基于自適應模糊PID控制方法的研究
2014-05-07 12:49:26周海濤周建華杭小宇
機械工程與自動化
2014年3期
周海濤,周建華,杭小宇
(揚州大學 機械工程學院,江蘇 揚州 225127)
0 引言
傳統的PID控制在時域響應速度、參數的自整定以及時變、非線性等方面存在著不足,對于大多數被控對象而言,只要系統的參數整定達到一定的要求,系統基本可以實現無差控制,即穩定性良好。但在動態特性控制時,傳統PID的自適應能力較差,當系統的控制參數發生變化時,傳統的PID控制會產生很大的調整變化,在此過程中可能引起系統特性變弱,甚至導致其嚴重不穩定。為了實現控制器參數的自整定功能,使其具有良好的自適應能力,本文設計了自適應模糊PID控制器。
1 PID控制原理
PID控制主要由比例環節、積分環節和微分環節組成,通過各環節的調節器對理想輸出r(t)與實際輸出y(t)之差進行運算調節,使執行機構達到按預定輸入量運動的目的。傳統PID控制系統原理框圖如圖1所示。
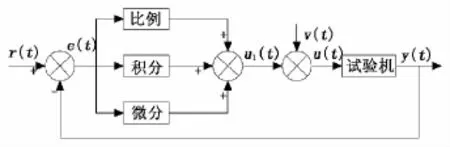
圖1 傳統PID控制原理框圖
給定值r(t)與實際輸出值y(t)構成的控制偏差為:

對控制偏差的相關環節按照一定的線性組合,從
而可有效地控制被控對象。PID控制的控制規律為:

其中:Kp為比例系數;Ki為積分系數;Kd為微分系數。
2 模糊控制原理
在實際應用中,有時很難對被控制對象建立精確的數學模型,后來人們將積累的人工控制經驗利用一系列的條件語句來描述,這就是控制規則;另外,利用設定的模糊語言變量以及邏輯推理結構,將形成的模糊控制轉換成數值運算。
一般的模糊控制系統由模糊數據庫、模糊規則庫和推理機組成。……
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
