交直流輪對電機跑合試驗臺控制系統設計
2014-04-16 02:38:22張春紅
電氣傳動自動化 2014年2期
張春紅
(江蘇聯合職業技術學院 常州鐵道分院,江蘇 常州 213011)
1 概述
輪對是車輛行走的重要部件。輪對電機總成作為機車轉向架上最重要的組成部分,由車軸、輪對、牽引電機、齒輪箱、軸承等組成。其性能直接決定了機車以及機車后方運行列車的安全。在轉向架總組裝之前要對機車輪對電機總成進行跑合試驗,跑合試驗有以下功能:①軸箱勻脂;②齒輪箱齒輪磨合;③測試牽引電機軸承溫升值、振動值;④測試輪對軸承溫升值、振動值;⑤測試齒輪箱溫升值、振動值;⑥測試輪對實時轉速;
通過以上參數的采集測量,判斷機車輪對內部齒輪以及軸承的安裝是否正常,是否符合安裝要求。
2 系統總體設計思路
試驗臺設計考慮到效率問題,將臺位設計為三工位,可以進行單軸試驗,也可同時三軸試驗。系統框圖如圖1所示。三相交流電源經變頻器和直流驅動器后,輸出的電壓驅動輪對電機旋轉。輪對跑合過程中,采用工控機作為輸入、輸出控制和數據處理的核心單元。工控機采集的輸入信號有轉速信號(每軸1路))、振動信號((每軸6路))、溫度信號(每軸6路)。同時工控機輸出模擬量調節信號,控制電機自動調速功能。
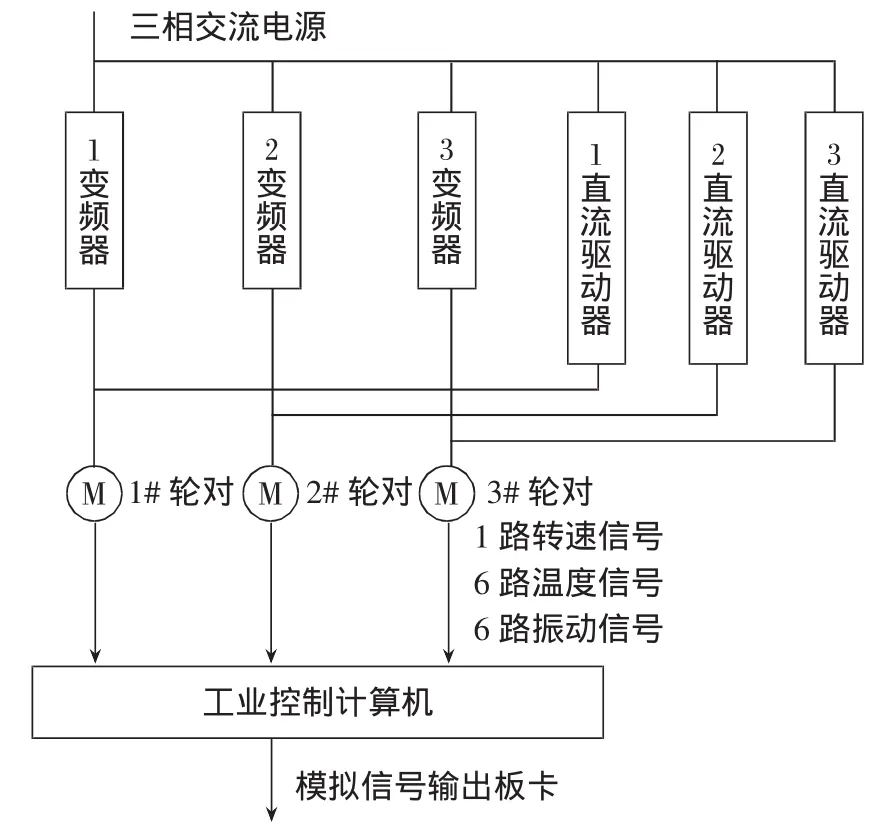
圖1 系統框圖
3 數據采集系統
數據采集,是指從傳感器和其它待測設備等模擬和數字被測單元中自動采集信息的過程。數據采集系統整合了信號、傳感器、激勵器、信號調理、數據采集設備和應用軟件。下面以振動信號采集系統為例進行介紹。
對于沖擊和振動信號的獲取,最常見的是用壓電加速度傳感器。該傳感器最主要的權衡因素是重量、頻率響應和靈敏度。選擇內裝微型IC放大器的LC0156T壓電加速度傳感器。內裝IC需要恒流源供電,典型值為24VDC、4mA,并不是電子儀器通常具備的恒壓源供電。需要對信號調理而設計,選擇LC0212信號調理器,其電路如圖2所示。

圖2 LC0156T與LC0212原理圖
