新型多總線絕對值編碼器在風電系統(tǒng)中的應用
2014-05-11 03:11:12卜樹坡孟桂芳
制造業(yè)自動化 2014年11期
卜樹坡,孟桂芳,程 磊
(蘇州工業(yè)職業(yè)技術學院 電子與通信工程系,蘇州 215104)
新型多總線絕對值編碼器在風電系統(tǒng)中的應用
卜樹坡,孟桂芳,程 磊
(蘇州工業(yè)職業(yè)技術學院 電子與通信工程系,蘇州 215104)
0 引言
絕對值編碼器因其具有絕對參考零位,重新上電無需初始化等優(yōu)點在實際工業(yè)生產(chǎn)中廣泛用于角度、位置、速度和加速度等參數(shù)的檢測,例如大型施工機械回轉臺,機器人控制,數(shù)控機床的行程控制以及風電系統(tǒng)變槳電機轉子旋轉控制等[1]。單圈編碼器的測量精度及測量范圍已經(jīng)無法滿足現(xiàn)代化工業(yè)生產(chǎn)的高精度、高可靠性運行要求,多圈絕對值編碼器不僅可以精確測量一周之內的位置,而且可以記錄輸出軸轉過的圈數(shù),使測量范圍擴大到單圈編碼器的幾百倍甚至上千倍,大大擴展了編碼器的應用領域[2,3]。隨著現(xiàn)場總線技術在工業(yè)生產(chǎn)中的廣泛應用,針對不同總線間的數(shù)據(jù)協(xié)議互不兼容,不同數(shù)據(jù)協(xié)議的設備不能掛接到其它總線網(wǎng)絡中去等問題[4],設計了可實現(xiàn)與同步串行(SSI)通訊協(xié)議、PROFIBUS以及MODBUS三種目前應用最為廣泛的總線協(xié)議相兼容的接口裝置。
1 多圈絕對值編碼器的結構形式
本文設計了一種結構新穎的多圈絕對值編碼器,它包括單圈絕對值編碼器和多個帶有兩個碼道的減速齒輪。單圈絕對值編碼器的結構原理如圖1所示,由碼盤,光源,光電器件和遮光板組成。在一個碼盤上,刻有規(guī)則的多個碼道,從抗干擾的角度考慮,采用格雷碼的編碼格式,其主要優(yōu)點是輸出數(shù)字量每次只跳變一位,因此可檢測出錯誤的跳變數(shù)據(jù)。對于減速齒輪,均采用相同的結構,如圖2所示。每個齒輪上帶有兩道格雷碼形式的碼道,以及減速比為4:1的大小兩個齒輪,相當于將多圈的碼盤分散到多個齒輪上,這樣可以節(jié)省一個多碼道碼盤。通過設置相應的光電轉換電路,即可實現(xiàn)多圈的數(shù)據(jù)輸出。對于可記錄圈數(shù)為256的編碼器,所需的齒輪數(shù)由下式得到:


圖2 新型編碼器結構原理圖
格雷碼是一種具有反射特性和循環(huán)特性的單步自補碼,屬于可靠性編碼,是一種錯誤最小化的編碼方式[5],如表1所示。

表1 幾種自然二進制碼與格雷碼的對照
該新型結構一方面實現(xiàn)了位置的多圈不重復測量,還節(jié)省了一個多碼道碼盤,簡化了系統(tǒng)體積,降低了系統(tǒng)成本。
2 數(shù)據(jù)接口與協(xié)議轉換
所設計的協(xié)議轉換與數(shù)據(jù)接口裝置工作原理如圖3所示。裝置接收光電編碼器發(fā)出的數(shù)字信號,經(jīng)整形、校正等信號調理過程后,轉換成標準的數(shù)據(jù)格式,再轉換成SSI通訊協(xié)議、MODBUS協(xié)議以及PROFIBUS協(xié)議,在硬件電路中設計各總線的物理接口電路,即可實現(xiàn)編碼器與多總線的兼容。

