分布式消磁系統控制系統實時性和同步性研究
2014-05-07 03:19:18李玉生袁陽耿攀左超
船電技術 2014年12期
關鍵詞:系統
李玉生,袁陽,耿攀,左超
?
分布式消磁系統控制系統實時性和同步性研究
李玉生1,袁陽1,耿攀2,左超2
( 1.海軍駐431廠軍事代表室,武漢 430064;2.武漢第二船舶設計研究所,武漢 430064)
為確保消磁系統技術指標的實現必須保證系統實時性和同步性。本文介紹了一種含時間向量的數據信息傳輸與處理的CAN總線頂層標準框架,本協議應用于分布式消磁系統,能夠確保各分區消磁繞組所產生的磁場同步性;分析了消磁系統響應延時的原因,針對原因提出措施能夠確保消磁系統的實時性。
分布式消磁系統 同步 CAN總線
0 引言
隨著現代大型艦船噸位、總體尺寸的日益增大,傳統中、小型艦船的消磁系統已無法適應其磁場量值的增大和分布情況的復雜化,分布式消磁系統日益成為現代大型艦船消磁系統的發展方向。該系統不僅能減輕消磁系統的重量、提高消磁系統的可靠性和可維修性,還能適應艦船分段建造要求。
然而,艦船采用分布式消磁系統后,相比傳統集中式消磁系統,系統對各個消磁繞組控制的實時性和同步性提出了更高的要求,須采取措施保證消磁系統實時性,減小系統延時,才能確保消磁繞組產生的補償磁場與艦船的姿態和位置一致,同時還須采取措施來保證分布式消磁系統中各消磁電源的電流指令的時間同步性,以確保各分區消磁繞組所產生的磁場同步。
1 分布式消磁系統的實時性分析
艦船消磁采用地磁解算控制模式,控制流程圖如圖1所示。導航系統將艦船的經緯度、航向和姿態信息通過以太網發給消磁電流控制儀,消磁電流控制儀進行地磁解算和控制指令計算,并將控制指令通過CAN網發送給消磁電源,消磁電源接收指令,并根據指令調整輸出電流給消磁繞組供電,消磁繞組產生補償磁場。
由于在整個過程中艦船是出于運動狀態,必須減小各環節的延時,盡可能保證消磁繞組輸出的補償磁場與艦船當前位置和姿態一致。
在整個消磁控制流程中有五個環節會產生延時,具體如下:
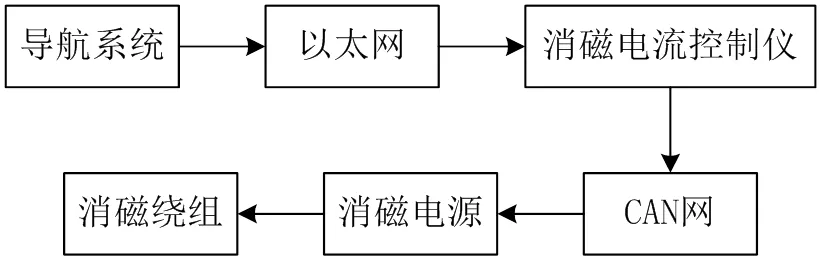
圖1 消磁系統控制流程圖
1)以太網傳輸延時,包括網絡傳輸延時1,導航系統發送導航信息間隔2,網絡堵塞延時3,其中1和2是可估的,3是隨機的,可通過降低網絡負載來優化避免。
