一種踝關(guān)節(jié)康復(fù)裝置的設(shè)計(jì)
2014-05-03 03:30:10吳俊鵬李日輝李雅寧高金武蔣樂(lè)倫
中國(guó)醫(yī)療設(shè)備 2014年3期
吳俊鵬,李日輝,李雅寧,高金武,蔣樂(lè)倫
中山大學(xué) 工學(xué)院,廣東 廣州 511400
一種踝關(guān)節(jié)康復(fù)裝置的設(shè)計(jì)
吳俊鵬,李日輝,李雅寧,高金武,蔣樂(lè)倫
中山大學(xué) 工學(xué)院,廣東 廣州 511400
本文介紹一種踝關(guān)節(jié)康復(fù)裝置,主要從足底壓力檢測(cè)單元和電機(jī)控制單元兩部分來(lái)介紹裝置的硬件組成與設(shè)計(jì)。采集單元采集控制需要的各項(xiàng)參數(shù)給控制器,構(gòu)成一個(gè)閉環(huán)控制系統(tǒng),使得裝置能按照預(yù)先設(shè)定好的康復(fù)模式帶動(dòng)足部進(jìn)行康復(fù)訓(xùn)練,達(dá)到控制病患踝關(guān)節(jié)進(jìn)行康復(fù)訓(xùn)練的目的。
踝關(guān)節(jié)康復(fù)裝置;足底壓力檢測(cè)單元;電機(jī)控制單元;康復(fù)模式
0 前言
踝關(guān)節(jié)扭傷是日常生活中常見(jiàn)的運(yùn)動(dòng)傷,踝關(guān)節(jié)損傷如果治療不及時(shí)或者不徹底,容易導(dǎo)致踝關(guān)節(jié)韌帶恢復(fù)不了原來(lái)的狀態(tài),使關(guān)節(jié)不穩(wěn)定,易引起反復(fù)扭傷,甚至產(chǎn)生后遺癥,情況嚴(yán)重的有可能影響行正常行走功能[1]。
目前,在國(guó)內(nèi)關(guān)于踝關(guān)節(jié)的康復(fù)治療中,依舊以治療師的手工輔助康復(fù)為主,而使用踝關(guān)節(jié)康復(fù)裝置來(lái)替代治療師對(duì)患者實(shí)施被動(dòng)運(yùn)動(dòng)訓(xùn)練,對(duì)減輕治療師的人工勞動(dòng)強(qiáng)度、及時(shí)使患者踝關(guān)節(jié)運(yùn)動(dòng)幅度和能力得到保持和恢復(fù)有重要意義[2]。在當(dāng)前市場(chǎng)或醫(yī)學(xué)上用于踝關(guān)節(jié)康復(fù)訓(xùn)練或治療的設(shè)備中,主要包括簡(jiǎn)單材料和復(fù)雜儀器兩種。簡(jiǎn)單材料如彈力繃帶和泡沫塑料等輕型材料,其使用方便,價(jià)格較低,但康復(fù)的效果非常有限;復(fù)雜儀器如Biodex4多關(guān)節(jié)系統(tǒng)等,但系統(tǒng)針對(duì)性不強(qiáng),且價(jià)格昂貴[3]。而足部矯形器主要用于預(yù)防運(yùn)動(dòng)損傷,維持足部的形態(tài),保護(hù)關(guān)節(jié)[4],但對(duì)踝關(guān)節(jié)康復(fù)訓(xùn)練的針對(duì)性不強(qiáng)。
