基于改進遺傳算法的電力系統動態無功優化研究
2014-05-23 09:27:44黃容容魏金成
電氣技術 2014年10期
黃容容 魏金成 陳 勇
(西華大學電氣工程學院,成都 610039)
電力系統動態無功優化分析是對調度周期內的系統進行實時無功優化,通過調節發電機組的出力、改變變壓器的分接頭、確定合理 的無功 補償 容量和合理的無功 補償 地點等措施來保證系統的電壓水平,最大限度的減少系統的網損,提高供電的經濟性[1]。
針對電力系統動態無功優化問題自身的復雜性:在系統運行過程中,控制設備運行狀態的改變都將引起電網無功功率的重新分配,從而使系統的有功網損也發生相應的變化。必須要尋找一種全局優化算法來對整個電力系統進行全局優化。多年來,國內外的許多學者針對電力系統無功優化的問題,提出了大量的優化算法,諸如粒子群算法[2]、TS 算法、量子進化算法、內點法、模擬退火算法及遺傳算法[3]。遺傳算法魯棒性能強,收斂速度與問題的規模無關且具有廣泛的適應性,省去了傳統優化方法求解過程中的復雜的數學運算。本文將遺傳算法應用于電力系統無功優化的求解,對基本遺傳算法作出相應的改進,以達到能夠快速準確的求出優化最優解。
1 動態無功優化的數學模型
電力系統動態無功優化通常是依照控制設備的動作次數約束將負荷預測得到的梯形圖分成幾個大時段,只有在各個大時段之間控制設備才能動作。這就與控制設備動作次數有限形成了嚴重的矛盾。控制設備在時間和空間上均存在強烈的耦合關系。綜合考慮動作次數和準確性兩方面的因素,本文將系統的日負荷曲線按小時分成24 段,近似認為每段負荷保持不變,這樣就將動態優化轉化成靜態無功優化進行求解,得到全天動態無功優化模型[4]。
動態優化的目標函數:

等式約束條件:
不等式約束條件:
式中,V=[V1,V2,…,V24]T為24 個時段內各母線電壓構成的矩陣;Vt為第t個時段內的NB維母線電壓構成的行矢量;C=[C1,C2,…,C24]T為24 個時段內的所有電容器組構成的矩陣;Ct為第t個時段內的p維補償容量值構成的行矢量;T=[T1,T2,…,T24]T為24 個時段內各有載變壓器的分接頭檔位構成的矩陣;T為第t個時段內的q維檔位值構成的行矢量;QG,t為第t個時段內發電機發出無功構成的行矢量;SC為全天之內所有電容器組的動作總次數;p為系統中電容器的總組數;ST為全天之內所有的有載變壓器的分接頭的動作總次數;q為系統中有載變壓器的總臺數。
