永磁同步電機位置伺服系統滑模控制的研究
2014-04-27 08:44:38孫路路王玲麗
科技視界 2014年8期
孫路路 王玲麗
(安徽工程大學 電氣工程學院,安徽 蕪湖241000)
0 引言
工業對象的多樣化和復雜化對伺服控制器提出了更高要求,即希望伺服系統具有一定的自適應能力和較強的抗擾能力,滑模變結構控制(SMC)能較好地解決這個問題[1]。SMC是50年代俄羅斯學者提出的一種有效的非線性魯棒控制方法[2]。由于它不需要對系統的精確觀測,控制率整定方法簡單,易于數字實現,近年來,已有學者將SMC應用于伺服系統中,研究表明,它能有效改善摩擦非線性和負載時變性,提高系統魯棒性[3-4]。
本文根據矢量控制PMSM伺服系統的特點,設計了一種SMC控制器,通過對控制量先微分后積分的處理,使其不含非線性項,減小了抖振;通過對伺服系統采取先速度SMC后位置SMC的方式,實現了位置跟蹤和速度控制。文中將該方法應用于矢量控制PMSM伺服系統,仿真和實驗結果均表明所設計的SMC控制器能使實際系統較好地實現位置跟蹤和速度控制,較大地提高系統的快速性和魯棒性,并減小抖振,有效地改善電機的動靜態特性。
1 永磁同步電機數學模型
假設磁路不飽和,在空間磁場呈正弦分布,不計磁滯和渦流損耗影響條件下,采用id=0的PMSM轉子磁場定向控制,轉矩的大小只與定子電流的幅值成正比,實現了PMSM的解耦控制。這時,PMSM電壓方程:
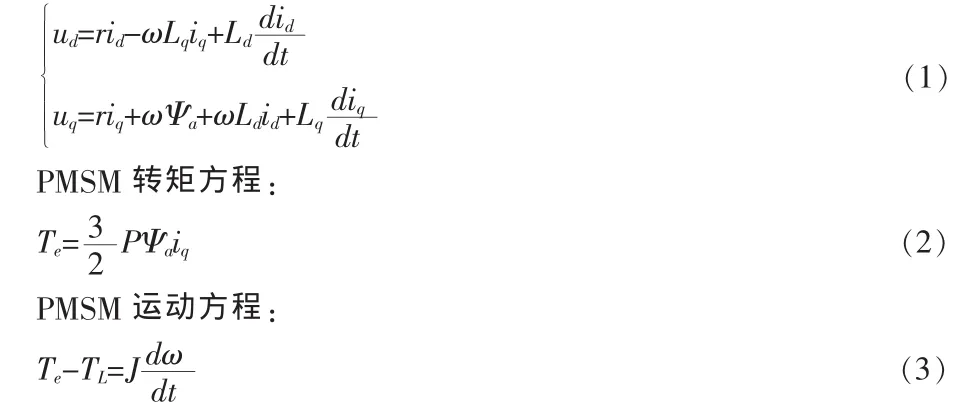
式中:ud、uq分別為 d、q 軸電壓;id、iq分別為 d、q 軸電流;Ld、Lq分別為 d、q軸電感;r為定子電阻;Te為電磁轉矩;P為電機的極對數;Ψa為永磁體與定子交鏈的磁鏈;TL為負載轉矩;J為轉動慣量;ω為轉子機械角速度。
2 控制器的設計
伺服系統采用圖1所示的控制方案,用SMC代替傳統P與PI的雙環控制。
SMC是基于相平面的控制,如圖2示。其基本思想是將任一點出發的狀態軌跡通過控制作用引導到滑模面(階段a),同時保證系統在滑模面上的運動是漸近穩定的,即為滑動模態(階段b)。
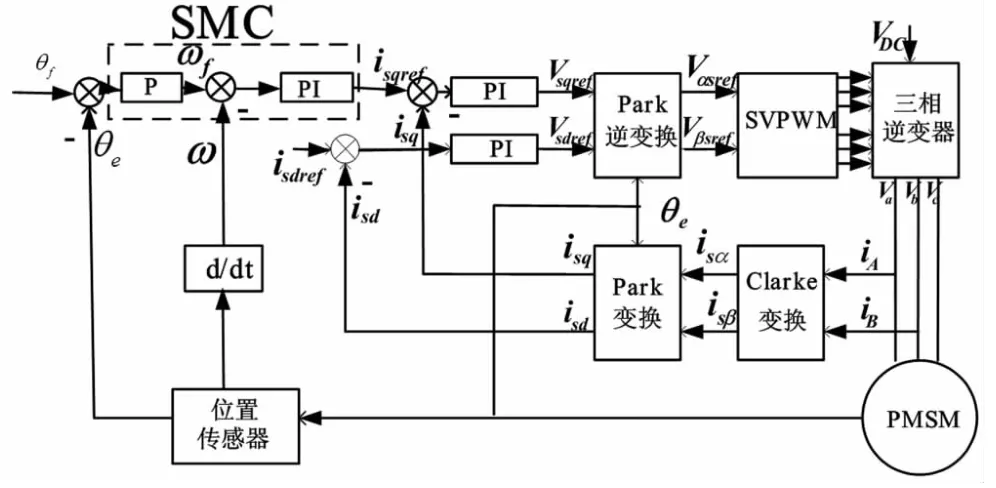
