基于神經網絡—遺傳算法的雙層隔振系統復合振動控制
2014-05-16 08:45:34崔明月劉旭焱劉紅釗蔣華龍
實驗室研究與探索 2014年7期
崔明月, 劉旭焱, 劉紅釗, 蔣華龍
(1.南陽師范學院 物理與電子工程學院,河南 南陽 471063;2.重慶大學自動化學院,重慶 400044)
0 引言
雙層隔振系統結構簡單,易于實現,在噪聲與振動控制領域中有著廣泛應用。雙層隔振裝置能夠顯著降低機械設備振動向外界的傳遞,是隔離振動和結構噪聲的有效措施。然而,傳統被動式的隔振方式對于低頻振動,尤其是雙層隔振裝置自身固有頻率附近的振動,難以進行有效隔離[1]。主動振動控制需外界供給能量,它是利用外界能量產生控制振動所需要的力或運動[2]。這種控制效果較好,原結構改變不大,調整也方便。目前,在阻振、吸振和隔振領域,均已開展了相應的主動控制技術研究[1,3-4]。
各國學者在振動主動控制領域展開了廣泛的研究,取得了顯著的成果。Yagiz[5]針對7自由度汽車主動懸架的控制問題,運用反步控制策略設計了振動控制器。Rodriguez等[6]針對包含壓電制動器的阻尼減振系統,基于微分平坦理論設計前饋控制律。經過各國學者的努力,振動主動控制技術在土木工程、航空航天以及車輛工程等領域均得到了廣泛應用。然而,現有的振動主動控制通常只集中在削減有限模態的振動,并基于理想化的數學模型,減振效果并不十分理想。文獻[7-8]用自適應控制理論進行主動控制研究,運用最小誤差均方算法對系統誤差通道進行在線辨識,取得了一定的控制效果。遺憾的是,該算法是以線性定常系統模型為基礎。
隨著神經網絡理論研究的不斷進展,許多基于神經網絡的非線性控制策略被國內外學者先后提出,并在振動工程中得到成功應用[9-11]。遺傳算法(Genetic Algorithm,GA)是一種基于自然的選擇與進化機制的功能強大的隨機搜索算法[12],GA的操作不需要規劃對象的先驗知識,只需要計算個體的適應度值,使得該算法具有某些獨到的優點,有學者曾應用于結構振動控制問題[13-14],取得了很好效果。但是,標準遺傳算法存在收斂速度慢,易于早熟等問題,影響了遺傳算法控制器的實時性與準確性。