2 應用于無功優化的遺傳算法改進
為了遺傳算法更加適合應用于電力系統無功優化分析,本文做了相應的改進。
2.1 編碼的改進
根據無功優化控制變量的連續和離散都有的特點,本文采用混合編碼方式。發電機的機端電壓為連續變量,對其采用實數編碼,實數編碼精度高,便于大范圍搜索,同時實數編碼在運算過程中不存在解碼操作,具有很高的計算精度。有載變壓器的分接頭和無功補償裝置的投切組數均屬于離散變量,對其采用整數編碼[5]。兩類變量均在其自身允許范圍內進行取值。
綜上所述,控制變量的編碼可以用下式表示:
式中,Tt表示有載變壓器的分接頭檔位;VG表示發電機的機端電壓;QC表示無功補償器的容量;i表示所有發電機節點;j表示可調變壓器的數目;k表示所有的無功補償節點數。
采用上述混合編碼方式,使編碼的長度與變量的個數保持一致,不僅很好地克服了二進制編碼串長的缺點,而且很好地保留了實數和整數編碼的優點,進一步提高了遺傳算法在電力系統無功優化中的實用性。
2.2 適應度函數的改進
根據不同的評價要求,遺傳算法適應度函數的設計具有多樣性,為了提高無功優化中遺傳算法的優化的速度和計算結果的精度,在進化的不同階段采取不同的適應函數。
在遺傳進化的早期階段,算法主要是對整體目標的最優區域進行搜索,適應度函數可以設計為

當算法進行到一定階段之后,主要目標是尋求目標函數在滿足約束條件下的最優解,因此,這一階段要淘汰那些不滿足約束條件的個體,表現在適應度函數上就是要增大那些不滿足約束條件個體的懲罰因子,適應度函數可以設計為

通過上述分階段適應度函數進行搜索運算,不斷能夠提高運算的速度,使最優解的精度也得到很大的提高。
2.3 收斂判據的改進
