行星光學遠程著陸模擬器光學系統設計
2014-04-30 03:41:28喬彥峰
中國光學 2014年6期
唐 杰,蔡 盛,喬彥峰
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
行星光學遠程著陸模擬器光學系統設計
唐 杰*,蔡 盛,喬彥峰
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
為了實現對行星光學遠程著陸過程的光學模擬以及滿足行星光學遠程著陸系統導航算法的地面測試需求,提出了以商用投影儀顯示系統為基礎的模擬器光學系統方案,重點闡述了系統的光學設計思想,并給出了設計結果。首先,介紹了模擬器的工作原理和系統組成,在此基礎上,由技術要求及所選擇的投影儀和CCD參數確定了投影鏡頭和成像鏡頭的光學系統指標,最后給出了投影鏡頭、成像鏡頭及系統對接的光學結構圖,像差曲線、點列圖和MTF曲線圖。仿真分析結果表明:系統的點列圖中的彌散斑對稱性都很好,有利于模擬器系統的后續圖像處理和判讀,同時系統在Nyquist頻率(91 lp/mm)處的MTF設計值接近0.6,系統整體成像性能良好。設計結果可作為研制行星光學遠程著陸模擬器系統的基礎。
模擬器;光學系統設計;光學遠程著陸
1 引言
隨著人類社會經濟的不斷發展和科學技術的進步,深空探測已成為空間科學研究的重要內容,行星探測則是目前深空探測所關注的重點,一直受到各國家和航天機構的支持,行星探測的次數和任務規劃相比于其它深空探測的對象也是最多的。早期行星探測的主要方式是飛越和繞飛,隨著技術進步以及為了對目標行星進行實地考察和采樣,著陸方式的行星探測已成為主要探測方式選擇。
由于目標行星與地球的距離遙遠,導致地面測控站所發出的測控信息的傳輸出現大時滯,難以實現對著陸過程進行實時測控。同時,由于存在初始確定誤差以及慣性測量單元常值漂移偏差,采用慣導單元的導航方式存在累計誤差無界的缺陷,最終帶來落點偏差過大的結果(落點誤差橢圓半徑均在100~300 km的量級),很難滿足未來行星表面精確著陸任務的需求。因此,有必要發展新一代的基于光學測量的高度自主導航與制導技術來實現行星表面精確著陸[1-4]。
在基于光學測量的高度自主導航與制導技術的研究過程中,為保證光學遠程著陸系統的整體性能,必須對各項指標進行詳細而準確的測試和驗證,受到測試條件以及測試手段的限制,常規地面測試只能對成像系統的技術指標、性能進行簡單的測試,若想對成像效果以及算法進行測試需要提供目標的動態圖像,即利用“星模擬器”對“星敏感器”在地面進行檢測標定。