鑒于此,針對實際雙層隔振系統參數時變,不易建模的特性,本文提出一種神經網絡與遺傳算法相結合的復合控制策略應用于雙層隔振系統,構造了一種有源振動控制系統。運用三層BP神經網絡作為辨識器,單純形與標準GA相結合的改進遺傳算法作為控制器,并進行了仿真分析,結果表明神經網絡—遺傳算法復合控制策略在雙層隔振系統主動控制中的應用具有一定的可行性。
1 雙層隔振裝置數學模型
為了使問題簡化,在此只考慮豎直方向的振動,則雙層隔振系統可簡化為一個兩自由度的彈簧-阻尼-質量系統,如圖1所示。選取隔振對象與中間塊質量坐標分別為x1和x2,由牛頓定律可得雙層隔振系統的振動方程[3]:
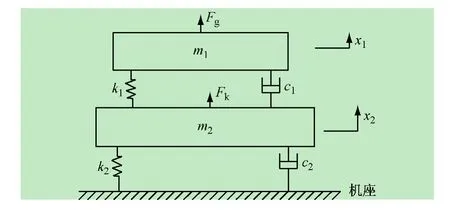
圖1 雙層隔振系統模型
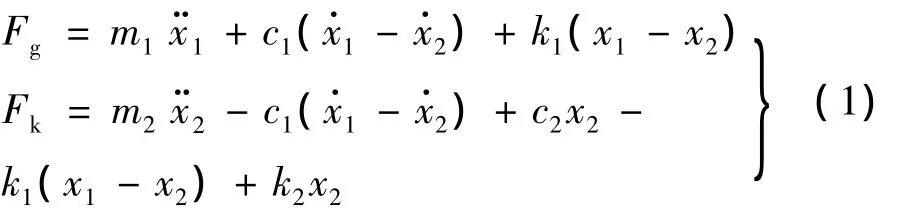
式中:m1為隔振對象的質量;m2為中間塊質量;c1和c2分別為上下層隔振器阻尼系數;k1和k2分別為上下層被動隔振器的剛度系數;Fg為隔振對象工作時產生的豎直方向振動激擾力;Fk表示控制器作用力。
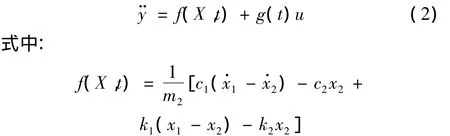
g(t)=1/m2,系統參數 m1,m2,k1,k2,c1,c2是時變的。
由于系統(2)中的f(X,t),g(t)是時變未知的,因此不能直接利用式(2)進行控制器的設計。首先要對式(2)所映射的系統輸出y與控制輸入u之間的關系進行辨識。
2 雙層隔振系統辨識
對隔振系統辨識的目的是尋找中間質量塊位移x2與豎直方向外作用力Fk的變化之間的關系,令外激擾力Fg=0進行系統辨識。雙層隔振系統屬于慣性系統,因此此刻輸出不僅與當前刻的輸入有關,也與前面時刻的輸入有關,取當前時刻以及前m-1時刻的Fk作為網絡的輸入,如圖2所示。
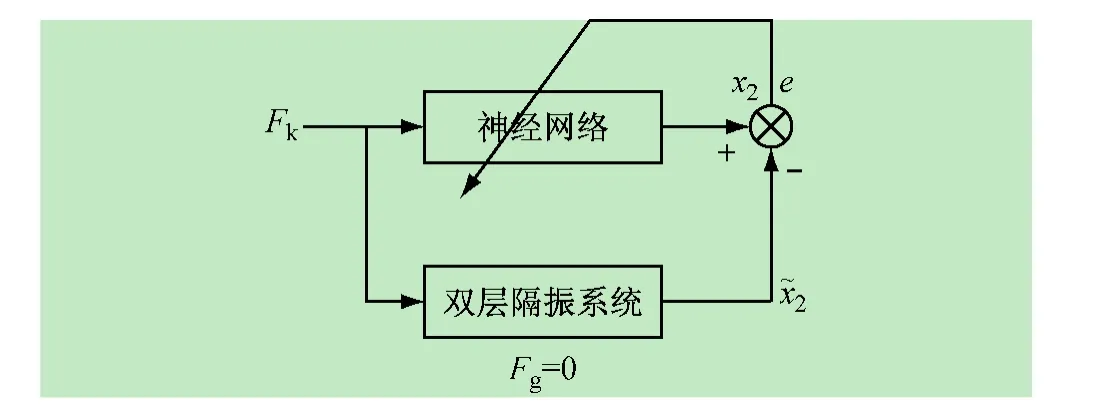
圖2 隔振系統辨識器結構
2.1 神經網絡權值調整算法
若輸入層取為

則中間層輸入為

式中,Wji為輸入層第i個神經元與中間層第j個神經元之間的連接權值。

式中,Wj表示輸出層神經元與中間層第j個神經元之間的連接權值,激活函數取為y=x,則隔振系統中間塊質量位移為


