基于多基線干涉儀和多波束比幅聯合測向天線系統的設計與實現
2014-04-26 06:09:26李東海
艦船電子對抗
2014年2期
李東海,柯 凱
(解放軍91404部隊,秦皇島 066001)
0 引 言
目前,船用雷達偵察裝備可以選擇的測向體制主要有搜索式測向、多波束比幅、相位干涉儀、數字相控陣、時差法等。
多波束比幅測向法技術成熟,難度小,瞬時帶寬寬,截獲概率高,不依賴于測頻,成本較低;但是其測向精度對天線的幅度方向圖特性和通道之間的幅度平衡特性依賴性較大,測向精度很難做得很高,就8~18GHz頻段八比幅測向而言,難以滿足1.5°(rms)的測向精度要求[1-2]。
相位干涉儀測向法相對容易達到較高的測向精度,但是它對通道之間的相位一致性要求較高,而且與測頻精度有關。最主要的問題是干涉儀測向還存在相位模糊問題,為了消除相位模糊和兼顧測向精度,需要采用多重測量或其他處理方法。本文提出一種3基線干涉儀測向保精度、八比幅測向解模糊的方法,僅供參考[3]。
1 干涉儀測向原理
干涉儀測向的原理示意圖見圖1。
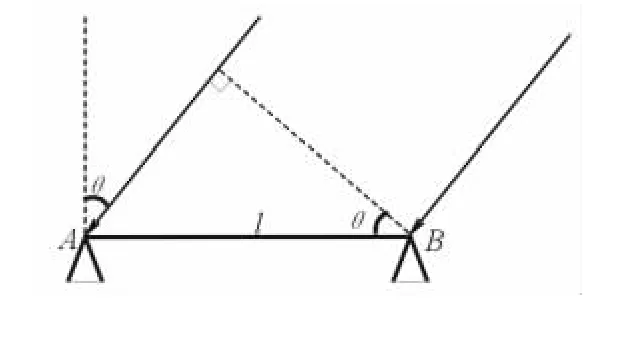
圖1 干涉儀測向原理示意圖
由圖1可知:

式中:φ為兩天線接收同一信號的相位差;λ為輻射源的信號波長;θ為信號的到達角(相對于基線的法線夾角);l為兩天線之間的基線長度。
由式(1)知:由于基線長度l是已知的,只要測得信號的相位差φ和信號波長λ即可得到信號到達角。
2 干涉儀測向誤差分析
對式(1)進行微分可以得到測向誤差估算公式:

式中:Δθ為角度測量誤差;Δφ為相位測量誤差;Δλ為載頻測量誤差;Δl為基線長度誤差。
首先僅考慮測頻誤差引起的測向誤差,即:

假設測角范圍限制在 ±π/3范圍內,設θ=π/3,f=8 000MHz,Δf=15MHz,計算得 Δθ=0.18°,影響較小,可以忽略不計。……
登錄APP查看全文