2)消磁電流控制儀解算延時,首先無論消磁電流控制儀接收導航信息采用查詢模式或者中斷模式,都會產生延時4,查詢方式產生的延時大于中斷模式產生的延時;其次,控制器內部進行地磁解算和控制電流換算會產生延時5;最后將控制指令發送給CAN網會產生延時6,其中控制指令的幀數越多,6越大,根據指令幀數估算6可達約1ms。
3)CAN網傳輸延時,包括網絡傳輸延時7,導航系統發送導航信息間隔8,網絡堵塞延時9,與以太網類似7和8是可估的,9是隨機的,需要從設計上盡量避免的。
4)消磁電源電力電子變換環節延時,包括CAN指令接收延時10;直流側濾波電路產生延時11,接收指令后PI控制器產生的延時12;輸出電流和負載電流檢測回路有前置低通濾波器,來對高頻分量進行衰減,低通濾波器在濾除高頻分量的同時會引起檢測信號相位的滯后延時13;負載電流和輸出電流信號經過AD轉換,采樣延遲一個采樣周期14;電流電壓信號經調節器產生指令,但是在DSP中進行調制波和載波交截比較產生占空比信號時,會產生滯后一拍的延時15。
5)消磁繞組產生的補償延時,消磁繞組敷設在殼體內或殼體外,可以等效為一個電感,消磁繞組的電流變化將因為消磁繞組的等效電感產生一個延時16。
總延時delay為:
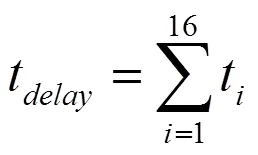
假設艦船以20°/s變化速率水平回轉,在消磁繞組穩態補償誤差為0,為確保補償誤差小于1%,求解最大總延時tdelay。


考慮導航信息更新率為50次/s,即導航系統發送導航信息間隔2=20 ms,則除去2后delay允許延時余量為8.7 ms,所以在余下各個導致系統延時的環節都必須采取措施嚴格控制延時時間。須采取針對性措施,應將系統延時控制在25 ms范圍內,從而保證系統的實時性要求。針對以上分析的延時環節,可采取的措施如下:
1)以太網和CAN網環節,提高CAN網傳送波特率減少傳送延時,提高網絡冗余量以避免堵塞。
2)消磁電流控制儀環節,采用中斷方式接收導航信息,簡化地磁解算算法和控制算法,提高地磁解算算法和控制算法程序效率,提高采用的嵌入式控制芯片的主頻。
3)消磁電源環節,采用狀態觀測器和雙環控制提高設備動態響應性能,采用主頻更高的DSP控制芯片,提高消磁電源開關頻率,在滿足濾波效果的前提下,減小輸出濾波環節產生的延時,采用中斷方式接收系統指令。
4)消磁繞組環節,采用分步式消磁系統結構替代集中式結構,采用分步式消磁系統后消磁繞組分別由各消磁電源分別供電,各消磁繞組電感量不大。傳統的集中式消磁系統結構,全船縱向繞組、橫向繞組和垂向繞組分別串聯,全船縱向繞組的等效電感約100 mH,除造成響應滯后外,還對消磁電源的安全可靠性造成影響。