圖3 數(shù)據(jù)接口及協(xié)議轉換裝置原理圖
SSI協(xié)議是高精度絕對值編碼器中一種較常用的數(shù)據(jù)傳送協(xié)議。它采用主機主動式讀出方式,即在主控者發(fā)出的時鐘脈沖的控制下從最高有效位開始同步傳送,其通訊協(xié)議的時序圖如圖4所示。首先搜索幀起始位,由時鐘脈沖的上升沿開始定時,在監(jiān)測到高電平時間大于12us時,認為是開始讀取數(shù)據(jù),時長為定時時間到讀取一個數(shù)據(jù)位,如此反復讀得25位數(shù)據(jù)。第26個時鐘脈沖輸出的數(shù)據(jù)丟棄;第27個時鐘脈沖的上升沿后下降沿的到來時間間隔應大于或等于12us,那么第27個時鐘脈沖即為一幀新數(shù)據(jù)的開始,否則為重讀。重讀數(shù)據(jù)可用于校驗已得到的數(shù)據(jù)是否正確。MODBUS總線采用主從式通訊方式,每組數(shù)據(jù)包括起始幀、地址幀、功能碼和數(shù)據(jù)幀以及CRC校驗幀。每一幀數(shù)據(jù)的通訊協(xié)議采用ASICII中定義的通用串行通訊協(xié)議,包括一個起始位,一個停止位,8個數(shù)據(jù)位,一個奇偶校驗位,傳送波特率在1200~38400之間可選。其中地址幀用于標識請求的從站位置,功能碼用于表明請求類型,數(shù)據(jù)幀用于傳送具體數(shù)據(jù)或者控制命令[6]。PROFIBUS是一種不依賴于廠家的開放式總線標準,采用多主從結構,具有可靠性高、性能高、實時性好及其獨特的設計等優(yōu)點。本裝置采用PROFIBUS-DP協(xié)議,報文數(shù)據(jù)規(guī)范包括起始區(qū)、地址區(qū)和數(shù)據(jù)區(qū)。起始區(qū)表明數(shù)據(jù)的起始,地址區(qū)負責標識訪問的設備,數(shù)據(jù)區(qū)的數(shù)據(jù)格式采用PPO1的數(shù)據(jù)格式,包含編碼器的輸出值以及轉向、狀態(tài)等,從站響應數(shù)據(jù)規(guī)范采用相同的形式[7]。

圖4 SSI通訊協(xié)議時序圖
3 裝置設計
3.1 硬件設計
裝置硬件設計如圖5所示。其中DSP芯片采用TMS320LF2407A作為主控芯片,其主頻最高可達40MHz[8]。編碼器的接口與IO口相連,通過讀取IO口狀態(tài)來獲取各個碼盤的當前值。采用撥碼開關的硬件方式設置地址以及選擇具體的通訊協(xié)議。SSI采用IO口模擬的方式,MODBUS硬件接口電路直接與DSP內部的串行通訊接口(SCI)相連,對于PROFIBUS協(xié)議,采用西門子公司的從站專用協(xié)議轉換芯片SPC3,將串行數(shù)據(jù)轉化為并行數(shù)據(jù),再通過DSP的并行外設接口進行通訊。各個協(xié)議的物理硬件接口電路芯片均選用485芯片。
3.2 光電轉換電路
新型絕對值編碼器設計了一個通用光電轉換電路,即可實現(xiàn)多圈的數(shù)據(jù)輸出[9]。光電元件選用SE2460和SD2440,光電接收元件接收的信號經(jīng)過放大、整形后形成方波信號再進入單片機處理。圖6(a)為編碼器的信號放大電路,其中電阻R1將編碼器上光敏接收元件的電流信號轉換為電壓信號,放大器N2和電阻R2、R3組成放大電路,小信號由IN_A1輸入,經(jīng)放大后由OUT_A1輸出。圖6(b)為A1信號的整形電路,OUT_A1信號經(jīng)比較器LM139轉換為方波信號,再經(jīng)鎖存器CD54HC573及數(shù)據(jù)總線送入單片機處理,經(jīng)譯碼并計算出編碼器角度值。

圖5 編碼器接口硬件結構圖

圖6 光電信號處理電路
3.3 軟件設計
圖7為軟件程序流程圖。首先進行系統(tǒng)初始化,讀取碼盤信號并轉化為16位數(shù)字格式,讀取設定地址值以及通訊協(xié)議選擇值,根據(jù)所選擇的協(xié)議類型執(zhí)行相應的協(xié)議轉換程序,判斷是否接收到相匹配的地址,若收到則進行相應的數(shù)據(jù)傳送[10]。同時,還可以對編碼器的狀態(tài)進行檢測,若讀取信號不正常,通知上位機,進行相應的處理,避免誤操作。

