三種,至于采用何種串聯校正,則需根據已知系統的條件和提出的指標要求來確定。
(2)突出重點
系統校正的方式多,每一種校正方式又相當復雜,若逐一進行理論和舉例講解,不僅學時有限,而且學生的注意力可能會平均分散,不易抓住重點[3]。在教授系統校正時結合自動化特點和專業背景,在教學大綱的基礎上對教學內容進行合理組織和優化,突出重點。
在控制系統校正講解中,不介紹基于根軌跡的系統時域法校正,對于頻率域法中的前饋校正和反饋校正也只作大體介紹。重點講解頻率域法中的串聯校正,無論是串聯超前校正、串聯滯后校正,還是串聯滯后—超前校正,都要重點講解校正裝置的傳遞函數及頻率特性、系統校正的步驟、系統校正的具體舉例,一定既讓學生理解和掌握,又讓學生理論聯系實際。
(3)舉工程實例
《自動控制原理(多學時)》課程與工程實際緊密相連,其系統校正部分內容和工程實際聯系相當緊密,同時系統校正部分內容的理論性強,若在教學過程中強調其邏輯性及理論體系,而不和工程實例相結合,將會使其成為高深難懂的內容,學生的學習興趣就會下降。在重點講解串聯校正后,便以轉速、電流雙閉環調速系統為工程實例,由淺入深地講述系統數學模型的建立和簡化,調節器結構的選擇和參數的確定,這樣有助于學生在具體工程實例中理解串聯校正,將理論和實踐的內容融會貫通。
4.教學實踐
下面以串聯超前校正為例[4],講述控制系統校正教學的三步驟。
4.1 講解理論知識
首先舉出一個超前校正裝置的實際模型圖,由模型圖得出它的傳遞函數,其中α>1,并畫出其伯德圖(圖1):
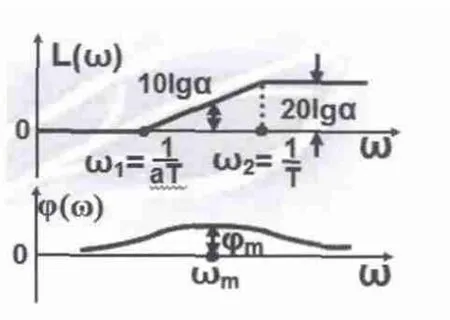
圖1 串聯超前校正裝置伯德圖
由圖可知:在ω=ωm處出現了最大超前相角。
由校正裝置的傳遞函數得到相應的頻率特性表達式,進而畫出其奈奎斯特曲線圖(圖2):
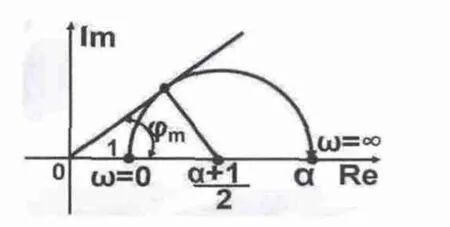
圖2 串聯超前校正裝置奈奎斯特曲線圖
從奈奎斯特曲線圖可知最大超前相角即為原點到曲線的切線與正實軸的夾角φm,并由圖中幾何關系可得到如下式子:
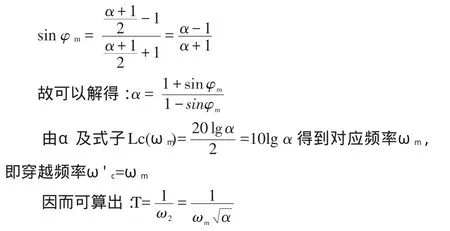
由得到的α,T,就能確定串聯超前校正傳遞函數了。
4.2 舉具體的例子
設某負反饋系統開環傳遞函數為,且H0(s)=1,試設計一個校正裝置,使校正后系統速度誤差系數Kv=100,相位裕度γ≥450。
解:(1)分析給定的系統和所要求的指標,選取合適的校正方式。
由于系統本身的相位裕量不大,但所要求的相位裕量較大,且穩定性能指標要求不高,故選取串聯超前校正方式。
(2)確定系統的參數K0。

(3)系統校正前的伯德圖L0(ω)和φ0(ω)(圖3)。

圖3 系統的校正前后及校正裝置伯德圖
相應地,其相位裕量為:

(4)確定最大超前相位角φm。

(5)計算校正裝置參數α的值。

(6)在L0(ω)上找到幅值為-10lgα的點所對應的頻率ωm,即校正后系統的穿越頻率ω’c=ωm。解得:ωm=ω’c=40

(7)確定校正裝置參數T及其傳遞函數。
相應地校正后系統的開環傳遞函數為:

(8)畫出校正后系統的伯德圖(見圖3),系統校正后相位裕量γ'=450滿足要求。
4.3模擬實驗
(1)在模擬實驗箱上連接還未校正的二階系統的模擬電路(圖4),并用數字示波器觀測其穩態性能和動態性能(圖5)。
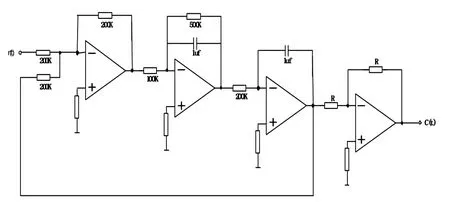
圖4 校正前二階閉環系統模擬電路圖
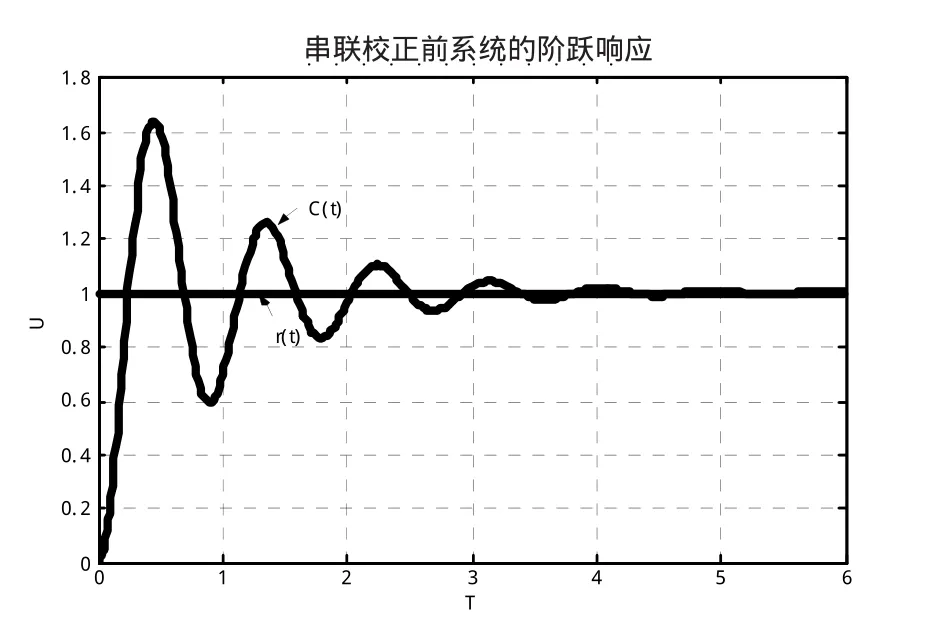
圖5 校正前二階系統階躍輸入響應圖
(2)按給定的性能指標要求,確定串聯校正裝置傳遞函數,進而確定校正后的模擬電路(圖6)。
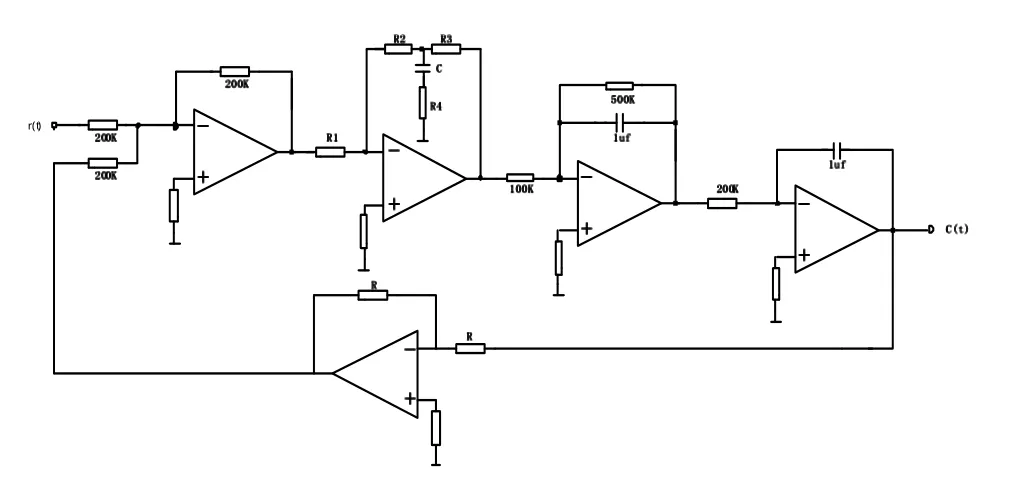
圖6 校正后二階閉環系統模擬電路圖
(3)在模擬實驗箱上連接加入校正裝置后的模擬電路,并用數字示波器觀測其穩態性能和動態性能(圖7)。
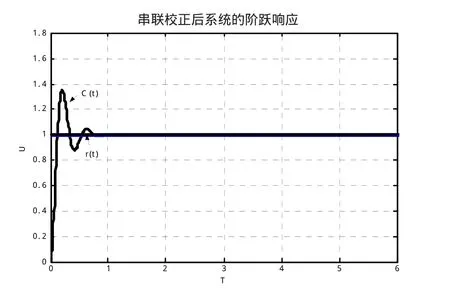
圖7 校正后二階系統階躍輸入響應圖
(4)改變校正裝置參數,對加校正后的系統進行調試,使校正后系統滿足性能指標要求。
通過實驗,使學生明白了系統加串聯校正裝置后能改變系統性能,并掌握了如何對系統進行串聯校正。
5.結束語
雖然控制系統校正教學中存在一些問題,但通過對產生問題的原因進行分析以及采取了相應的教學實踐措施,激發了學生的學習興趣,提高了學生對控制系統進行校正的能力。通過近幾年的教學實施效果及學生的反饋調查,《自動控制原理(多學時)》課程中線性系統校正教學取得了良好的教學效果。
[1]高春艷,龐靖等.“自動控制原理”教學改革關鍵問題探索[J].中國電力教育,2013,(13):79-80.
[2]胡壽松.自動控制原理(第六版)[M].北京:科學出版社,2013.
[3]丁世宏,楊年法等.“自動控制原理”課程的頻域部分教學探討[J].電氣電子教學學報,2012,(3):106-108.
[4]黃堅.自動控制原理及其應用(第2版)[M].北京:高等教育出版社,2009.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:50
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
東方教育(2017年19期)2017-12-05 15:14:48
家庭影院技術(2017年9期)2017-09-26 03:41:45
唐山文學(2016年2期)2017-01-15 14:03:59
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