2 分布式消磁系統的時間同步要求
分區消磁的同步技術實際上就是各分區輸出電流的同步問題。消磁系統采用n個消磁電源模塊分別為n個消磁繞組供電,由于各消磁電源中串入的電感遠較各分區消磁繞組電感值大,加之各分區消磁繞組電容的影響,致使各分區之間因消磁繞組電感差別對各區時間常數的影響很小,由于各消磁電源收到控制指令到輸出電流延遲是一致的,因此只要保證各分區控制指令同步的,即能夠保證各分區消磁電源輸出電流同步,從而保證各消磁繞組產生補償磁場同步。
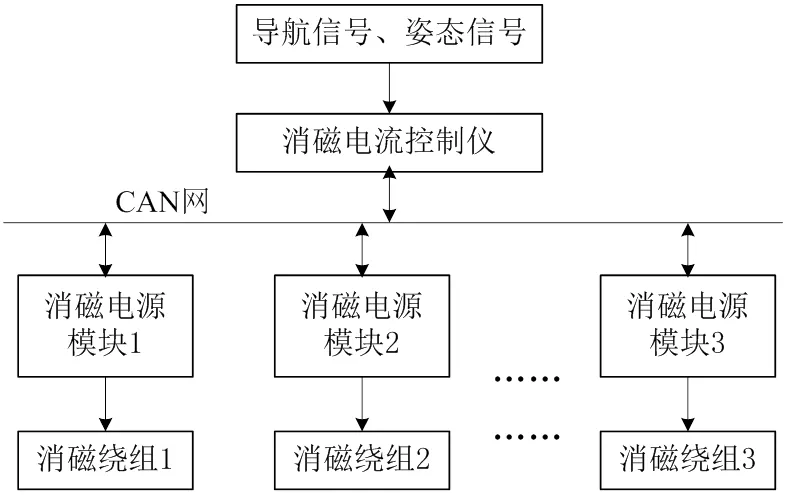
圖2 基于CAN總線的消磁系統結構示意圖
基于CAN總線結構的分布式消磁系統控制結構如圖2所示,消磁電流控制儀通過CAN網向n個消磁電源模塊下發控制指令,n個消磁電源模塊通過CAN網向消磁電流控制儀發送各消磁電源電壓、電流等工作狀態信息。控制系統采用何種通訊機制保證n個模塊的控制指令實時性,是分布式消磁系統的一個關鍵技術。
3 消磁系統CAN總線同步控制設計
分布式消磁系統CAN網采用CAN 2.0B協議標準,根據整個網絡數據幀延時要求,通訊波特率設定為250 kbps,通訊數據格式低字節在前,高字節在后。假設分布式消磁系統由1臺消磁電流控制儀控制M臺消磁電源,同時由M臺消磁電源給N套消磁繞組供電。消磁電流控制儀需要向M臺消磁電源發送總起停指令,每臺消磁電源(共M臺)的起停指令,每套繞組(共N套)所需電流指令(每套繞組的電流指令送至消磁電源的監控單元,然后監控單元將指令處理后分發給消磁電源內部的電源模塊)。
在每臺消磁電源中,各消磁電源模塊將各自輸出電壓、電流信號,工作、停機、故障信號(故障信號包括:短路、輸出過載、過溫、輸入欠壓、輸出過壓)發送至電源監控單元,監控單元將信息匯總再反饋信息給消磁電流控制儀,包括每組電源的輸出電壓、電流信號(即對應某套繞組的電壓、電流),工作、停機、故障信號(故障信號包括:短路、輸出過載、過溫、輸入欠壓、輸出過壓)。
基于上述的通訊協議和要求,本文借鑒TTCAN時間觸發機制特點,針對消磁系統實時控制需求和傳輸大量數據的需要,根據CAN的底層協議,采用數字分布系統時間同步總線協議完成了消磁系統的CAN網絡協議編制。圖3給出基于CAN總線的消磁系統結構示意圖。為了交換數據與同步時間,消磁電流控制儀作為授時單元為消磁電源等工作電源提供時間基準。消磁電源都嵌入了通訊單元,各通訊單元均包括一個24位的時間寄存器,用于保存工作時間。