遺傳算法的收斂準則在優化過程也是至關重要的,如果僅僅以遺傳代數作為收斂判據,代數設定過小,就會陷入局部最優而得不到預想的全局最優解;遺傳代數設定太大,那么當最優解在設置的最大遺傳代數之前出現時,就不能保證算法快速收斂而浪費計算時間。針對上述情況,采用最優解最少保持代數np和最大遺傳代數m相結合的收斂準則,在預先設定的最大遺傳代數范圍內,搜索全局最優解,并且當最優解在以后的np次迭代過程保持不變,則輸出該最優解,退出優化過程;如果在m代內沒有搜索到最優解,則就輸出此時的次優解。兩種方法的有效結合,既保證了優化過程的全局性,又克服了單一準則的不足。改進遺傳算法求解無功優化問題如圖1所示。
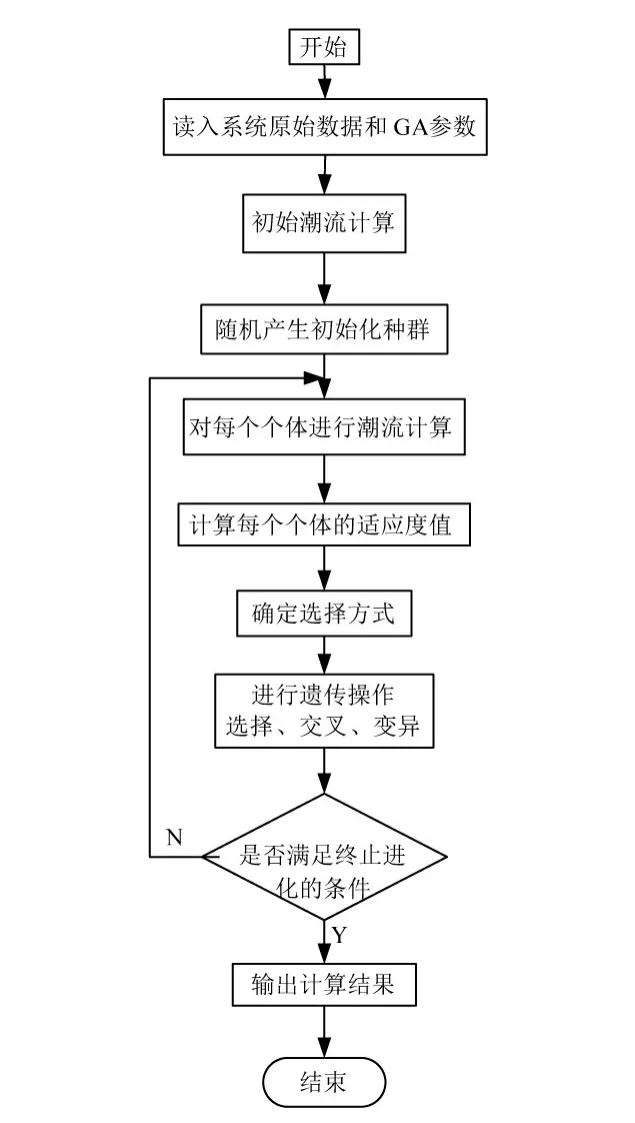
圖1 改進遺傳算法求解無功優化問題流程圖
3 仿真分析
3.1 算法的驗證
為了對改進算法的正確性進行驗證,采用IEEE30節點系統進行仿真。將仿真結果同基本遺傳算法進行比較。
IEEE30節點系統包括6臺發電機(1,2,5,8,11,13),4臺可調變壓器(4-12,6-9,6-10,28-27),2個無功補償節點(10,24),其基本參數可參考文獻[22],種群規模取成50,遺傳代數的最大值取為100。基本算法的參數為:pc=0.65,pm=0.095;本文參數為pc0=0.85,pcstep=0.0015,pcmin=0.08;最優個體的保留代數設置為np=8。變壓器的變比上下限均選為0.90~1.10,調節檔位為1.0±6×2.5%,共分成13檔,限制每次的實際調節檔數小于等于3。發電機機端電壓的上下限取為0.90~1.10p.u.,其他節點取電壓的上下限為0.95~1.05p.u.,除1為平衡節點外,其他發電機節點規定為PV節點,剩余節點規定為PQ節點。
本文為了優化時有足夠的無功備用容量,增加了3 個(15,26,30)無功補償節點,取節點1 為平衡節點,系統有功負荷總和為2.834pu,無功負荷的總和為1.262,SB=100MVA。由于算法具有隨機性,對兩種算法均進行10 次運算,取各自最好的結果進行對比。
兩種算法優化結果的比較見表1。

表1 兩種算法結果比較(p.u.)
從表1可知,改進遺傳算法的有功損耗以及有功損耗降低率都有所提升,計算速度提高了兩倍多,驗證了本文改進遺傳算法的切實可行性。
3.2 動態無功優化實例分析
1)負荷曲線的分段