式中:x2與分別為神經網絡辨識器與隔振系統中間質量塊位移輸出;Wji(k+1)為神經網絡權值Wji的k+1時刻的更新值;μ為學習速率。
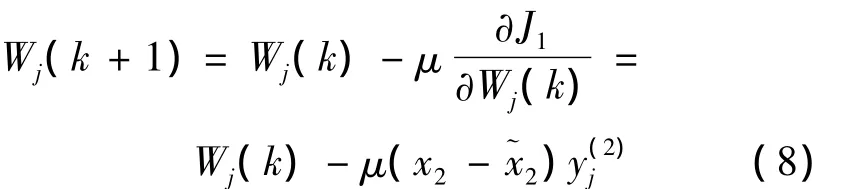
式中,Wj(k+1)為神經網絡權值Wj的k+1時刻的更新值。
2.2 學習速率的自適應調整
傳統的方法,學習速率μ的選擇靠經驗選擇,如果選擇太小,收斂速度慢,若選擇過大,則導致振蕩甚至發散,針對此問題,下面給出一種學習速率μ自適應調整算法:

式(8)中的學習速率μ可以直接應用式(9)計算,式(7)中的μ也可以應用式(9)計算,但是此時

3 控制器的設計
3.1 標準遺傳算法的改進
標準遺傳算法局部尋優能力差,又易產生早熟,搜索后期往往在最優解附近反復進行,不能得到高精度的最優解[15]。而單純形法是一種直接搜索方法,它具有很強的局部搜索能力,但是必須在給定合適的初始單純形條件下,才能快速準確地收斂到初始值附近的最優解。
鑒于此,在常規遺傳算法的基礎上,提出了一種混合遺傳算法,即在執行交叉和變異等隨機性操作后,以一定的概率選擇當前種群中的部分優秀個體,以這些個體為初始值,執行若干步單純形搜索,來強化優秀個體,提高搜索效率,同時也保留了種群的個體差異性,不影響全局搜索的性能。在迭代過程中,當代價函數的適應度小于某一誤差時,將取這一代種群中的最優個體作為初始值,只采用單純形算法進行局部尋優,從而消除了遺傳算法在局部搜索時的不利因素,可用更少的計算量得到問題的最優解。
3.2 神經網絡控制系統的設計
系統辨識神經網絡采用離線學習方式。令Fg為零,Fk采用典型的不同頻率正弦信號復合,學習達到一定要求后,將權值Wji及Wj固定,在實時控制過程中不再調節。
在此,利用遺傳算法在線計算施加于隔振系統中間質量塊上的控制力Fk。根據第2節的研究結果,先利用BP神經網絡對雙層隔振結構進行辨識,再利用訓練好的神經網絡代替雙層隔振結構進行動力分析。遺傳算法—神經網絡結構控制系統如圖3所示。該控制系統充分發揮遺傳算法控制器與神經網絡辨識器各自的優點,達到了無模型實時控制的目的。
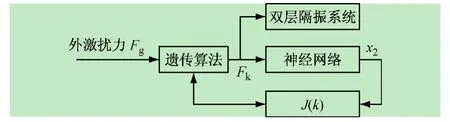
圖3 神經網絡控制系統
3.2.1 編碼方式