本文設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置是專門針對(duì)需要通過(guò)康復(fù)運(yùn)動(dòng)訓(xùn)練來(lái)恢復(fù)踝關(guān)節(jié)運(yùn)動(dòng)功能的患者而設(shè)計(jì)的,使用者的足部能夠在裝置的帶動(dòng)下,按照預(yù)先設(shè)定好的康復(fù)程序,進(jìn)行單自由度(繞踝關(guān)節(jié)矢狀面)康復(fù)訓(xùn)練。
1 踝關(guān)節(jié)生理特性簡(jiǎn)介
人體踝關(guān)節(jié)的運(yùn)動(dòng)能圍繞3個(gè)互相垂直的軸心,沿三個(gè)互相垂直的平面的轉(zhuǎn)動(dòng)運(yùn)動(dòng),如圖1所示[5]。
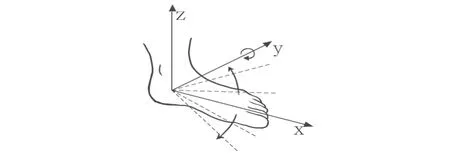
圖1 踝關(guān)節(jié)運(yùn)動(dòng)
本文設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置只涉及踝關(guān)節(jié)單自由度的運(yùn)動(dòng),即為圖1中繞y軸轉(zhuǎn)動(dòng)的自由度。
人體踝關(guān)節(jié)的運(yùn)動(dòng)幅度有一定范圍,因此裝置進(jìn)行康復(fù)訓(xùn)練的運(yùn)動(dòng)幅度必須在一定范圍之內(nèi),否則容易引起使用者足部肌肉的拉傷甚至帶來(lái)骨損傷。若以地面為零參考,在矢狀面內(nèi)足部運(yùn)動(dòng)的范圍大約為-30°~30°[5],所以康復(fù)裝置只能在該范圍內(nèi)轉(zhuǎn)動(dòng)。
人體踝關(guān)節(jié)運(yùn)動(dòng)的速度也有極限。踝關(guān)節(jié)角速度最大值為262.36°/s,最小值-343.01°/s[6],若康復(fù)訓(xùn)練過(guò)程中,裝置帶動(dòng)足部的轉(zhuǎn)速過(guò)高,會(huì)給使用者的足部肌肉、韌帶等帶來(lái)一定傷害。而裝置帶動(dòng)足部轉(zhuǎn)速過(guò)低,又不能滿足人體康復(fù)訓(xùn)練的要求。所以康復(fù)裝置的轉(zhuǎn)速必須符合人體生理要求。
另外,研究表明,踝關(guān)節(jié)背屈峰力矩最大值約為30 Nm[6],而在康復(fù)訓(xùn)練中,裝置遇到的踝關(guān)節(jié)的力矩會(huì)略小于該值,但力矩也必須滿足在任何情況下都能夠帶動(dòng)足部運(yùn)動(dòng)的約束條件。
2 踝關(guān)節(jié)康復(fù)裝置的設(shè)計(jì)與控制
根據(jù)現(xiàn)有研究成果[7],設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置有2種運(yùn)行模式:被動(dòng)模式和半被動(dòng)模式。所謂被動(dòng)模式就是使用者的足部完全在裝置的帶動(dòng)下進(jìn)行踝關(guān)節(jié)康復(fù)訓(xùn)練,治療師只需預(yù)先設(shè)定好裝置擺動(dòng)的各項(xiàng)參數(shù)范圍(如定時(shí),定量、定速、定范圍等),即可讓使用者進(jìn)行單一不變的機(jī)械康復(fù)訓(xùn)練。