成都大邑縣電業局2013年3月2日的負荷預測值,利用積分中值定理將負荷預測曲線按一天24h進行分段,將分段負荷曲線進行歸一化處理,得到如圖2所示的柱狀圖,并以IEEE30節點系統的給定負荷作為基準負荷,形成IEEE30節點系統的全天動態無功優化模型。
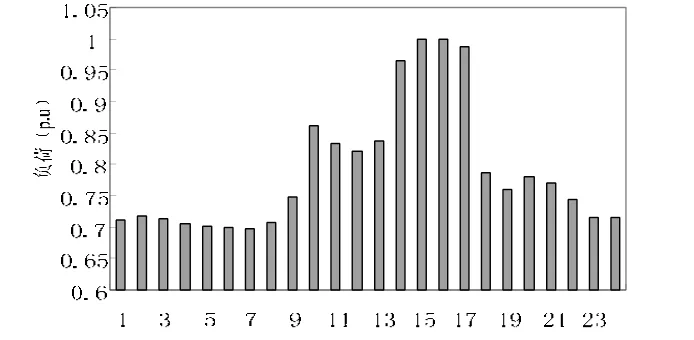
圖2 歸一化分段負荷曲線
2)動態無功優化仿真分析
利用改進的遺傳算法對分段負荷曲線的全天24段分別進行靜態無功優化計算,計算出各控制變量的值,結合各控制變量的動作次數約束分配動作時刻。
本文以15 號節點選出最大的5 個時刻為例來動態演示控制設備的動作時刻變化。如圖3所示。
圖3(a)所示是利用改進的遺傳算法對每一段進行靜態無功優化計算,求得每一段的無功補償容量和控制設備的動作值,考慮控制設備的動作次數 約束,初步確定的控制設備的動作時刻表。
圖3(b)所示是在保證第一段最優的情況下,對后續時段分別進行動態優化,根據各時段控制設備的差值重新調整動作時刻表。
圖3(c)所示是為了滿足電力系統在大負荷是有充足的無功補償量,采用負荷因子對動作時刻表進行調整,重新分配控制設備動作時刻表,達到從整體上對系統進行優化。
對比圖3(a)和圖3(b),電容器組的動作時刻發生了重置,但圖3(b)采用的是在等權重的前提下保證每段網損盡量最小的方法。由于差值變化很小,在負荷很大時無功補償不足,而在負荷較小時無功補償又過剩。為了避免這一缺陷,滿足實際電網運行的要求,本文引入負荷因子,比較圖3(b)和圖3(c),在負荷達到最大值的16時,圖3(c)分配控制設備動作權限,更貼近實際運行的要求。
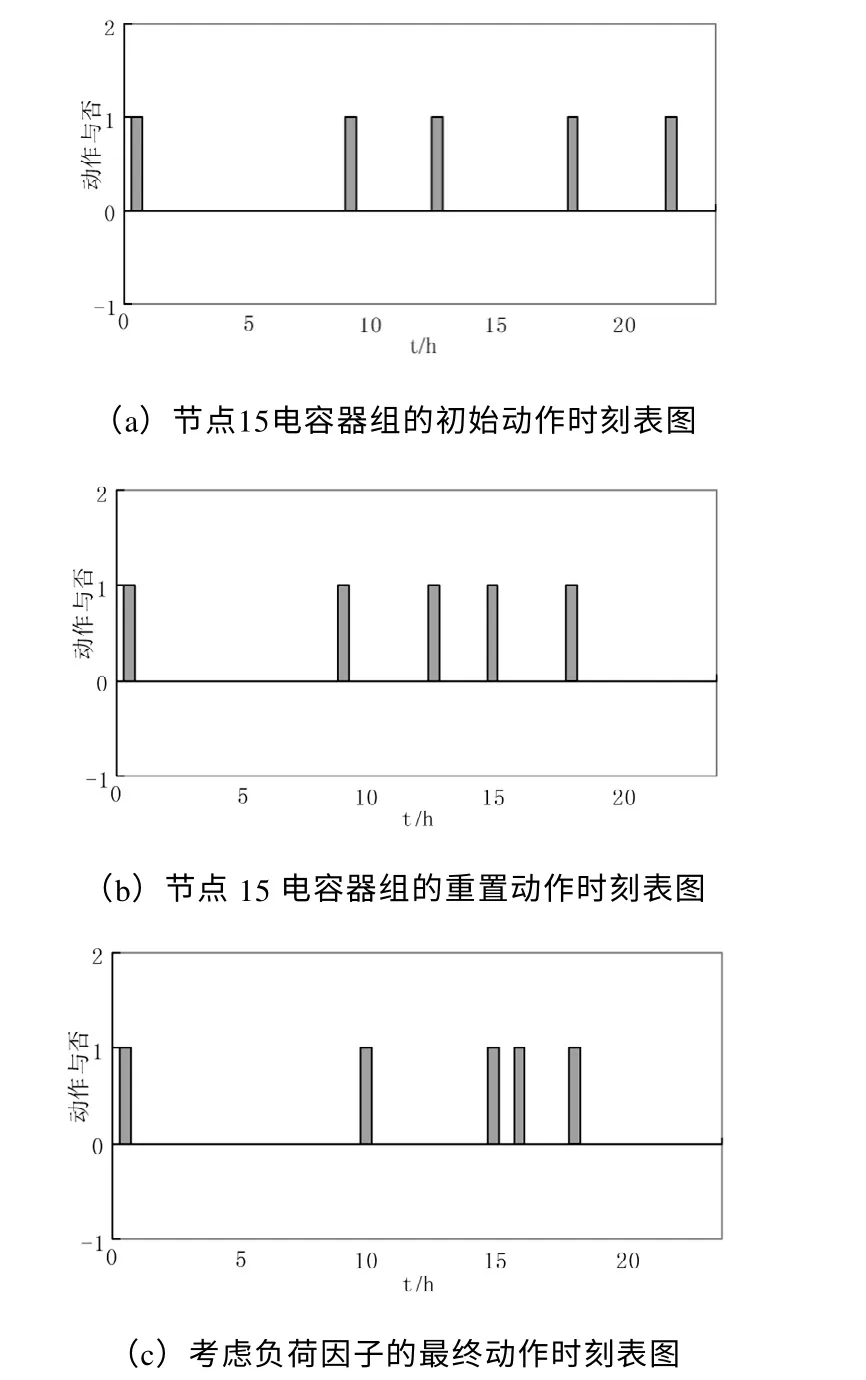
圖3 節點15 電容器組的動作時刻表圖
電力系統動態無功優化分析的前提是保證系統的電壓水平。如圖4所示,給出了發電機機端電壓的變化值。
從上面的圖中可以發現,發電機均在 0.9~1.10p.u 之間,滿足電壓合格率的要求。
如表2所示給出了動態無功優化的網損變化及各時段控制設備的動作數。該動態優化的方法在每時段降低網損的效果明顯,有效地將控制設備動作次數離散化且減少了控制設備的動作次數。