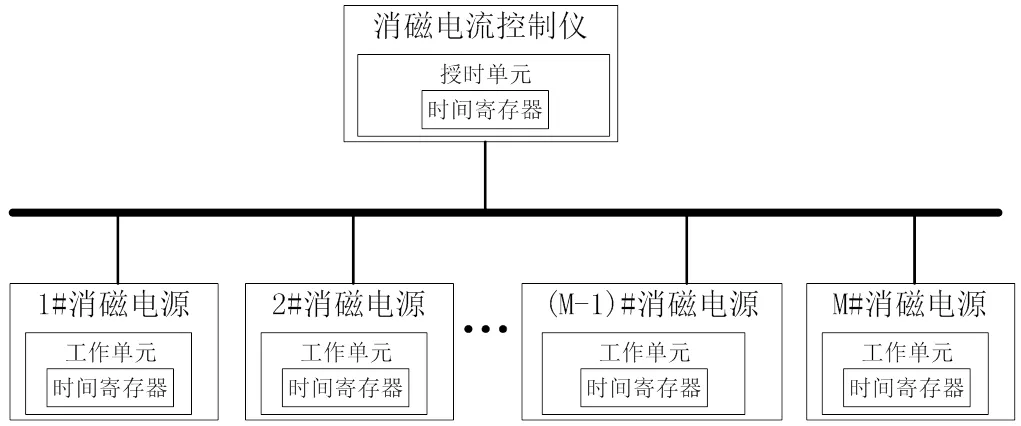
圖3 基于CAN總線的消磁系統結構示意圖
1)消磁系統CAN總線協議數據幀
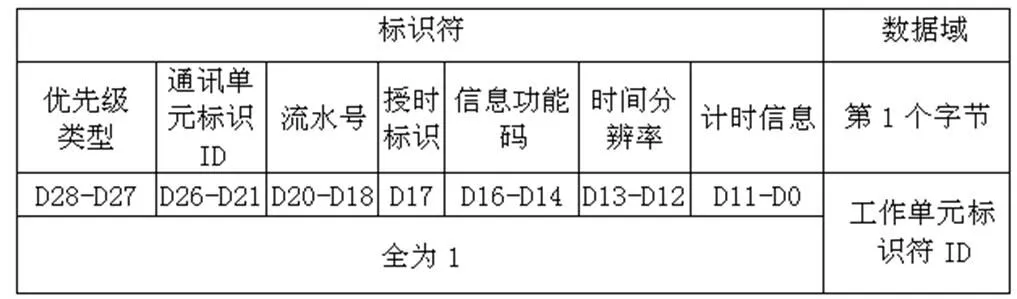
消磁系統CAN網協議采用CAN數據幀擴展幀來完成所述通訊功能。本協議將擴展幀的29位標識符的分配格式如表1所示,數據幀包含優先級類型、通訊單元標識ID、流水號、授時標識、信息功能碼、時間信息。
表1 數據幀ID結構示意圖

2)消磁系統同步CAN總線協議流程
如圖4所示,消磁電流控制儀作為授時單元工作時發送廣播校時幀至各消磁電源工作單元,各消磁電源工作單元根據廣播校時幀的時間信息校正各自的時間,保持與授時單元的時間同步。在時間同步的基礎上,各消磁電源工作單元發送工況信息幀傳送至消磁電流控制儀,消磁電流控制儀作為授時單元根據工況參數值決定是否發出相應的控制指令給各消磁電源工作單元。
消磁電流控制儀作為授時單元將其時間信息通過廣播校時幀對全網廣播以進行統一授時,廣播校時幀包含仲裁域的29位標識符的格式如表2所示。優先級類型中00最高優先級,授時標識字段設置為0,表示為授時功能使能;信息功能碼字段設置為100,表示該幀為校時幀。時間分辨率當置為00時表示時間細調,時間信息寫入到其內部的時間寄存器的低12位。時間粗調與時間細調的周期可根據消磁系統的實時性要求作相應調整。
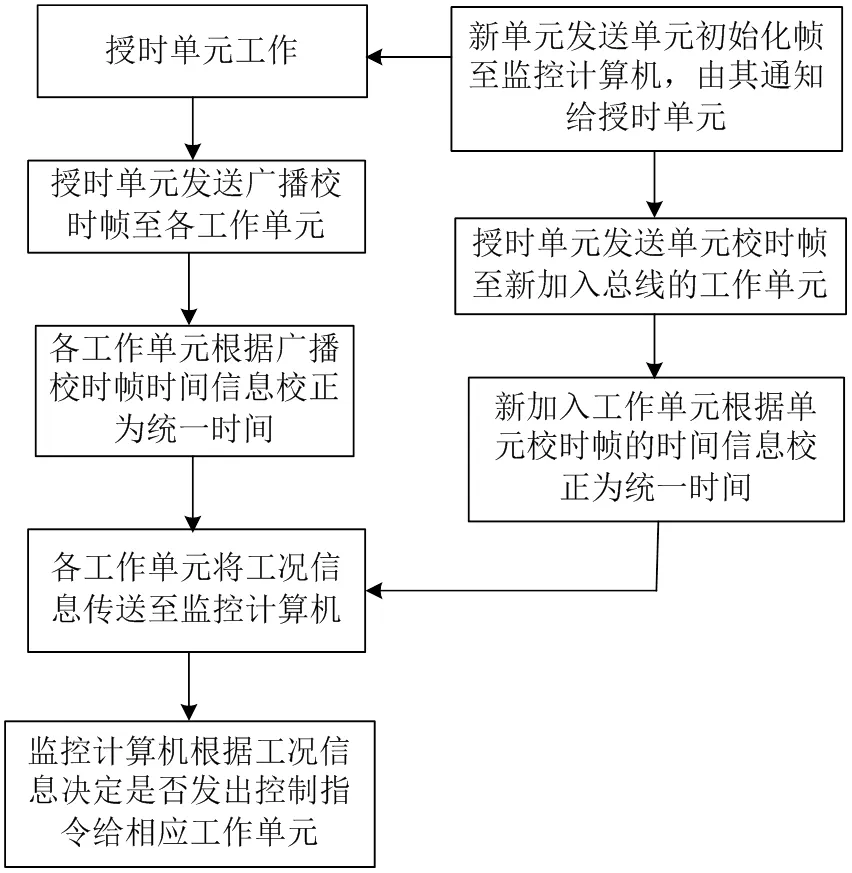
圖4 總線協議時間同步流程
3)消磁系統CAN總線協議同步模式
a. 消磁系統CAN網廣播同步模式
表2 廣播校時幀

b. 消磁系統CAN網單元初始化同步
當有新的工作單元,如消磁電源、絕緣監測模塊等加入到CAN總線上時,該工作單元首先發送單元初始化幀至消磁電流控制儀,該單元初始化幀包括仲裁域的29位標識符與數據域兩部分,該單元初始化幀包括仲裁域的29位標識符與數據域兩部分,該初始化幀的格式如表2所示,29位標識符全為1,該工作單元的標識符ID寫入到數據域的從高位到低位的第一個字節,如表3所示。
表3 單元初始化幀
c. 消磁系統單元初始化同步校時
如表4所示,消磁電流控制儀接收到該單元初始化幀后將新工作單元的標識符ID和發送單元校時幀的指令通知給消磁電流儀授時單元。
d. 消磁系統單元信息傳送模式