半被動(dòng)模式就是裝置在預(yù)先設(shè)定好的各項(xiàng)康復(fù)參數(shù)下工作,運(yùn)行過(guò)程中裝置可實(shí)時(shí)檢測(cè)出足部的運(yùn)動(dòng)狀況和受力情況,根據(jù)這些信息動(dòng)態(tài)調(diào)節(jié)各項(xiàng)康復(fù)參數(shù),以分析出更適合使用者的各項(xiàng)參數(shù)范圍。此模式適合第一次使用該康復(fù)裝置或者需要制定新的康復(fù)訓(xùn)練計(jì)劃的人。裝置運(yùn)行模式的選擇可手動(dòng)輸入至控制器,并由控制器執(zhí)行。
為完成上述功能,設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置包括永磁直流力矩電機(jī)、電機(jī)控制單元、足部機(jī)械裝置、足底壓力檢測(cè)單元、采集單元及控制器。裝置總體的結(jié)構(gòu)框圖如圖2所示。
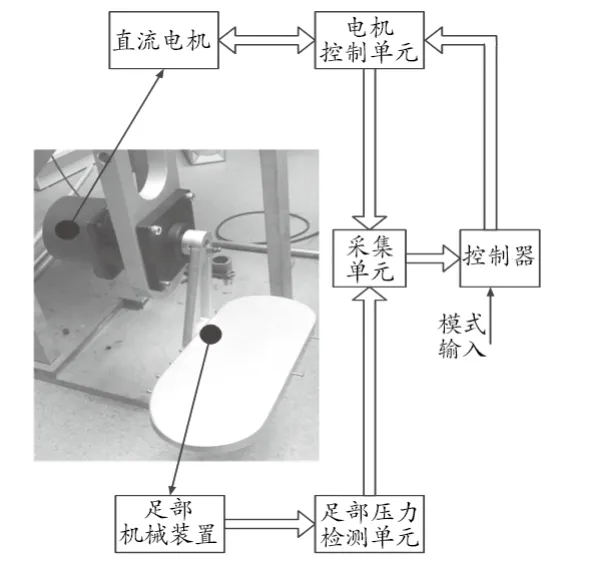
圖2 踝關(guān)節(jié)康復(fù)裝置總體結(jié)構(gòu)
采集單元分別采集來(lái)自足底壓力檢測(cè)單元和電機(jī)控制單元的參數(shù)信息,并將信息傳送給控制器,控制器再根據(jù)輸入模式的選擇、通過(guò)電機(jī)控制單元控制電機(jī)運(yùn)轉(zhuǎn)。其中足底壓力檢測(cè)單元檢測(cè)安裝在足部機(jī)械裝置上的薄膜壓力傳感器的壓力信息,電機(jī)控制單元通過(guò)檢測(cè)與電機(jī)相關(guān)的電流、轉(zhuǎn)速信息實(shí)現(xiàn)電機(jī)的轉(zhuǎn)速、位置以及力矩控制。
2.1 足部壓力檢測(cè)單元
在半被動(dòng)模式中,需要根據(jù)人體足底的運(yùn)動(dòng)狀況來(lái)動(dòng)態(tài)調(diào)節(jié)裝置運(yùn)行參數(shù),而人體足部的運(yùn)動(dòng)狀況由足底壓力檢測(cè)單元采集壓力信息,返回給控制器進(jìn)行判斷。足底壓力檢測(cè)單元主要由多個(gè)薄膜式壓力傳感器組成,結(jié)構(gòu)框圖如圖3所示。
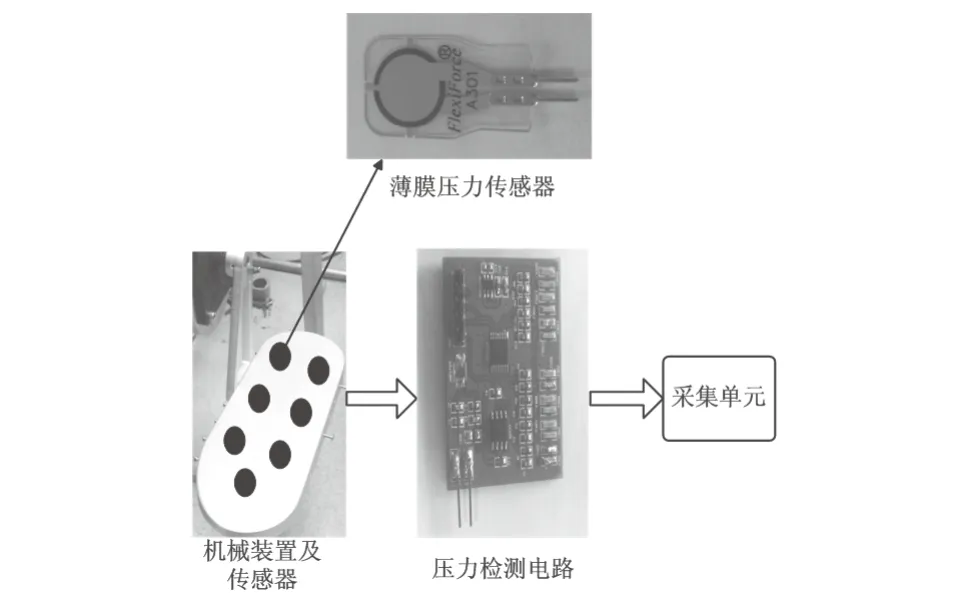
圖3 足底壓力檢測(cè)單元結(jié)構(gòu)框圖
所采用的薄膜式壓力傳感器厚度極小,置于裝置底部時(shí),使用者基本不能感知它的存在,且對(duì)力的分辨率達(dá)到±0.5%。傳感器阻值與作用的壓力大小呈線性關(guān)系[8]。壓力檢測(cè)電路對(duì)每個(gè)傳感器采用電壓分壓原理,測(cè)量傳感器在不同受力情況下的電壓大小,由分壓公式:
可求得與每個(gè)傳感器與壓力相關(guān)的電壓大小,其中RFSR為傳感器電阻值。采集單元通過(guò)多路復(fù)用芯片,對(duì)各個(gè)傳感器進(jìn)行電壓數(shù)據(jù)采集。基于該策略,傳感器反映的與壓力相關(guān)的電壓數(shù)據(jù),被傳送到控制器里進(jìn)行分析處理。在控制程序里,為每個(gè)位置的壓力傳感器的采樣數(shù)值設(shè)定一個(gè)閾值,當(dāng)采集到該位置的傳感器數(shù)值超過(guò)設(shè)定的閾值,則認(rèn)為足底在該位置與裝置發(fā)生了明顯壓力行為,否則認(rèn)為沒(méi)有明顯接觸。通過(guò)組合所有位置的壓力傳感器的量值信息來(lái)判斷足部的運(yùn)動(dòng)情況,控制器再根據(jù)判斷的結(jié)果實(shí)時(shí)動(dòng)態(tài)地調(diào)整控制裝置的運(yùn)行參數(shù)。
2.2 電機(jī)及電機(jī)控制單元
根據(jù)以上人體踝關(guān)節(jié)生理信息的分析,設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置選用永磁直流力矩電機(jī),其峰值堵轉(zhuǎn)電壓和電流分別為27 V和7.4 A,峰值堵轉(zhuǎn)轉(zhuǎn)矩達(dá)到28.8 Nm,足以在康復(fù)訓(xùn)練中帶動(dòng)和制止踝關(guān)節(jié)運(yùn)動(dòng)[7],最大空載轉(zhuǎn)速經(jīng)減速器減速后約為1 r/s,即360°/s,滿足踝關(guān)節(jié)最大角速度[6]。
電機(jī)控制單元由PHB光電編碼器、電機(jī)電流檢測(cè)電路、H橋控制電路組成,結(jié)構(gòu)框圖如圖4所示:
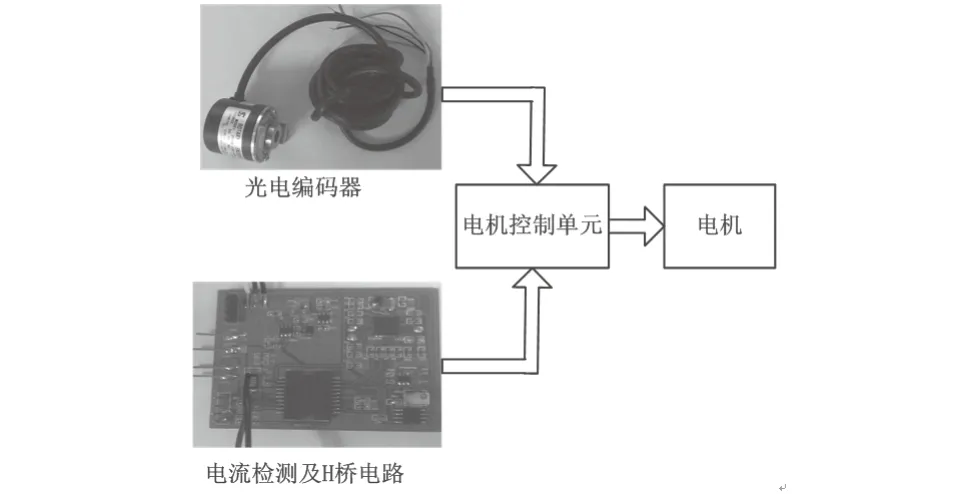
圖4 電機(jī)控制單元結(jié)構(gòu)框圖
光電編碼器的作用是檢測(cè)直流電機(jī)的轉(zhuǎn)速和位置。PHB增量式光電編碼器安裝在電機(jī)后方轉(zhuǎn)軸上,直流電機(jī)每轉(zhuǎn)動(dòng)一周,編碼器產(chǎn)生200個(gè)脈沖,電機(jī)控制策略單位實(shí)時(shí)采集編碼器產(chǎn)生的脈沖,以計(jì)算頻率f,根據(jù)轉(zhuǎn)速計(jì)算公式:

得到電機(jī)的實(shí)時(shí)轉(zhuǎn)速ω。另一方面,還需要根據(jù)脈沖的個(gè)數(shù)n,根據(jù)角度計(jì)算公式:
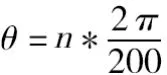
得到電機(jī)轉(zhuǎn)動(dòng)的角度θ。在被動(dòng)模式下,控制器通過(guò)參數(shù)ω和θ來(lái)控制電機(jī)的轉(zhuǎn)速和轉(zhuǎn)角;在半被動(dòng)模式下,參數(shù)ω和θ還用于動(dòng)態(tài)調(diào)整電機(jī)的運(yùn)轉(zhuǎn)狀態(tài),以適應(yīng)人體足部的動(dòng)態(tài)狀況。
整個(gè)電機(jī)及電機(jī)控制單元供電電壓為24 V。電機(jī)控制電路用兩路可調(diào)占空比的PWM波來(lái)控制H橋芯片工作,H橋芯片再將24 V電源按要求加在電機(jī)的兩電源端,控制電機(jī)的工作。H橋的工作原理如圖5所示。
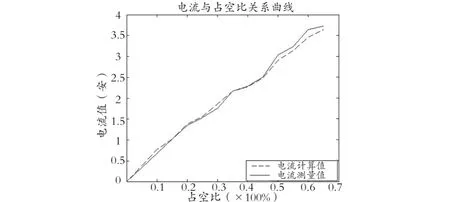
圖5 H橋芯片工作原理
控制器輸出的兩路PWM波為圖5中的PWM1和PWM2,在其中一路正在輸出PWM波時(shí),另一路必定持續(xù)輸出低電平,PWM波的頻率初始化時(shí)可調(diào),占空比D實(shí)時(shí)可調(diào),控制器根據(jù)占空比和電壓計(jì)算公式:

來(lái)控制輸出的電壓UAB,從而實(shí)現(xiàn)對(duì)電機(jī)的控制。其中,
t為T周期內(nèi)高電平時(shí)間。裝置在運(yùn)行過(guò)程中,可實(shí)時(shí)切換輸出PWM波的通道,改變電機(jī)的轉(zhuǎn)動(dòng)方向。
為測(cè)量流過(guò)電機(jī)的電流,在24 V電源流入H橋芯片之前加一個(gè)微小阻值的電阻(R=0.01 ?)。用電阻上的壓降Ud來(lái)反映流過(guò)電機(jī)的電流的大小,此壓降經(jīng)過(guò)放大后,根據(jù)電流計(jì)算公式:

計(jì)算出流過(guò)電機(jī)的實(shí)時(shí)電流大小。其中,IA為流經(jīng)電機(jī)的電流,G為后端信號(hào)放大倍數(shù)。由直流電機(jī)轉(zhuǎn)矩公式:
可知轉(zhuǎn)矩大小T與流過(guò)電機(jī)的電流大小IA成正比例關(guān)系,其中K為電機(jī)轉(zhuǎn)矩常數(shù)。因此,可通過(guò)調(diào)節(jié)IA來(lái)控制電機(jī)轉(zhuǎn)動(dòng)過(guò)程中轉(zhuǎn)矩的大小。
總的來(lái)說(shuō),無(wú)論在被動(dòng)模式還是半被動(dòng)模式中,控制器都必須控制電機(jī)按照控制程序里的參數(shù)進(jìn)行運(yùn)轉(zhuǎn)。采集單元負(fù)責(zé)采集IA相關(guān)的數(shù)據(jù)信息、光電編碼器產(chǎn)生的脈沖信息和足底壓力傳感器的壓力信息,傳送給控制器進(jìn)行計(jì)算和分析處理,得到IA、θ、f、ω的數(shù)值以及足底的運(yùn)動(dòng)狀況,控制器再根據(jù)這些參數(shù)產(chǎn)生的相應(yīng)PWM波來(lái)控制電機(jī)轉(zhuǎn)動(dòng)和工作。
3 裝置初步試驗(yàn)結(jié)果與分析
電機(jī)控制單元作為設(shè)計(jì)的踝關(guān)節(jié)康復(fù)裝置的執(zhí)行機(jī)構(gòu),其轉(zhuǎn)速和電流檢測(cè)模塊的精度直接影響到裝置最終的控制精度。當(dāng)電機(jī)工作在空載狀態(tài)時(shí),由直流力矩電機(jī)的轉(zhuǎn)速計(jì)算公式:
可知,電機(jī)的實(shí)時(shí)轉(zhuǎn)速ω1與電機(jī)兩端的電壓U1成正比,其中ω0、U0分別為直流電機(jī)的額定轉(zhuǎn)速和額定電壓。結(jié)合式(1)和(2),得到:
即頻率與占空比成正比例關(guān)系。實(shí)驗(yàn)測(cè)得占空比D從10%增加到99%(每次遞增10%)時(shí)對(duì)應(yīng)的頻率f (Hz)變化(每次測(cè)量5組數(shù)據(jù)取平均值)曲線如圖6所示。實(shí)驗(yàn)數(shù)據(jù)表明,裝置實(shí)際的占空比與頻率成正比例關(guān)系,與理論分析的結(jié)果一致,說(shuō)明裝置的轉(zhuǎn)速測(cè)量是準(zhǔn)確的。