關于星敏感器及星模擬器的研究在國內開展的較為廣泛,目前主要集中在如何實現大視場星敏感器及高精度地面標定技術,采用新型光源的星模擬器等方面[5-14]。為實現對光學遠程自主著陸系統的模擬并進行算法驗證,本文采用了一種以商用投影儀顯示系統為核心部件的模擬器方案,根據模擬器的特點設計了一種透射式投影鏡頭,其出瞳位于光學系統的外部,出射光線為平行光出射,以方便與相應的成像鏡頭光學對接,系統光譜范圍為可見光。
2 工作原理
行星光學遠程著陸模擬器主要由圖像模擬生成系統和圖像接收處理系統組成(見圖1),其中圖像模擬生成系統擬在成熟的商用投影儀基礎上,采用重新設計的投影鏡頭,以數字微鏡陣列(Digital Micro-mirror Device,DMD)作為動態景象生成器,將其投影到無窮遠處,即模擬無窮遠目標(遠程著陸)。圖像接收系統利用成像鏡頭對圖像模擬生成系統形成的模擬目標進行成像,通過CCD采集和圖像采集卡將圖像存儲在PC機上,并進行解算。
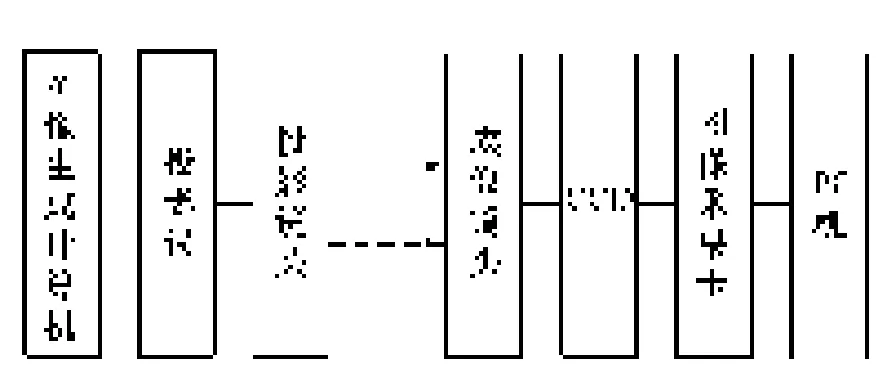
圖1 系統組成Fig.1 Components of system
3 技術要求及指標分析
3.1 技術要求
行星光學遠程著陸模擬器系統的設計原則實現對行星遠程自主著陸過程進行模擬,重點是能夠實現對自主著陸導航算法進行驗證。根據行星光學遠程自主著陸系統的規劃,對模擬器系統的主要要求如下:
(1)模擬器系統畸變測試優于千分之一;
(2)行星著陸遠程光學環境成像分辨率不小于1 024×1 024;
(3)探測目標星等優于5等星;
(4)遠程光學環境圖像分辨率不小于1 280× 768;
(5)遠程光學環境圖像對比度不小于5 000∶1;
(6)行星遠程著陸光學模擬設備通光孔徑不小于直徑60 mm。
3.2 指標分析
為滿足3.1中(4)和(5)的要求,選用優派投影儀7820HD,其標配鏡頭和DMD參數如下:
(1)焦距(實測值):19.2~25.7 mm;
(2)F數:2~2.57;
(3)鏡頭安裝基面距DMD距離(實測):37 mm;
(4)型號:0.65”LVDS S600 1080p;
(5)分辨率:1 920×1 080;
(6)像元大小:7.5 μm;
(7)偏移量:120%。
根據3.2中(2)的要求,選擇的CCD相機參數如下:
(1)像元大小:5.5 μm;
(2)分辨率:1 024×1 024;
(3)接口類型:C口。
根據所選擇的投影儀和CCD相關參數,以及3.2中(6)的要求,可以確定投影鏡頭的主要光學系統參數如下:
(1)入瞳直徑:60 mm;
(2)焦距:150 mm;
(3)視場:像高大于12 mm;
(4)后工作距BFL:大于40 mm。