圖7 軟件流程圖
4 實際應用
本文利用絕對值編碼器作為反饋元件,在風電系統(tǒng)中拾取變槳控制系統(tǒng)的轉速和位置參數(shù)。變槳距控制系統(tǒng)對提高風力發(fā)電系統(tǒng)的發(fā)電效率和電能質量起到至關重要的作用,如圖8所示。E1為A編碼器,作為速度反饋元件,固定在變槳距電機上,且與電機轉子同軸安裝;E2為B編碼器,作為位置反饋元件,安裝在齒輪輸出軸上。
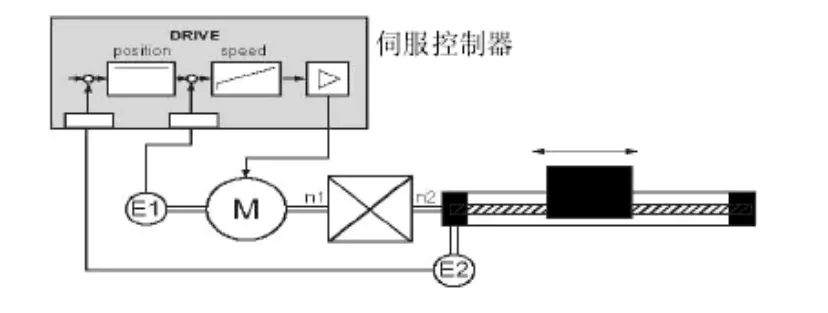
圖8 變槳電機控制圖
對于1.5kW風機的變槳系統(tǒng)A/B編碼器均采用12位多圈絕對值編碼器,每圈脈沖數(shù)為212=4096 P/R,即一圈可記錄4096個絕對位置,有效地提高了變槳電機轉子轉動角度的測量精度。利用所設計的光電轉換電路將編碼器的光電檢測信號放大、整形,輸出的方波信號用于定位控制。編碼器輸出信號是多位輸出型,變槳系統(tǒng)的A/B編碼器與伺服控制器接口采用所設計的數(shù)據(jù)接口及協(xié)議轉換裝置可獲得并行輸出、串行輸出和總線型輸出。從而達到對變槳系統(tǒng)的精確位置和角度控制,實現(xiàn)快速跟蹤。
5 結束語
所設計的多圈絕對值編碼器具有結構簡單、精度高、慣量小、穩(wěn)定性好、抗干擾能力強、接口豐富、直接輸出數(shù)字量形式的絕對位置信號與控制單元連接方便等特點。通過實際應用,驗證了信息傳遞的可靠性,對位置和角度控制的準確性和實時性,將廣泛應用于中小功率伺服系統(tǒng)中。同時,基于DSP的多協(xié)議轉換與接口裝置的設計方法,可以作為標準化設計手段,針對不同接口協(xié)議的系統(tǒng),只需進行相應的設置,有效地拓展了其應用領域。
[1]欒海英,劉學軍.基于CANopen協(xié)議絕對值光電編碼器的伺服位置控制的研究[J].制造業(yè)自動化,2013,35(9):151-153.
[2]羅長洲,陳良益,孫巖,等.一種新型光學編碼器[J].光學精密工程,2003,11(1):104-108.
[3]趙志巍.一種絕對式三軸聯(lián)動多圈編碼器的研制[J].長春理工大學學報(自然科學版),2009,32(1): 8-10.
[4]盛向偉.總線式多圈絕對值編碼器在頂桿小車位置控制系統(tǒng)中的應用[J].機械管理開發(fā),2009,24(1):98-99.
[5]羅揚.解析編碼器在風電控制系統(tǒng)中的應用[J].機械,2009,36:15-19.
[6]孫鶴旭,梁濤,云利軍.Profibus現(xiàn)場總線控制系統(tǒng)的設計與開發(fā)[M].北京:國防工業(yè)出版社,2007:162-166.
[7]宋建,瞿金平.基于Modbus協(xié)議的PCC與觸摸屏串口通信的實現(xiàn)[J].機電一體化,2007,(2):69-73.
[8]劉和平,嚴利平,張學鋒,等.TMS320LF240x DSP結構、原理及應用[M].北京航空航天大學出版社,2002:207-221.
[9]劉泉,盧新然,輕量化絕對式多圈光電編碼器研究[J].半導體光電,2013,34(4):588-590.
[10]杜雪珍.基于CANopen協(xié)議的多圈絕對值光電編碼器的設計[J].電子質量,2013,1:29-32.
A new multi-bus absolute encoder used in wind power generation system
BU Shu-po,MENG Gui-fang,CHENG Lei
絕對值編碼器在工業(yè)生產(chǎn)中用于檢測角度、位置、速度和加速度。本文設計了一種只需單個高精度多碼道碼盤的多圈絕對值編碼器,減少了一個多碼道碼盤,簡化了機械設計難度。同時又設計了基于DSP芯片的數(shù)據(jù)轉換與接口裝置,擴展了其應用場合,使其適應不同現(xiàn)場總線的工業(yè)應用領域。通過在風電系統(tǒng)中的實際應用,實現(xiàn)了對風電控制系統(tǒng)變槳電機轉子旋轉速度和位置的精確測量和控制。
多圈絕對值編碼器;DSP;協(xié)議轉換;現(xiàn)場總線;變槳距系統(tǒng)
卜樹坡(1963 -),男,哈爾濱人,教授級高級工程師,主要研究方向為控制工程技術。
TH137
A
1009-0134(2014)06(上)-0124-04
10.3969/j.issn.1009-0134.2014.06(上).36
2014-02-10
蘇州市科學技術局應用基礎研究計劃項目(SYG201248)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