要通過遺傳算法尋求作用于中間質量塊的最佳控制力Fk,首先就要對控制力進行編碼組成染色體。因為在實際雙層隔振結構中安裝實施控制的執行器不太多,在此采用簡單的二進制編碼。
如果控制力Fk有其變化范圍,用二進制字符串表示每個控制力,則控制力字符串表示值和實際控制力之間的關系如下:

其中:bin(L)為一由L位字符串所表示的二進制整數;[Fkmin,Fkmax]為控制力Fk的變化范圍。對控制力Fk進行編碼,連接起來就組成了染色體。
控制目標函數取為:

3.2.2 交叉、變異概率的自適應選擇
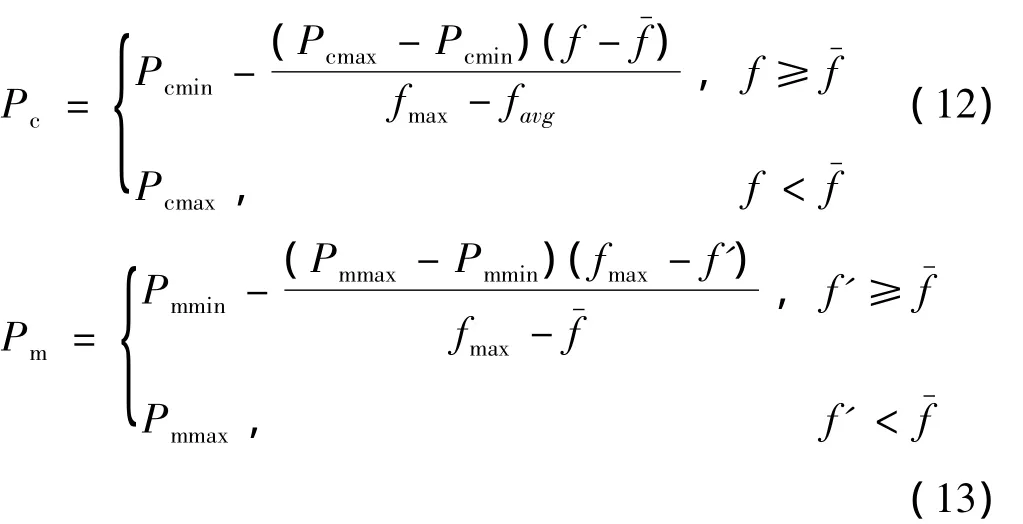
標準遺傳算法中,由于交叉概率與變異概率是固定不變的,易出現過早熟現象而僅得到局部最優解。因此本文采用自適應的交叉概率Pc和變異概率Pm。Pc與Pm能夠隨著適應度大小進行自適應調整:
3.2.3 遺傳算法控制器的工作過程
在算法的開始階段主要利用遺傳算法的全局尋優的能力,并以一定的概率對某些優秀個體進行單純形運算,提高搜索速度,當適應度小于允許誤差時,就選擇該子代中的最優個體進行單純形尋優,最后輸出結果。
從第一個采樣時刻k=1開始,根據外激擾力Fg計算控制力實施控制的具體流程如圖4所示。
將混合遺傳算法控制器計算的控制力施加于雙層隔振結構,進行下一時刻(k+1時刻)的計算,重復圖4所述步驟。
4 數值仿真
雙層隔振系統各部分仿真參數如下:m1=105.42(kg),m2(t)=50+9sin t(kg),k1=5.7 MN/m,k2=1.90 MN/m,阻尼器的系數 c1(t)=0.1+0.05e-0.1t(N/(m·s-1)),c2=0.1(N/(m·s-1))。
4.1 雙層隔振系統的特性辨識仿真
辨識系統輸入信號選為

經反復訓練,辨識神經網絡采用16-8-1(分別表示輸入層、中間層與輸出層神經元的個數)型,學習因子μ(k)初始值取0.1。辨識結果如圖5所示。由圖5可以看出,訓練后神經網絡的誤差能夠達到預先設定的目標值,神經網絡辨識器的輸出較好地擬合了雙層隔振結構的動態響應曲線。神經網絡的輸入—輸出之間的關系基本上能夠反映出雙層隔振系統控制力與中間質量位移之間的動態變化趨勢。
4.2 雙層隔振系統振動控制仿真
