無人機液壓彈射系統的模型研究與仿真
2014-05-10 07:48:28趙灼輝吳素珍
機床與液壓 2014年22期
趙灼輝,吳素珍
(1.四川電力職業技術學院,四川成都610000;2.河南工程學院,河南鄭州451191)
伴隨著無人機在社會各領域中的廣泛應用,與之配套的彈射裝置也得到了長足的發展,蓄能器供油式無人機液壓彈射系統因具有可靠性高、反應速度快等特點,常被用于彈射中小型無人機[1]。
以往在對類似系統進行建模時,增速機構常被忽略,而這會對分析系統性能的精確性造成一定的影響。文中提出一種分析滑輪組模型的新方法,并利用功率鍵合圖法得到了無人機液壓彈射系統的數學模型,通過對一實際系統進行仿真,得到了一些有益的結論。
1 無人機液壓彈射系統工作原理
無人機液壓彈射系統的工作原理簡圖如圖1所示,系統主要由液壓能源系統、控制元件、彈射架、增速機構、無人機及滑車系統和緩沖裝置等組成。系統工作過程可分為4 個階段,文中主要研究系統的彈射階段。
彈射階段,閥2、6 通電,液控單向閥5 反向開啟,蓄能器和液壓泵中油液進入液壓缸無桿腔,驅動活塞桿低速運動,經滑輪組增速后,鋼絲繩帶動無人機及滑車實現高速運動,當滑車加速到彈射架指定位置時,行程開關動作,閥2 斷電,閥8 反向關閉,無人機脫離滑車起飛,系統進入緩沖階段。
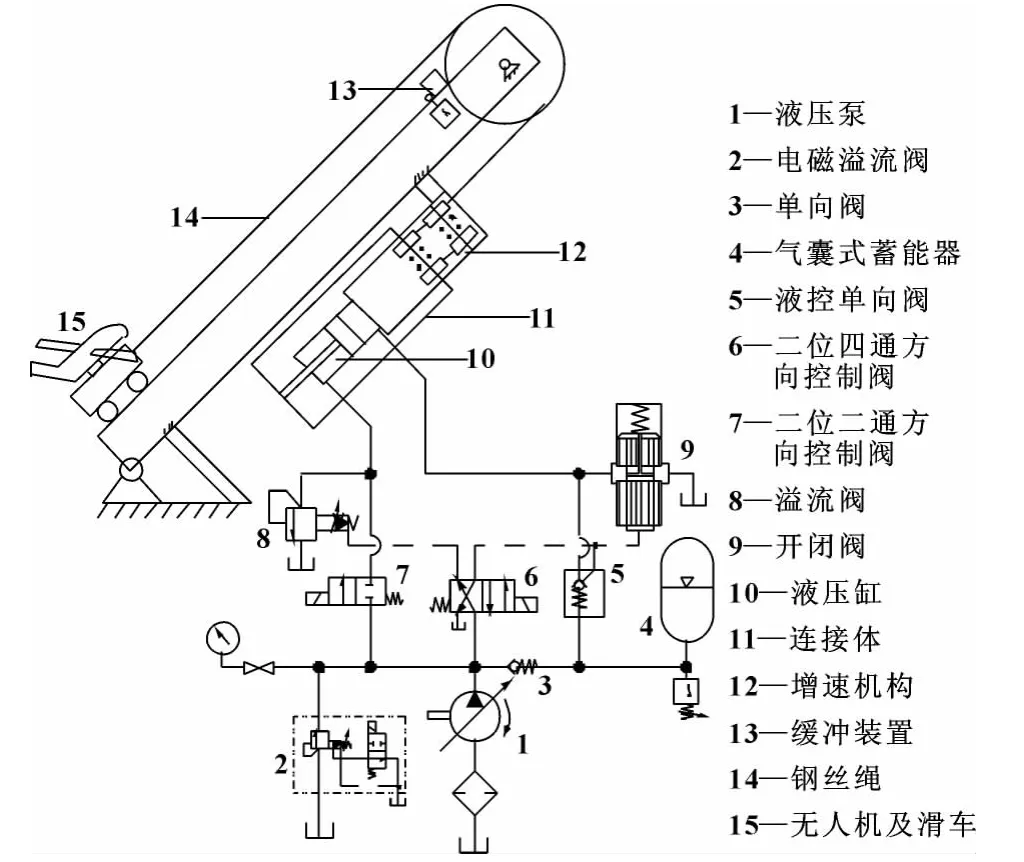
圖1 無人機液壓彈射系統工作原理簡圖
2 無人機液壓彈射系統模型的簡化
2.1 增速機構模型的簡化
增速機構由動滑輪組、定滑輪組和鋼絲繩等組成,圖2 為增速倍數n為偶數的增速滑輪組力學模型,若需n為奇數,則在鋼絲繩末端繞過最后一個定滑輪后,將其固定在動滑輪組上[2]。
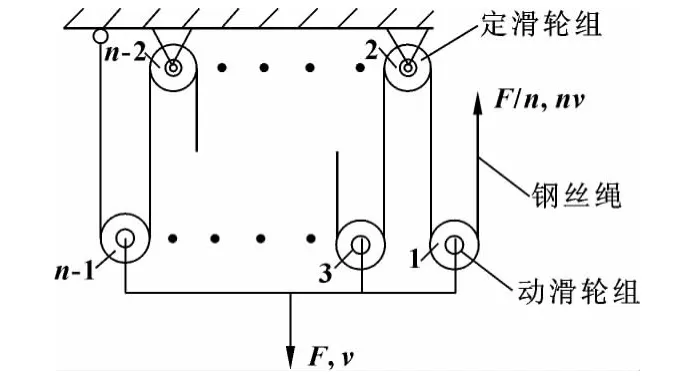
圖2 增速滑輪組力學模型