調理后的振動模擬信號并不能直接通過儀表或通信接口被計算機所接受。需要對數據進行采集,這里采用數據采集模塊方式。采集模塊根據傳感信號類型和傳感器區域分布情況設置多個采集模塊來實現不同數據的采集,各個采集模塊通過主通信模塊與計算機相連,組成分布式的數據采集系統。振動信號采集模塊選用ADAM-4017+。ADAM-4017+是16位A/D 8通道的模擬量輸入模塊,可以采集電壓、電流等模擬量輸入信號。其方案電路如圖3所示。
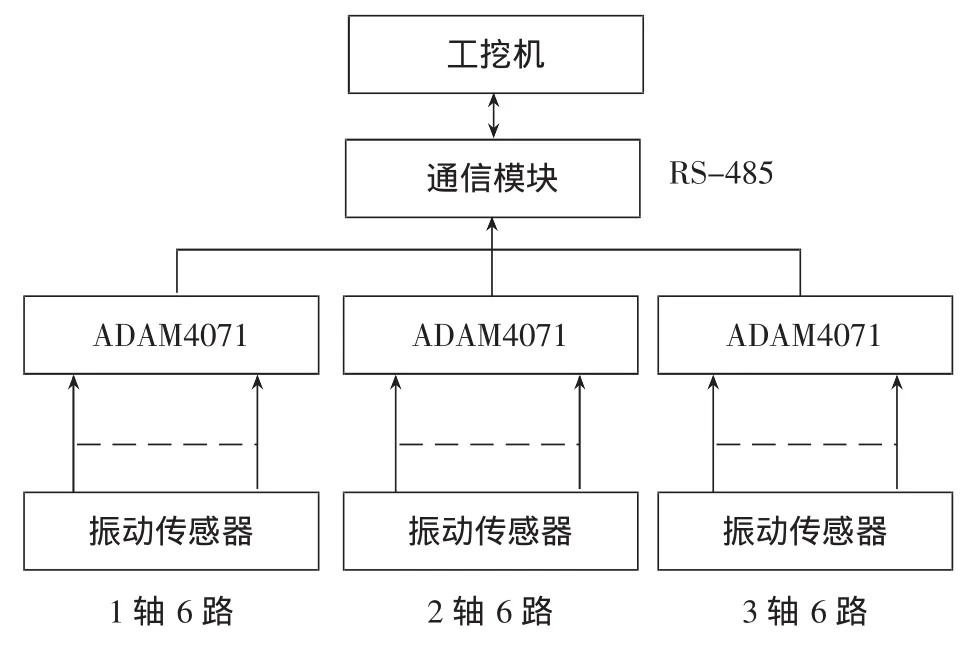
圖3 振動數據采集模塊方案
4 交直流傳動系統
對于交直流傳動系統設計,首要考慮的問題是空載跑合,元件功率的選擇,既要求保證能夠驅動設備達到穩定運行要求的水平,同時不造成功率浪費。總體技術參數如下。
工作電源:3相380V交流;工作環境溫度:-10℃~43℃;抗震等級:Ⅵ;
輸出直流電壓DC0~300V;輸出直流電流DC0~300A;3組;
輸出交流電壓AC0~400V;輸出交流電流AC0~205A;輸出交流輸出功率110k W;頻率0~180Hz;3組;
方案設計中交流傳動系統采用變頻器、直流傳動系統采用直流調速裝置,同時需要PLC配合控制兩傳動系統的手動和自動兩種模式。
4.1 變頻器設計
機車整個傳動屬于恒轉矩負載。恒轉矩負載就是在負載一定的情況下負載阻轉矩不變,在負載變化時其轉矩仍然是隨負載變化的。從理想的角度來說,對于恒轉矩類負載或有較高靜態轉速精度要求的機械應采用具有轉矩控制功能的高性能變頻器6SE6440。
以HXN5牽引電機型號5GEB32B1為例,其額定電壓626V(基波有效值),額定電流760A(基波有效值)。由于電機近似空載運行,實際工作中將它設在AC380V電壓等級上。輪對電機空載運行時,定子三相繞組中通過的電流是空載電流。一般大中型電動機的空載電流約為額定電流的20%-40%。如空載電流選額定電流的40%,即I空=0.4×760A=304A,選300A。