通過對控制設備動作時刻表和發電機機端電壓的分析,驗證本文的算法能夠滿足電網動態無功優化的要求,很好地提高了電壓合格率,合理分配動作設備動作時刻,能夠滿足實時電網優化的要求。 差在0.5Hz時,補償后的電壓和電流的偏差已經基本允許范圍,若誤差再大則不能滿足正常運行的要求,可以得出范圍為±0.5Hz。
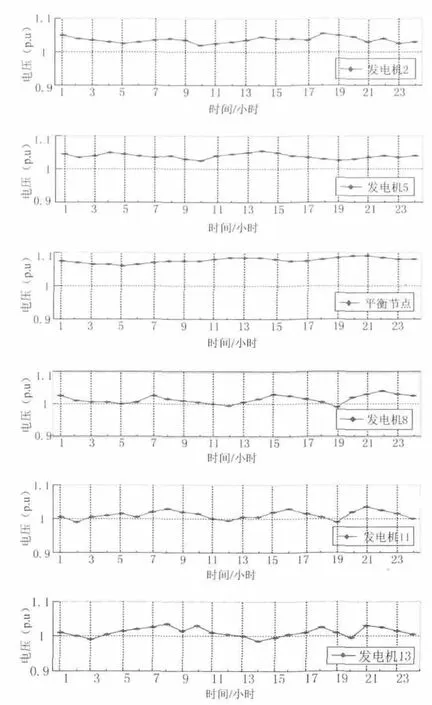
圖4 發電機機端電壓曲線圖
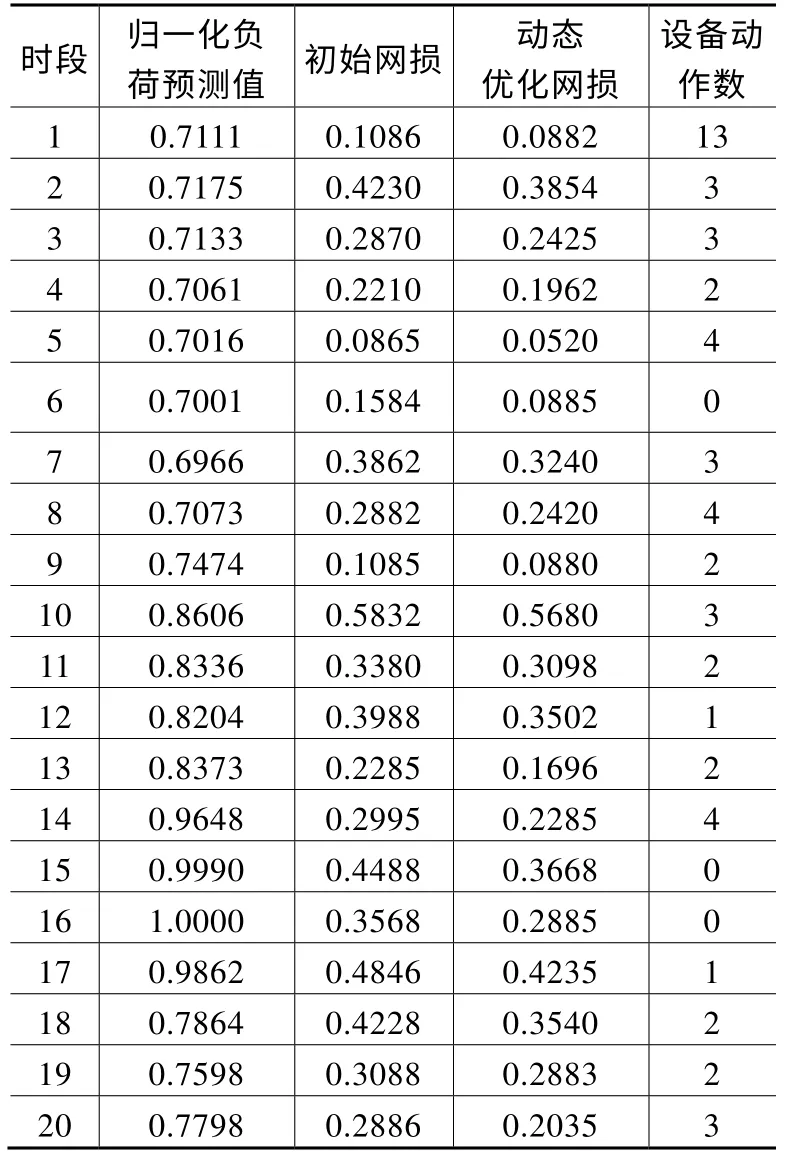
表2 網損變化及設備動作次數
4 結論
本文結合有源濾波的思路,提出了一種新型的鐵磁諧振防治措施,在系統的易發生鐵磁飽和的器件進行實時的監控,對能夠引起飽和的大電流進行有源濾波,使得諧振電路不能形成,在理論上,可以有效防治鐵磁諧振過電壓的產生。使得諧振中必備的鐵心鐵磁飽和的運行狀態進行控制,使之工作在正常的工作狀態,在理論上,本方案是最好的,通過仿真我們也可以看出,我們對補償的精度要求是十分高的,在相位上的精度是±10°,在頻率上式±0.5Hz。所以我們需要進一步根據該思路進行進一步的探索,使得我們的方案在硬件上能夠實現。同時本文利用ATP 仿真,驗證該消諧措施的正確性和存在的問題進行了仿真預判。
根據本課題的特點,還有不少問題有待進一步研究:
1)我們還需要做更多的物理模擬仿真實驗,得到更多的現場數據對我們提出的方案進行佐證。這樣我們對鐵磁諧振的分析才更有說服力。
2)有仿真可以看出,基于有源濾波的主動補償消諧的新思路存在的問題,其補償的精度要求十分高,要是補償控制沒達到要求,防治效果可能適得其反。
[1] 解廣潤.電力系統過電壓[M]. 北京:水利電力出版社,1985.
[2] 平紹勛.電力系統內部過電壓保護及其實例分析[M].北京:中國電力出版社,2004.
[3] 陳維賢.內部過電壓基礎[M].北京:北京電力工業出版社,1981.
[4] 胡成.配電網的鐵磁諧振機理和消諧措施的研究[D].西南交通大學碩士畢業論文,2010.
[5] 周小梅.配電網鐵磁諧振抑制措施的研究與分析[D].華北電力大學碩士畢業論文,2008.
[6] 許志龍,黃建華,王大忠.10kV 電網TV 鐵磁諧振過電壓數字仿真及研究[J].電力自動化設備,2001(2).
[7] 周浩,余宇紅,張利庭,等.自動跟蹤補償消弧線圈裝置的原理和應用[J].電網技術,2005(11).
[8] ZHANG H,XU Y Q,WANG Z P. Research on a new extinction coil operation mode for resonant earthed neutral system.2006 International Conference on Power System Technology.
[9] LI L S,JIANG L P. Study on line detection and fault location with automatic track arc suppression coil device[C]. 2006 International Conference on Power System Technology.
[10] 曾祥君,許瑤,陳博,等.中性點不接地配電網電容電流實時測量新方法[J]. 電力系統自動化學報,2009(2).
[11] 曾祥君,劉張磊,馬洪江,等. 配電網電容電流實時測量技術[J].電力系統自動化,2008,32(3).
[12] WEI X X,JI Y CH,WANG J Z,MU X M. Study on new type orthogonal arc-suppression coil of ground fault protection. 2006 International Conference on Power System Technology.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
電子制作(2018年11期)2018-08-04 03:26:08
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
工業設計(2016年12期)2016-04-16 02:52:00