在廣播校時或單元校時完成后,各消磁電源將自己的工況信息通過工況信息幀傳送給消磁電流控制儀,該工況信息幀包括仲裁域的29位標識符與數據域兩部分,其格式如表5所示。
表4 單元校時幀

表5 工況信息幀
4 結論
實時性和同步性對艦船分布式消磁系統技術指標的實現起到關鍵作用。艦船分布式消磁系統采用含時間向量的數據信息傳輸與處理的CAN總線頂層標準框架,可為全船現場單元提供一種時間向量的數據幀定義、同步和異步信息權限分配、可實現消磁系統BIT故障自診斷,保證控制指令和電源上傳信息完整性和實時性;嚴格控制網絡傳輸環節、消磁控制解算環節、消磁電源電力電子變換環節的響應延時;從實時性和同步性兩個方面保證分布式消磁系統繞組磁場補償精度。
[1] 胡文生. 中型艦船分區消磁系統設計應用淺析[J ]. 水雷戰與艦船防護, 2010.
[2] 肖存龍,肖昌漢,李光磊. 分布式消磁系統繞組補償電流快速調整[J ]. 海軍工程大學學報, 2011.
[3] 唐申生, 周耀忠, 莊清華. 大型艦船分區消磁理論研究[J ] . 海軍工程大學學報, 2003.
[4] 肖錦棟,費敏銳. CAN 現場總線性能評價[J ] . 上海大學學報(自然科學版) ,1997.
[5] 陽憲惠. 現場總線技術及其應用[M] . 北京:清華大學出版社,1999.
[6] 劉墩東,周文博.基于CAN總線的智能斷路器控制器設計[J].廈門大學學報(自然科學版),2006,45(6):783-788.
[7] 李文華,李可維,余躍聽,高原. 數字分布式系統時間同步CAN總線協議研究[J].艦船科學技術,2010.
Design of Synchronization and Real time in Ships Distributed Degaussing System
Li Yusheng1, Yuan Yang1, Geng Pan2, Zuo Chao2
(1. Naval Representatives Office in 431 Factory, Wuhan 430064, China; 2. Wuhan Second Ship Design and Research Institute, Wuhan 430064, China)
U665.18 TP273
A
1003-4862(2014)12-0005-04
2014-10-08
李玉生(1977- ),男,工程師。研究方向:電力系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32