遺傳算法控制器參數選取如下:初始群體隨機產生;選擇策略采用適應度比例法,即選擇概率按照轉輪法進行調整;交叉概率Pc按式(12)進行自適應調整,采用雙點交叉策略;自適應變異概率Pm按式(13)進行調整;停止準則為連續80代目標函數值不變。
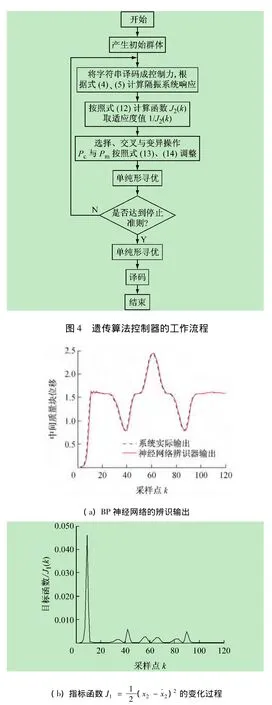
圖5 系統特性辨識結果
4.2.1 持續激勵下的主動控制仿真
現實中的外界激勵可由不同頻率的激勵信號疊合而成[16],為了考察不同頻率的持續外界激勵對雙層隔振系統減振效果的影響,分別以頻率為2、4和10 Hz,幅值為0.1 m的正弦信號作為外激勵信號進行仿真,可得中間質量塊m2的位移響應曲線,如圖6所示。
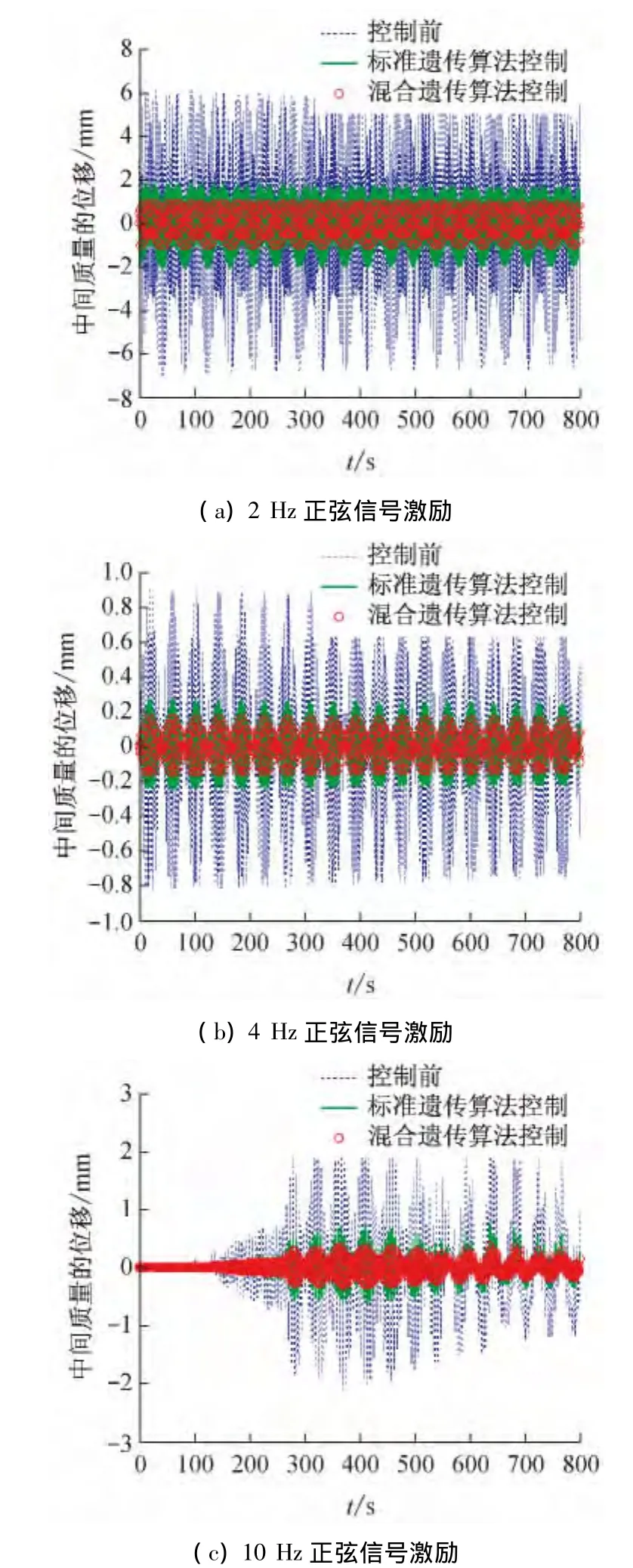
圖6 中間質量塊的位移響應
從圖6中的中間質量塊m2的振動位移響應,可以發現在外部激勵信號頻率分別為2、4、10 Hz的情況下,在激勵頻率處采用神經網絡—標準遺傳算法復合控制時振動位移的幅值分別是雙層被動隔振時的30%、30%、50%,而采用神經網絡—混合遺傳算法復合控制策略時振動位移的幅值分別是雙層被動隔振時的15%、18%、15%,這說明采用神經網絡-混合遺傳算法復合控制策略后的雙層主動隔振系統具有更加良好的隔振效果。但是,激勵信號的頻率對隔振效果有較大的影響,隨著激勵信號的頻率的增加,雙層有源隔振系統的減震效果變差。這主要是遺傳算法控制器的實時性引起的,因此尋求收斂速度更快,更精確的遺傳算法可以在一定程度上解決這一問題。
需要指出的是,這種有源控制方法并未完全解決高頻部分的控制問題,高頻振動部分可考慮由被動隔振部分予以吸收。
4.2.2 初始擾動下的瞬態振動控制仿真
由振動力學的知識可知,現實的振動多為自由振動,即激勵消失后系統所作的振動,反映的是系統關于振動的固有屬性[13]。為此,需要考察瞬態響應時雙層隔振系統的減振效果。在瞬態響應分析中,控制器參數保持不變,對雙層隔振系統的施加一個激擾力Fg作用于上層質量塊使中間質量塊產生一個5 cm的初始位移,然后釋放,圖7是瞬間激擾力作用下運用神經網絡—遺傳算法復合振動控制策略的減振效果。
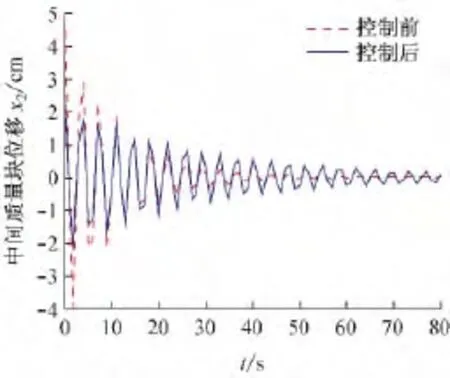