因此電機空載運行的功率是P=1.732×U×I×cosφ,其中cosφ為功率因數,是0到1之間的數值,電動機一般為0.75到0.85,即P=1.732×380×300×0.75=148086W。為了不浪費功率,推定變頻器功率110k W可以滿足。變頻器作為交流牽引電機試驗的電源,需要設置參數,涉及參數有命令參數組(CDS),以及與電機、負載相關的驅動參數組(DDS)。
4.2 直流調速裝置設計
由于直流電氣傳動技術已比較成熟,尤其是全數字直流系統的出現,更提高了直流調速系統的精度及可靠性。特別是當前現場總線技術在工業領域的普及和發展,就更加確立了數字控制的主導地位。選擇6RA70系列調速裝置為三相交流電源直接供電的全數字晶閘管整流控制裝置,由可控的電樞、勵磁晶閘管整流模塊及全數字調節系統組成。
由于直流牽引電機為串勵電機,為了使跑合試驗環境與實際環境更相近,試驗中直流電機也采用串勵供電方式。電機的正反向運轉是通過接觸器換向,改變勵磁回路的正反極性。為了達到更高的精度,通過調節以下系統參數。由于直流牽引電機各自參數都不一樣。所以在設這些參數的時候往往選大一點數值。6RA70主要參數設置如下:P083=2(速度實際值由脈沖編碼器提供);P140=1(脈沖編碼器類型);P141=1024(脈沖數/轉);P142=1(15V信號電壓);P143=3000最大運行速度(轉/分);P051=25(開始 電樞和勵磁的預控制以及電流調節器的優化運行);P051=26(開始 速度調節器的優化運行)。
5 智能測控系統
測控系統采用工控機IPC-610H,配上串口通訊卡PCI1622cu,可以采集來自現場的各路信號,包括電壓、電流、轉速、溫度、振動加速度等。所有現場信號均通過RS485通訊方式,其優點是接線簡單,信號線屏蔽抗干擾能力強。
5.1 測控系統工程組態
隨著工業控制要求的不斷提高,專門用于工業控制的組態軟件應運而生。MCGS(Monitorand ControlGenerated System,監視與控制通用系統)是用于快速構造和生成上位機監控系統的組態軟件系統,主要完成現場數據的采集與監測、前端數據的處理與控制。