文中對滑輪組模型作如下考慮:
(1)考慮到鋼絲繩的伸縮,可將鋼絲繩看作彈性很小的彈簧,將鋼絲繩與滑輪、滑輪軸承處的摩擦看作阻性元;
(2)將滑輪組間2n段鋼絲繩按并聯規則等效;
(3)將活塞桿、連接體、動滑輪組和動滑輪組轉換的質量體合并為m1;定滑輪組轉換的質量體為m2,無人機及滑車的質量為m3。
(4)因對滑輪組和鋼絲繩進行了等效,故在簡化模型中用杠桿來表示增速關系。
2.2 液壓系統的簡化
為了簡化模型,對液壓系統作以下處理[3]:
(1)合并了軟管和液壓缸的液容、軟管和閥口的液阻;
(2)相對于蓄能器,液壓泵的流量較小,因此忽略了液壓泵所在管路的液阻和液容。
2.3 無人機液壓彈射系統的簡化模型
根據以上分析,可得無人機液壓彈射系統的簡化模型如圖3所示。

圖3 無人機液壓彈射系統簡化模型
3 無人機液壓彈射系統數學模型建立
3.1 無人機液壓彈射系統的數學模型
功率鍵合圖,簡稱鍵合圖,是一種用來描述工程系統能量結構的圖示表示方法,是進行液壓系統乃至各類工程動態特性仿真時有效的建模工具[4]。
根據無人機液壓彈射系統簡化模型及鍵合圖建模的有關規則[5],建立了如圖4所示的無人機液壓彈射系統的鍵合圖模型。模型中狀態變量有:蓄能器容積的變化V1,液壓缸進油腔容積的變化V9,液壓缸出油腔容積的變化V18,質量體m1的動量P12,質量體m2的動量P24,無人機及滑車的動量P31,等效鋼絲繩的變形X20,連接滑車鋼絲繩的變形X27。
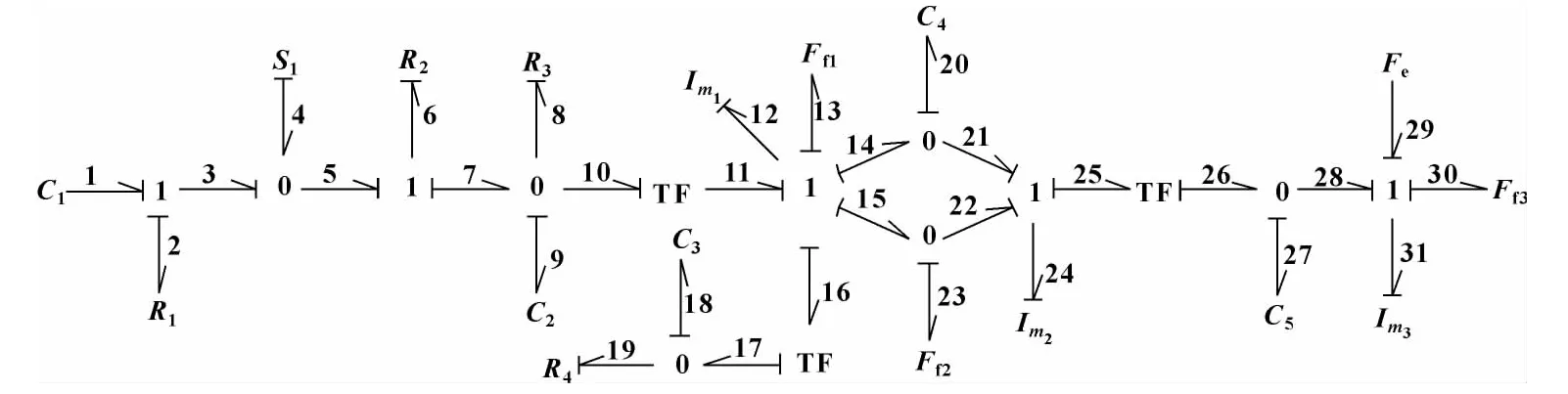
圖4 無人機液壓彈射系統鍵合圖模型
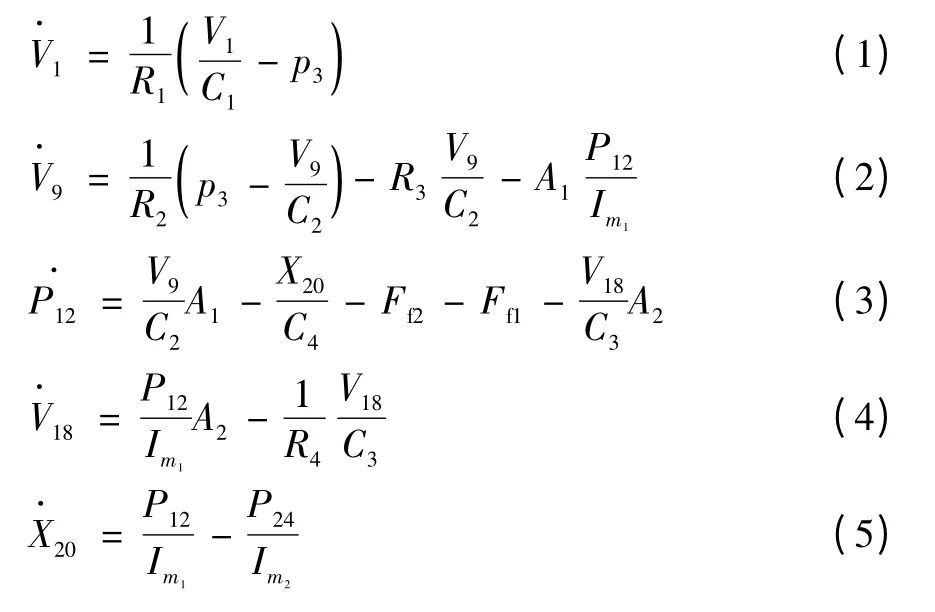
依據鍵合圖模型,可推導出下列狀態方程:

其中:
式中:p3為蓄能器出口壓力;Sf為液壓泵流量;C1為蓄能器的容性;C2為液壓缸進油腔和進油管道液容之和;C3為液壓缸出油腔和出油管道液容之和;C4為等效鋼絲繩的容性;C5為連接滑車鋼絲繩的容性;R1為蓄能器出口液阻;R2為液控單向閥液阻和進油管道液阻之和;R3為自制開閉閥的泄漏液阻;R4為出油管道液阻和溢流閥液阻之和;Ff1為液壓缸活塞處摩擦力;Ff2為滑輪組中總摩擦力;Ff3為無人機及滑車所受阻力;Fe為無人機自身動力;Ⅰm1為m1的質量;Ⅰm2為m2的質量;Ⅰm3為m3的質量;A1為液壓缸進油腔面積;A2為液壓缸出油腔面積;n為滑輪組增速比。
3.2 數學模型參數的確定
(1)蓄能器供油模型
蓄能器的工作過程可按絕熱過程處理,依據絕熱過程氣體狀態方程可得[6]:

其中:

式中:p1為蓄能器內瞬時壓力;p0為蓄能器的充氣壓力;pa為蓄能器的充油壓力;V0為蓄能器的容積;q為蓄能器出口流量;k為氣體熵數;E為液壓油彈性模量。
(2)滑輪轉動的等效轉換
按照能量守恒的原則將滑輪的轉動轉換為定質量體的直線運動[7]:

對定滑輪組:
對動滑輪組:
其中:J為滑輪的轉動慣量;ωi為動或定滑輪組中第i個滑輪的角速度;me為定質量體的質量;v為定質量體的速度。
4 無人機液壓彈射系統的仿真
采用變步長的四階龍格庫塔法,通過在MATLAB軟件上編寫仿真程序求解上述狀態微分方程組[8]。仿真系統的主要參數:蓄能器的容積為0.063 m3,蓄能器的充氣壓力為16 MPa,蓄能器的充油壓力為23 MPa,無人機及滑車質量為110 kg,無人機最小安全起飛速度為35 m/s,滑輪組增速比為20,液壓缸直徑為0.125 m,行程為0.6 m,彈射架導軌長為8 m,仿真時間為0.4 s。
無人機行程為6.4 m 時仿真結束,忽略緩沖階段的時間,可得液壓缸進油腔壓力變化曲線如圖5所示,無人機及滑車速度變化曲線如圖6所示。