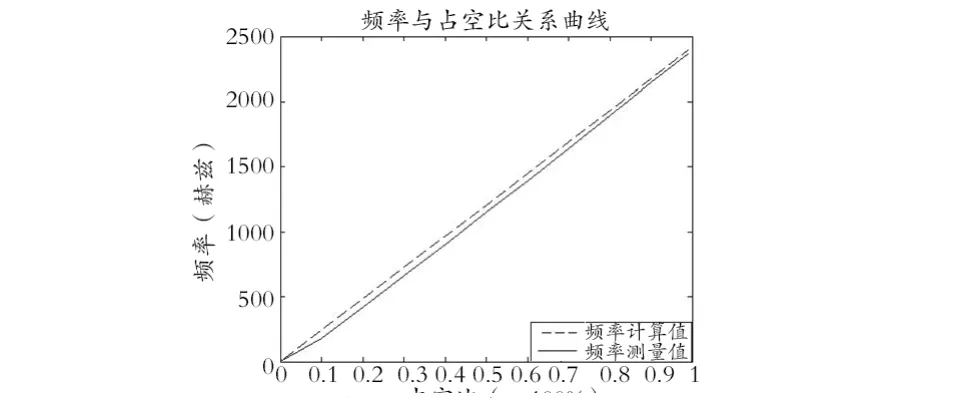
圖6 占空比與頻率關(guān)系曲線對(duì)比
當(dāng)電機(jī)工作在堵轉(zhuǎn)狀態(tài)時(shí),有:
其中L為電機(jī)電樞電感,r為電樞電阻。由此可計(jì)算出流過(guò)電機(jī)的電流i(A),并與裝置測(cè)量的電流IA做比較,結(jié)果如圖7所示。結(jié)果顯示,當(dāng)電流比較小時(shí),計(jì)算值會(huì)比測(cè)量值能夠保持一致,偏差較小;當(dāng)電流比較大時(shí),測(cè)量值和計(jì)算值存在一定的偏差,但從偏差值與實(shí)際值的比例來(lái)看,兩者最大的偏差在10%以內(nèi),因此裝置的電流檢測(cè)與理論分析是一致的。電機(jī)轉(zhuǎn)速和電流的有效檢測(cè),為踝關(guān)節(jié)康復(fù)裝置執(zhí)行機(jī)構(gòu)的高精度控制奠定了基礎(chǔ)。
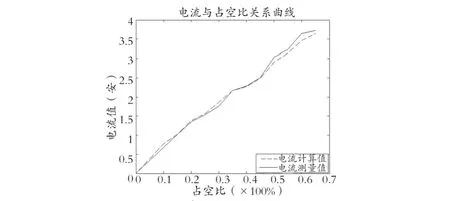
圖7 電流計(jì)算值與測(cè)量值曲線對(duì)比
足底壓力信號(hào)采集單元結(jié)構(gòu)簡(jiǎn)單,實(shí)際測(cè)試證明,能夠精確地檢測(cè)足底各個(gè)部位的壓力信號(hào),從而滿足裝置對(duì)足底壓力檢測(cè)功能的要求。
4 結(jié)論
本文設(shè)計(jì)的足部康復(fù)裝置使用方便,能以精準(zhǔn)的電子機(jī)械控制代替人工勞動(dòng),在踝關(guān)節(jié)矢狀面(單自由度)內(nèi)對(duì)使用者的足部進(jìn)行康復(fù)訓(xùn)練,有效減輕康復(fù)醫(yī)療人員的勞動(dòng)強(qiáng)度。裝置可實(shí)現(xiàn)被動(dòng)和半被動(dòng)兩種康復(fù)模式,康復(fù)訓(xùn)練涉及的各項(xiàng)參數(shù)既可按醫(yī)生診斷信息進(jìn)行設(shè)定,又可以在康復(fù)訓(xùn)練中根據(jù)使用者的足部信息不斷進(jìn)行反饋調(diào)整,提高康復(fù)訓(xùn)練的準(zhǔn)確度,使患者足部得到更有效、更科學(xué)的康復(fù)治療。
[1] 姚太順,孟憲杰.踝關(guān)節(jié)外科[M].北京:中國(guó)中醫(yī)藥出版社,1998.
[2] 曾世龍,姚立綱,郭曉寧,等.踝部關(guān)節(jié)與足部運(yùn)動(dòng)關(guān)系分析及其在腳踝康復(fù)裝置中的應(yīng)用[J].機(jī)械設(shè)計(jì)與研究,2013,(增刊):244-248.
[3] 魏晨婧,蓸學(xué)軍.足部矯形器在下肢運(yùn)動(dòng)損傷中的應(yīng)用[J].中國(guó)康復(fù)理論與實(shí)踐,2010,16(1):37-39.
[4] 劉更謙,高金蓮,楊四新,等.踝關(guān)節(jié)康復(fù)訓(xùn)練并聯(lián)機(jī)構(gòu)構(gòu)型及其運(yùn)動(dòng)學(xué)分析[J].機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新,2005,18(5):13-15.