其中視場的確定依據是DMD的大小及偏置放置,如圖2所示,由于DMD是偏置放置,同時考慮到投影鏡頭的安裝方便,將投影鏡頭的視場范圍規劃為以投影儀標配鏡頭的中心,即O點為軸上點,投影儀的視場可由式(1)計算得到。
此時,可將投影鏡頭整體傾斜一定角度來實現成像鏡頭與投影鏡頭的對接,相應的成像鏡頭的設計參數如下:

圖2 DMD偏置示意圖Fig.2 Schematic diagram of offset of DMD
(1)入瞳直徑:40 mm;
(2)焦距:110 mm;
(3)視場:像高大于2.816 mm;
(4)后工作距BFL:大于17.526 mm。
4 光學設計結果
4.1 投影鏡頭
根據上述投影鏡頭的主要光學系統參數,選擇雙高斯為基本結構型式[15-17],考慮到方便和成像鏡頭的光學對接,將標準雙高斯的光闌位置由中間調整到最前面,這樣就破壞了雙高斯鏡頭原有的對稱性,為了有利于像差的校正,加入了兩個單片,最終的光學結構圖如圖3所示。

圖3 投影鏡頭光學結構圖Fig.3 Optical system of projective lens
圖4為投影鏡頭的像差曲線,球差和軸向色差都不大,1.0視場以內的像散和場曲都很小,全視場基本無畸變。
圖5為投影鏡頭的光學傳遞函數(MTF)曲線,計算的波長為486.1、587.6、656.3 nm,權重1∶1∶1,空間頻率0~70 lp/mm,設計值接近衍射極限。圖6為系統的點列圖,0.85視場內星點的形狀對稱性都很好。
圖4 投影鏡頭像差曲線Fig.4 Aberration curves of projective lens
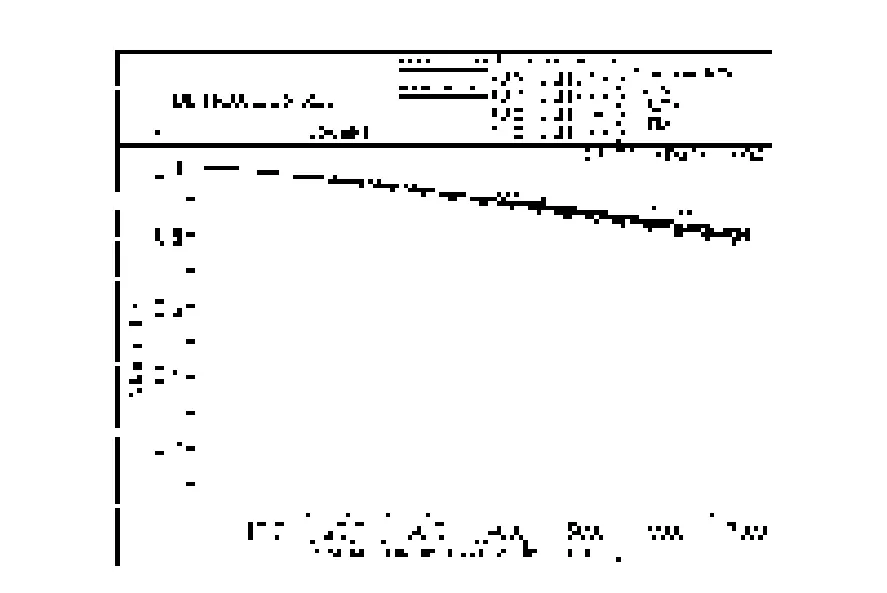
圖5 投影鏡頭光學傳遞函數曲線圖Fig.5 Modulation transfer function curves of projective lens
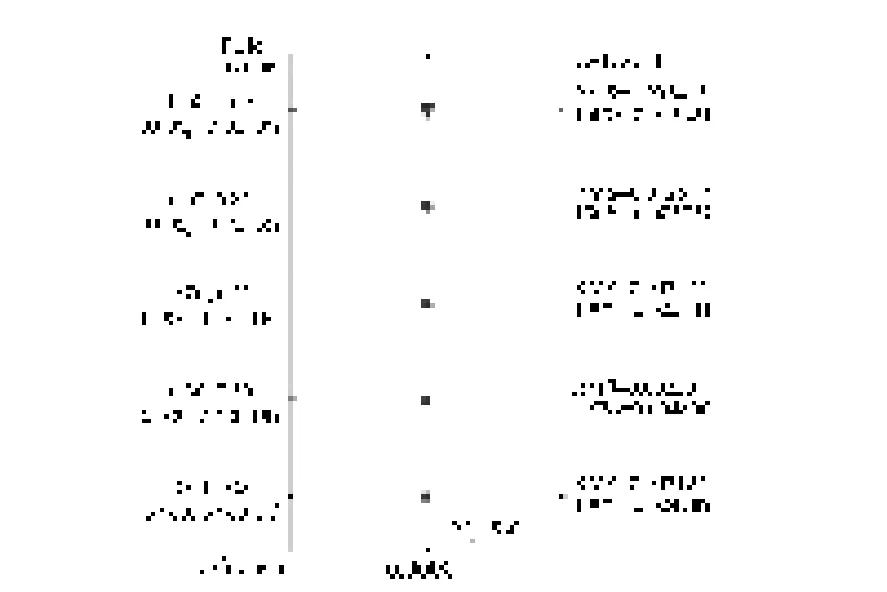
圖6 投影鏡頭點列圖Fig.6 Spot diagram of projective lens
4.2 成像鏡頭
成像鏡頭選擇與投影鏡頭類似的結構型式,由于它的視場較投影鏡頭要小,在雙高斯結構的基礎上只增加了1個單片就實現了像差的校正,系統結構圖如圖7所示。
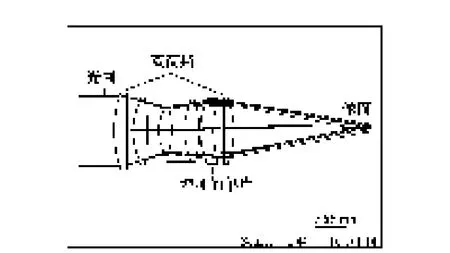
圖7 成像鏡頭光學結構圖Fig.7 Optical system of imaging lens
圖8為成像鏡頭的像差曲線,球差和軸向色差都不大,1.0視場以內的像散和場曲都很小,全視場基本無畸變。