圖7 瞬間激擾力作用下的減振效果
本文所提出的主動控制算法在實際應用中無論對外加的瞬間激擾力與持續激擾力的作用都具有較好的減振效果。這為該減振控制算法在工程實際中的應用提供了一種思路,即不需要建立雙層隔振系統的動態模型,神經網絡辨識器的學習和遺傳算法在線控制可同時在線進行,實現隔振系統的無模型控制。
3 結語
為了提高系統參數時變雙層隔振系統的振動控制效果,提出了將遺傳算法與神經網絡應用于雙層隔振系統有源控制的新方法。該方法利用改進的混合遺傳算法在線計算控制力,利用神經網絡模擬隔振系統的動力特性,離線訓練后代替隔振系統進行動力分析。仿真結果表明這種神經網絡—遺傳算法的復合有源振動控制策略是行之有效的。
(References):
[1] 楊鐵軍,顧仲權,劉志剛,等.雙層隔振系統耦合振動主動控制實驗研究[J].振動工程學報,2003,16(2):149-152.
YANG Tie-jun,GU Zhong-quan,LIU Zhi-gang,et al.Experimen tal Research on Active Control of Coupled Vibration for a Two-Stage Isolation System[J].Journal of Vibration Engineering,2003,16(2):149-152.
[2] 顧仲權,馬扣根,陳衛東.振動主動控制[M].北京:國防工業出版社,1997.
[3] 高宏偉,羅 軍,賈建援.雙層隔振系統主動控制的建模與仿真[J].機械科學與技術,2005,24(11):1340-1342.
GAO Hong-wei,LUO Jun,JIA Jian-yuan.Modeling and Simulation of Active Control of Two-layer Vibration Isolation System[J].Mechanical Science and Technology,2005,24(11):1340-1342.
[4] 鐘民軍,胡世峰,史鐵林等.雙層混合隔振系統的CMAC和PID復合控制研究[J].中國機械工程,2008,19(13):1547-1551.