圖1 伺服系統框圖Fig.1 The structure of servo control system
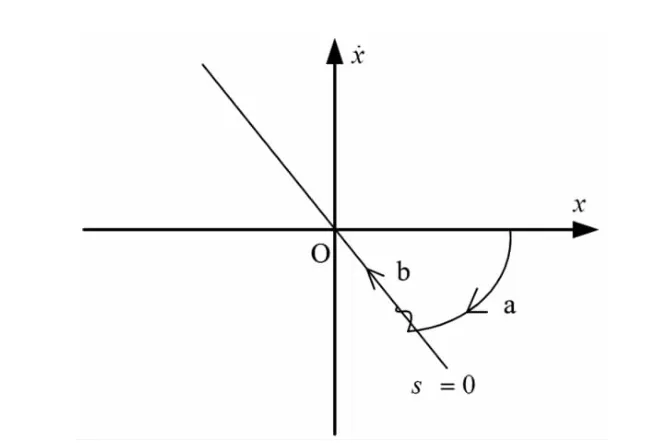
圖2 SMC系統相平面軌跡Fig.2 The phase trace of SMC system
對系統位置采取SMC控制,取系統狀態變量:
設計切換函數:

則由SMC到達條件 ss˙<0得:

圖4是在給定角度200°時,采用位置SMC的仿真波形。可見,系統最終能無超調地達到穩定。
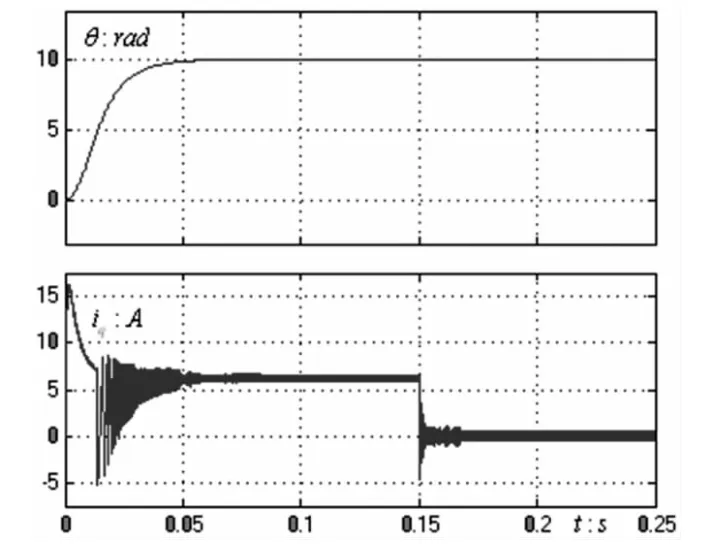
圖3 突卸負載iq和位置誤差波形
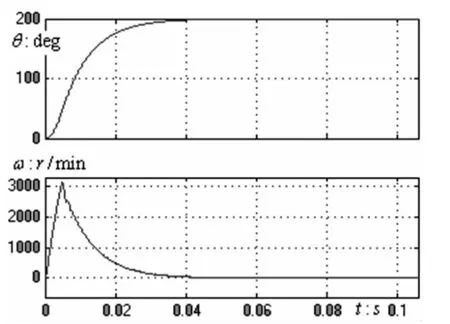
圖4 伺服系統位置和速度波形
3 結論
本文針對矢量控制的PMSM伺服系統的特點,設計了一種SMC控制器,仿真表明,所設計的SMC控制器能有效實現PMSM速度和位置伺服。
[1]Kuo-Kai Shyu,Chiu-Keng Lai,Yao-Wen Tsai,,and Ding-I Yang.A Newly Robust Controller Design for the Position Control of Permanent-Magnet Synchronous Motor[J].IEEE Transaction on Industrial Electronics,2002,49(3):558-565.
[2]葛寶明,鄭瓊林,蔣靜坪,于學海.基于離散時間趨近率控制與內模控制的永磁同步電動機傳動系統[J].中國電機工程學報,2004,24(11):106-111.
[3]張希,陳宗祥,潘俊民,王杰.永磁直線同步電機的固定邊界層滑模控制[J].中國電機工程學報,2006,26(22):115-121.
[4]劉云峰,繆棟.電液伺服系統的自適應模糊滑模控制研究[J].中國電機工程學報,2006,26(14):140-144.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17