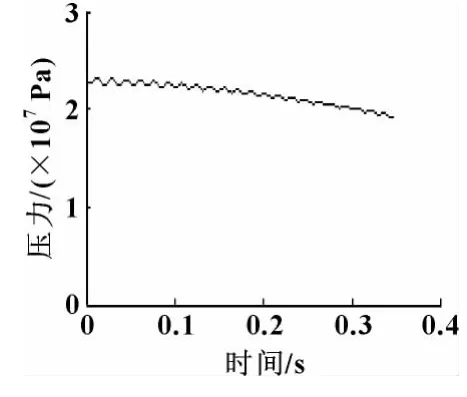
圖5 液壓缸進油腔壓力變化曲線

圖6 無人機及滑車速度變化曲線
由仿真可知:t=0.35 s 時,無人機的速度為35.6 m/s,滿足了無人機安全起飛的速度要求。通過與相關試驗類比,證明該研究方法是可行的。
5 結論
(1)提出了一種分析滑輪組模型的新方法,得到了無人機液壓彈射系統的簡化模型,為系統的進一步分析奠定了基礎。
(2)基于功率鍵合圖法建立了無人機液壓彈射系統的鍵合圖模型,推導出了模型的狀態微分方程;經過仿真與類比分析可知,功率鍵合圖法對研究該系統是有效的。
[1]國外無人機大全編寫組.國外無人機大全[M].北京:航空工業出版社,2001:447-457.
[2]李悅,裴錦華.無人機氣液壓發射動力學數值仿真[J].機械工程學報,2011,47(8):183-190.
[3]劉興陽,同智寬,李永林,等.無人機液壓彈射裝置能源系統仿真研究[J].機床與液壓,2008,36(12):170-172.
[4]KARNOPP D,ROSENBERG Ronald C.System Dynamics:A Unified Approach[M].NewYork:Wiley-Interscience,1990.
[5]王中雙.鍵圖理論及其在系統動力學中的應用[M].哈爾濱:哈爾濱工程大學出版社,2000:19-60.
[6]嚴金坤.液壓動力控制[M].上海:上海交通大學出版社,1986:1-35.
[7]趙俊波.取料系統起動特性及速度穩定性的理論分析和試驗研究[D].鄭州:鄭州大學,2010:18-20.
[8]劉白雁.機電系統動態仿真[M].北京:機械工業出版社,2005:108-111.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