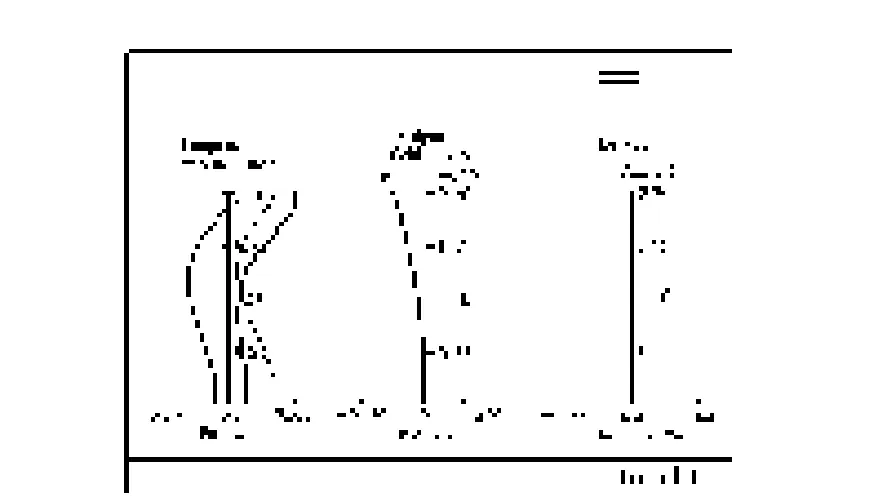
圖8 成像鏡頭像差曲線Fig.8 Aberration curves of imaging lens
圖9為成像鏡頭的MTF曲線,計算的波長同投影鏡頭,空間頻率0~100 lp/mm,MTF值均在0.6以上。圖10為系統的點列圖,1.0視場內星點的形狀對稱性都很好。
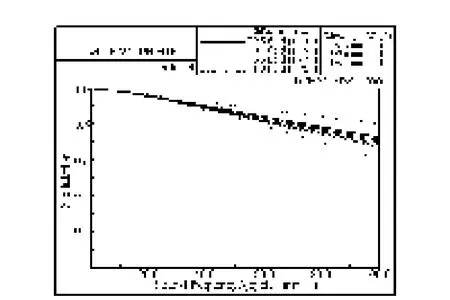
圖9 成像鏡頭光學傳遞函數曲線圖Fig.9 Modulation transfer function curves of imaging lens

圖10 成像鏡頭點列圖Fig.10 Spot diagram of imaging lens
4.3 投影鏡頭與成像鏡頭對接
根據3.2中的分析,由于DMD的偏置,為了實現成像鏡頭整體傾斜2.085°,實際上DMD的分辨率大于模擬器系統要求的環境圖像分辨率,該傾斜角度可隨著實際使用的DMD區域進行微調,從而實現CCD像素點與DMD像素點的一一對應。整個模擬器光學系統圖如圖11所示。
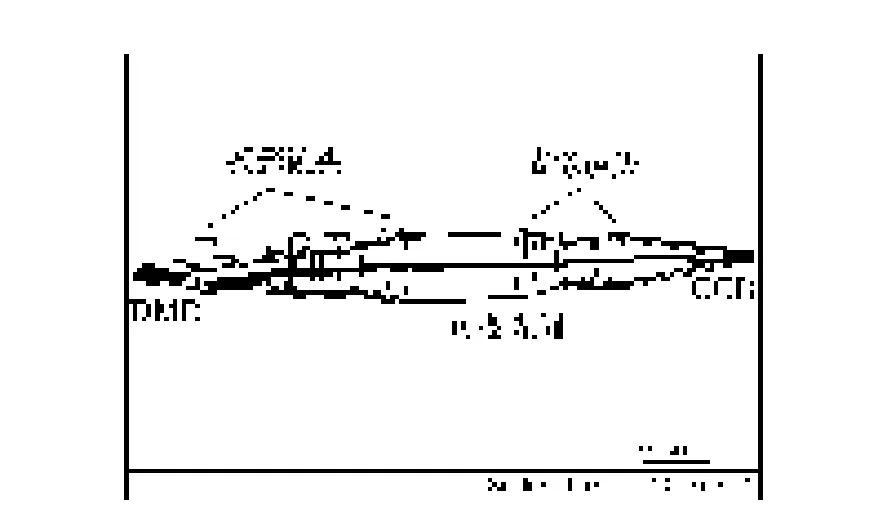
圖11 模擬器光學系統圖Fig.11 Optical system of simulator
圖12為模擬器系統的MTF曲線,計算的波長同投影鏡頭,空間頻率0~100 lp/mm,MTF值均在0.5以上。圖13為系統的點列圖,視場內星點的形狀對稱性都很好,有利于后續圖像處理。并且光線追跡結果表明,由DMD發出的圖像成像在CCD上的實際位置與理想位置最大偏離量為3.8 μm,小于1個像素,相對畸變小于1%,滿足3.1中(1)的要求。

圖12 模擬器光學傳遞函數曲線圖Fig.12 Modulation transfer function curves of simulator

圖13 系統點列圖Fig.13 Spot diagram of simulator
5 結論
本文以實現行星光學遠程著陸模擬為出發點,介紹了模擬器的工作原理,提出了以商用投影儀顯示系統為基礎的模擬器光學系統方案,分析了系統技術要求并進行光學系統指標分析,給出了投影鏡頭、成像鏡頭及系統對接的光學結構圖,像差曲線、點列圖和MTF曲線圖表明,模擬器光學系統的光學性能良好,模擬器系統在Nyquist頻率處91 lp/mm的MTF設計值接近0.6,設計結果可作為研制行星光學遠程著陸模擬器系統的基礎。
[1]李爽.基于光學測量的相對導航方法及在星際著陸中的應用研究[D].哈爾濱:哈爾濱工業大學,2007.