[5] 王向東,劉學(xué)貞,仰紅慧,等.中國(guó)青少年踝關(guān)節(jié)跖屈、背屈肌群力量的研究[J].中國(guó)運(yùn)動(dòng)醫(yī)學(xué)雜志,2003,22(6):569-572.
[6] 陸銀春,朱國(guó)興,鄧樂(lè)增,等.多種工作模式的踢關(guān)節(jié)活動(dòng)器的研制[J].醫(yī)療衛(wèi)生設(shè)備,2006,7(12):74-75.
[7] sFSR? Force Sensing Resistor? Integration Guide and Evaluation Parts Catalog[S].
A Design of Ankle Rehabilitation Device
WU Jun-peng, LI Ri-hui, LI Ya-ning, GAO Jin-wu, JIANG Le-lun
School of Engineering, Sun Yat-sen University, Guangzhou Guangdong 511400, China
A series of study have shown that targeted and scientifc rehabilitation are more effective to the recovery of sick foot. This paper mainly introduces the hardware components of an ankle rehabilitation device, which mainly consists of two parts, a plantar pressure detection unit and a motor controlunit. It is such a closed loop control system that the acquisition system constantly detects and transmits some necessary parameters to the controller, which driving the device follow the pre-setting rehabilitation model and ultimately achieving the goal of regulating sick foot rehabilitation training.
ankle rehabilitation; plantar pressure detection unit; motor control unit; rehabilitation model
R496
A
10.3969/j.issn.1674-1633.2014.03.003
1674-1633(2014)03-0008-03
2013-12-14
教育部博士點(diǎn)基金新教師基金項(xiàng)目(No: 20120171120036);大學(xué)生創(chuàng)新訓(xùn)練計(jì)劃(1055813028)資助。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45