以運行策略為例,運行策略使系統能夠按照設定的順序和條件操作實時數據庫,控制各用戶窗口的打開、關閉以及設備構件的工作狀態,以及通過編程可達到較復雜的控制要求。數據采集循環腳本程序如下。
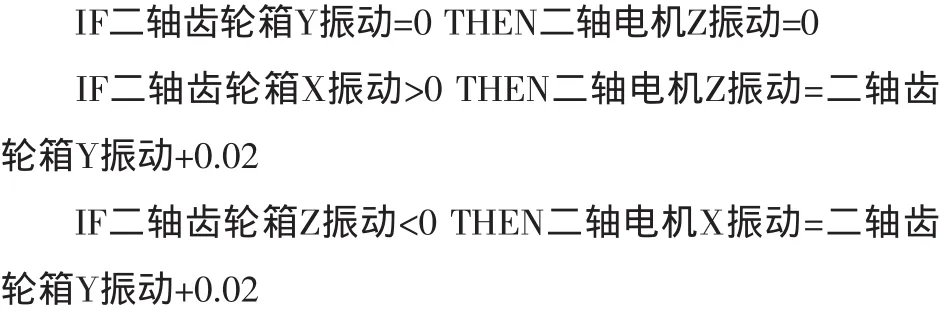
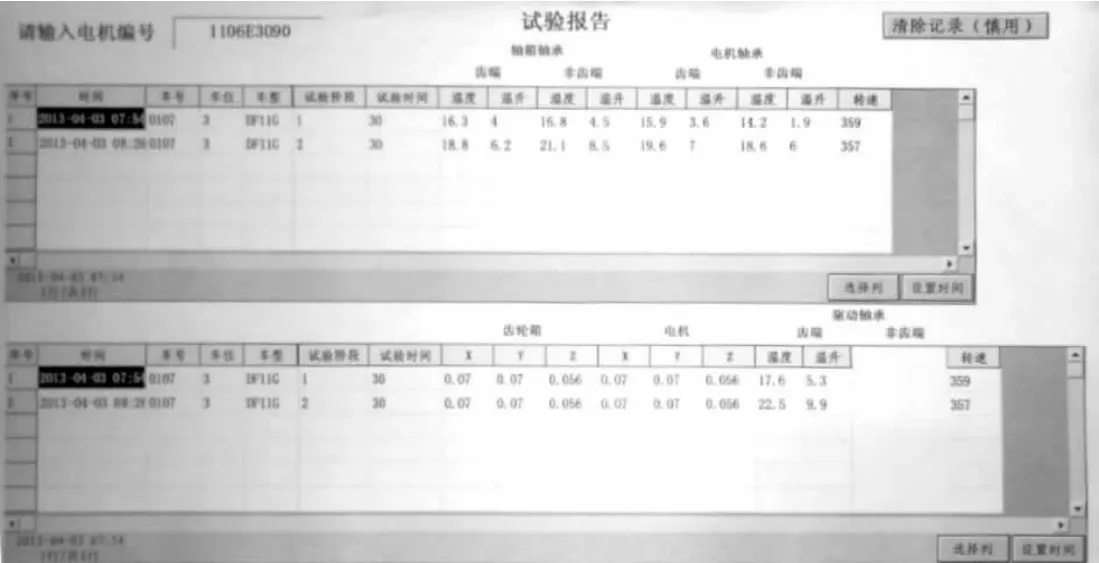
圖4 DF11G機車電機編號1106E3090跑合數據
5.2 控制系統調試與運行
在完成軟件組態、設備連接、PLC程序設計以后,可以進行試驗的組態監控。利用MCGS強大的組態功能,可以進行數據顯示、保存、計算處理,以及將數據轉換為最為直觀的曲線圖。圖4所示是DF11G機車電機編號是1106E3090跑合數據。
利用MCGS軟件運行環境實現上下位機之間的數據傳輸,從而實現了管理層對設備層的實時監控。實踐證明整個數據采集非常順暢,能滿足各種工況試驗需求公司反映良好。
6 結束語
機車輪對電機跑合試驗臺交付運行已有半年多,運行狀況正常。滿足了DF系列內燃機車/SS系列電力機車/HXN5交流傳動機車/DF8CJ等機車。本裝置具有良好的人機交互界面,操作通用性好,節省了大量的人力物力,創造了良好經濟效益。
[1]生春林.輪對電機跑合試驗裝置的電氣系統設計[J].內燃機車,2012,(5).
[2]劉喜梅.輪對跑合試驗臺計算機測控系統的研究與研發[J].鐵路計算機應用,2009,(1).
[3]崔曉軍,姚衛東,楊清泉.利用西門子數字直流調速裝置改造龍門刨床[J].裝備維修技術,2002,(4).
[4]肖英輝,任惠英,孫 棟.變頻調速在牽引機車中的應用[J].煤礦機械,2007,(9).
[5]張福學.實用傳感器手冊[M].北京:電子工業出版社,2005.
[6]袁秀英.組態控制技術[M].北京:電子工業出版社,2003.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45