LI SH.Study on optical measurement based relative navigation and its application in planetary landing[D].Harbin:Harbin Institute of Technology,2007.(in Chinese)
[2]高艾.基于光學信息的行星自主著陸魯棒估計與制導方法研究[D].哈爾濱:哈爾濱工業大學,2012.
GAO A.Study on robust estimation and guidance for autonomous landing on planets based on optical navigation[D].Harbin:Harbin Institute of Technology,2012.(in Chinese)
[3]王維,董吉洪,孟慶宇.火星探測可見光遙感相機的發展現狀與趨勢[J].中國光學,2014,7(2):208-214.
WANG W,DONG J H,MENG Q Y.Current status and developing tendency of visible spectral remote sensing camera for mars observation[J].Chinese Optics,2014,7(2):208-214.(in Chinese)
[4]馬鵬斌,寶音賀西,沐俊山.利用火星衛星光學測量實現火星探測器自主導航[J].光學精密工程,2014,22(4):863-869.
MA P B,BAOYIN H X,MU J SH.Autonomous navigation of Mars probe based on optical observation of Martian moon[J].Opt.Precision Eng.,2014,22(4):863-869.(in Chinese)
[5]呂偉振,劉偉奇,魏忠倫.大屏幕投影顯示光學系統的超薄化設計[J].光學精密工程,2014,22(8):2020-2025.
LYU W ZH,LIU W Q,WEI ZH L.Design of ultra-thin optical systems in large screen projection display[J].Opt.Precision Eng.,2014,22(8):2020-2025.(in Chinese)
[6]魏忠倫,劉偉奇,柳華.動態目標模擬器用視景仿真鏡頭光學設計[J].應用光學,2013,34(1):26-31.
WEI ZH L,LIU W Q,LIU H.Optical design of visual simulation lens for dynamic target simulator[J].J.Applied Optics,2013,34(1):26-31.(in Chinese)
[7]呂銀環,張濤,童廣輝.大視場可見光目標模擬器光學系統設計[J].光電工程,2012,39(6):85-90.
LU Y H,ZHANG T,TONG G H.An optical system design with a large-field visible light target simulator[J].Opto-Electronic Engineering,2012,39(6):85-90.(in Chinese)
[8]陳啟蒙,張國玉,王哲,等.大視場高精度靜態星模擬器的光學系統設計[J].激光與光電子學進展,2014,51(5):052202.
CHEN Q M,ZHANG G Y,WANG ZH,et al..Optical system design of high-precision static star simulator with large field of view[J].Laser Optoelectronics Progress,2014,51(5):052202.(in Chinese)
[9]李璟,楊寶喜,胡中華,等.星敏感器光學系統的研制與性能測試[J].光學學報,2013,33(5):0522005.
LI J,YANG B X,HU ZH H,et al..Development and performance testing of optical system for star sensor[J].Acta Optica Sinica,2013,33(5):0522005.(in Chinese)
[10]孫高飛,張國玉,高玉軍,等.星敏感器地面標定設備的設計[J].紅外與激光工程,2013,42(10):2822-2827.