ZHONG Min-jun, HU Shi-feng, SHITie-lin. Studyonthe Compound Control of CMAC and PID to the Hybrid Two Stage Vibration Isolation System[J].China Mechanical Engineering,2008,19(13):1547-1551.
[5] N.Yagiz,Y.Hacioglu.Backstepping control of a vehicle with active suspensions[J].Control Engineer Practice,2008,16(12):1457-1467.
[6] J.M. Rodriguez-Fortun, J. Orusetc. Flatness-Based Active Vibration Control for Piezoelectric Actuators[J].IEEE/ASME Transactions on Mechatronics,2013,18(1):221-229.
[7] 楊鐵軍,劉志剛,張文平,等.基于x-RLMS算法的自適應有源隔振技術研究[J].內燃機學報,2001,19(1):92-95.
YANG Tie-jun, LIU Zhi-gang, ZHANG Wen-ping, etal.Investigation in Active Vibration Isolation Based on x-RLMS Algorithm[J].Transactions of CSICE,2001,19(1):92-95.
[8] 魯民月,顧仲權,楊鐵軍.簡化的結構振動自適應前饋控制方法研究[J].振動與沖擊,2005,24(1):98-93.
LU Min-yue,GU Zhong-quan,YANG Tie-jun.Study on Simplified Adaptive Feedforward Control for Vibration Reduction of Structures[J].Joural of Vibration and Shock,2005,24(1):98-93.
[9] 歐進萍,張利芳.模糊神經網絡控制系統優化的實整數混合編碼遺傳算法[J].地震工程與工程振動,2003,23(1):11-17.
OU Jin-ping,ZHANG Li-fang.A genetic algorithm with real integer mixture encoding for optimization of fuzzy neural network control systems[J].Earthquake Engineering and Engineering Vibration,2003,23(1):11-17.
[10] 孫承順,任少云,張建武等.神經網絡控制在柴油機主動隔振中的應用[J].振動工程學報,2003,16(3):311-315.
SUN Cheng-shun,REN Shao-yun,ZHAN Jian-wu.Application of Artificial Neural Network to Active Vibration Control of Diesel Engine[J].Journal of Vibration Engineering,2003,16(3):311-315.
[11] 顏桂云,陳福全,孫炳楠.模糊神經網絡在高層建筑橫風向振動控制中的應用研究[J].振動與沖擊,2007,26(1):69-76.
YAN Gui-yun, CHEN Fu-quan, SUN Bing-nan. Stduyon Application of Fuzzy Neural Network to Active Control of Across Wind Response of Tall Buildings[J].Joural of Vibration and Shock,2007,26(1):69-76.
[12] 周 明,孫樹棟.遺傳算法原理及應用[M].國防工業出版社,1996.
[13] 何玉敖,郭 婷.基于遺傳算法的結構主動控制[J].振動工程學報,1999,12(2):182-187.
HE Yu-ao,GUO Ting.Active Structural Control Based on Genetic Algorithms[J].Journal of Vibration Engineering,1999,12(2):182-187.
[14] 何玉敖,郭 婷.遺傳算法-神經網絡結構控制系統研究[J].振動工程學報,2001,14(2):192-195.
HE Yu-ao,GUO Ting.Study on Structural Active Control by Genetic Algorithm-Neural Network System [J]. JournalofVibration Engineering,2001,14(2):192-195.
[15] 柳建新,童孝忠,李愛勇,等.MT資料反演的一種實數編碼混合遺傳算法[J].中南大學學報(自然科學版),2007,38(1):160-163.
LIU Jian-xin,TONG Xiao-zhong,LI Jian-rong.A Real Coded Hybrid Genetic Algorithm in Magnetotellurk Sounding Data Invesion[J].J Cent South Univ(Science and Technology),2007(1):160-163.
[16] 劉延柱,陳文良,陳立群.振動力學[M].北京:高等教育出版社,1998.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45