SUN G F,ZHANG G Y,GAO Y J,et al..Design of star sensor ground calibration equipment[J].Infrared and Laser Eng.,2013,42(5):2822-2827.(in Chinese)
[11]陳啟夢,張國玉,王凌云,等.高精度星敏感器測試設備的設計[J].紅外與激光工程,2014,43(7):2234-2239.
CHEN Q M,ZHANG G Y,WANG L Y,et al..Test equipment design of high precision star sensor[J].Infrared and Laser Engineering,2014,43(7):2234-2239.(in Chinese)
[12]馬強,張濤.星等及光譜可調的標定用單星模擬器系統設計[J].應用光學,2014,35(1):38-42.
MA Q,ZHANG T.Single star simulator with adjustable magnitude and spectrum for calibration[J].J Applied Optics,2014,35(1):38-42.(in Chinese)
[13]賀鵬舉,梁斌,張濤,等.大視場星敏感器標定技術研究[J].光學學報,2011,31(10):1023001.
HE P J,LIANG B,ZHANG T,et al..Calibraiton method for wide field of view star sensor[J].Acta Optica Sinica,2011,31(10):1023001.(in Chinese)
[14]胡文剛,元雄,何永強,等.基于DMD中波紅外場景仿真系統光源溫度的研究[J].紅外技術,2014,36(8):661-664.
HU W G,YUAN Y,HE Y Q,et al..Research on light source temperature-scope in the mid-wave infrared scene simulation system based on DMD[J].Infrared Technology,2014,36(8):661-664.(in Chinese)
[15]張樹青,王敬洋,王冶樂,等.紅外多目標復合仿真光學系統設計[J].光學精密工程,2014,22(6):1454-1460.
ZHANG SH Q,WANG J Y,WANG Y L,et al..Design of infrared optical system for mulit-target compounded simulator[J].Opt.Precision Eng.,2014,22(6):1454-1460.(in Chinese)
[16]李航,顏昌翔.800萬像素手機廣角鏡頭設計[J].中國光學,2014,7(3):456-461.
LI H,YAN CH X.Design of wide-angle lens for 8 mega-pixel mobile phone camera[J].Chinese Optics,2014,7(3):456-461.(in Chinese)
[17]史光輝,楊威.用于圖像拼接的電視攝像光學系統[J].中國光學,2014,7(4):638-643.
SHI G H,YANG W.Optical system used to compose images in television photograph[J].Chinese Optics,2014,7(4):638-643.(in Chinese)
[18]胡際先,黨晨郎.兩檔變焦測量電視光學系統的設計[J].光學與光電技術,2013,12(6):93-96.
HU J X,DANG CH L.Design of Swith-Zoom TV measuring optical system[J].Optics Optoelectronic Technology,2013,12(6):93-96.(in Chinese)
Optical system design of simulator for autonomous landing on planets based on optical navigation
TANG Jie*,CAI Sheng,QIAO Yan-feng
(Changchun Institute of Optics Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
In order to realize the simulation of autonomous landing on planets based on optical navigation and to satisfy the need of ground-based testing for system navigation algorithms,a scheme of simulator based on commercial projector′s projection system is suggested.The idea of optical system design are described especially and the design results are given.First,the working principle and components of system are introduced. Then the optical specifications of projective lens and imaging lens are fixed based on the simulator′s technology demands,projector and CCD selected.Finally,the optical system layouts,aberration curves,spot diagrams and modulation transfer functions(MTF)are showed.Simulation results indicate that the symmetry of spot diagrams is well to satisfy the demand of image processing and judgments,and the design value of MTF is close to 0.6 at the Nyquist frequency(91 lp/mm)and the imaging performance of system is good.The design results can be used for the following manufacture of simulator for autonomous landing on planets based on opticalnavigation.
simulator;optical system design;autonomous landing based on optical navigation
V448.22;TP394.1;TH703
A
10.3788/CO.20140706.0962
2095-1531(2014)06-0962-07

唐 杰(1964—),男,吉林長春人,研究員,主要從事光電測量技術方面的研究。E-mail:13943196096@139.com

蔡 盛(1983—),男,湖北武穴人,博士,副研究員,主要從事光電測量及靶場光學成像測量方面的研究。E-mail:cais-ciomp@hotmail.com

喬彥峰(1962—),男,吉林長春人,研究員,主要從事光電測量技術方面的研究。E-mail:qiaoyf@ciomp.ac.cn
2014-08-21;
2014-10-19
國家重點基礎研究發展計劃(973計劃)資助項目(No.2012CB720000)
*Corresponding author,E-mail:13943196096@139.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17