H∞控制的電子橫移伺服控制系統設計
2014-05-25 00:34:26聞霞吳龍
自動化儀表 2014年11期
聞霞 吳龍
(三明學院機電工程學院1,福建 三明 365004;三明機械CAD工程研究中心2,福建 三明 365000)
H∞控制的電子橫移伺服控制系統設計
聞霞1,2吳龍1,2
(三明學院機電工程學院1,福建 三明 365004;三明機械CAD工程研究中心2,福建 三明 365000)
針對高速系統中存在的模型不確定性和外部擾動等問題,設計了基于內模原理的H∞高精度控制器。建立的伺服系統的數學模型將混合靈敏度問題轉化為H∞控制問題。仿真結果表明,所提出的控制策略不僅具有較強的魯棒性,而且改善了控制系統的動態性能,能夠滿足高速經編機要求的高速度、高精度、高響應和高頻率啟停的橫移工藝要求。
經編 電子橫移 伺服系統 H∞控制 內模控制
0 引言
經編在紡織工業中具有重要地位,直接關系到服裝、家紡、產業用紡織品等行業的發展[1]。經編產品的生產能力直接由經編裝備的工藝水平決定。隨著現代機械制造、電子和自動控制技術的不斷進步,現代經編裝備正不斷地朝著生產高速化、控制數字化、智能化等方向發展[2]。高速經編機電子橫移系統對主軸參數信號的跟隨性、抗干擾性能要求苛刻,當前適用于高速經編電子橫移系統的軟/硬件設計理論、技術仍在探索階段[3-10],沒有徹底突破,還有待深入、系統地研究。伺服控制器是經編機電子橫移系統的核心環節,所以對面向橫移系統的伺服控制器進行設計和改進顯得尤為重要。本文給出了一種基于內模原理的高精度電子橫移伺服系統的H∞控制算法,并通過仿真分析驗證了算法的有效性。
1 電子橫移系統工作原理
由于直線伺服系統價格高昂,目前經編機電子橫移系統主要采用旋轉交流伺服電機驅動梳櫛橫移機構。經編機電子橫移系統主要由控制裝置、驅動裝置、檢測裝置3部分組成[11],其原理如圖1所示。
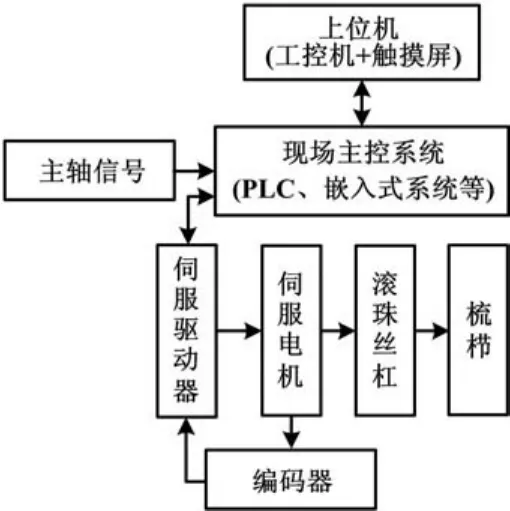
圖1 電子橫移系統原理圖Fig.1 Schematic diagram of the electronic shogging system
①控制裝置:系統采用主(上位機)、從(現場主控系統)兩層分布式控制結構。現場主控系統可以是PLC、各類高性能嵌入式系統等,用于接收經編機主軸信號、計算并向伺服驅動器發送橫移控制信號、加載花型數據以及與上位機通信。
②驅動裝置:由伺服驅動器、伺服電機、滾珠絲杠3部分組成。滾珠絲杠將旋轉電機的旋轉運動轉換成直線運動,使梳櫛實現往復的“停止-運動-停止”間歇式運動。
③檢測裝置:由編碼器構成,用于檢測經編機主軸的位置信號和伺服電機的轉速信號,并反饋到控制系統,以便完成高精度閉環控制。
2 伺服系統的數學模型
伺服系統是用來精確地跟隨或復現某個過程的反饋控制系統[12]。目前,經編機電子橫移系統普遍采用性價比較高的交流伺服系統來驅動梳櫛進行橫移運動。交流伺服系統結構框圖如圖2所示。
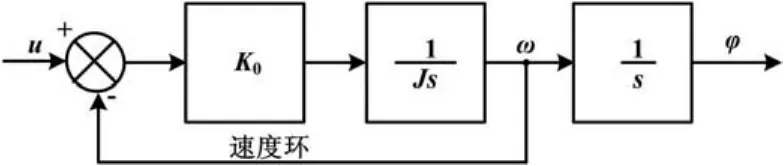
圖2 伺服系統結構框圖Fig.2 Structure of the servo system
圖2中:u為輸入控制信號;ω為電機角速度;φ為輸出信號(旋轉角度);伺服電機慣量J=11.37 Nms2;系統增益K0=136.44 Nms。設x1=ω,y=x2=φ,x= [x1x2]T,則圖2可轉化為圖3所示狀態變量圖。
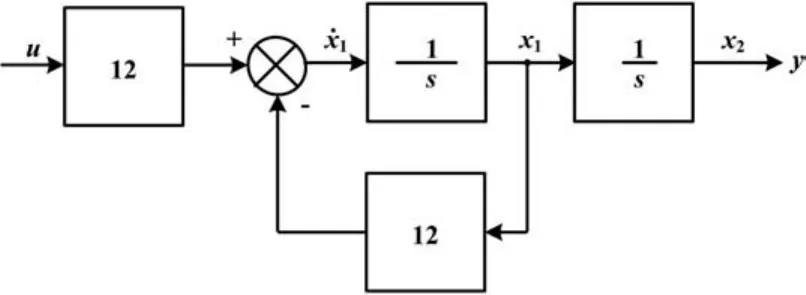
圖3 伺服系統狀態變量圖Fig.3 State variables of servo system
根據圖3得到伺服系統狀態空間表達式為:
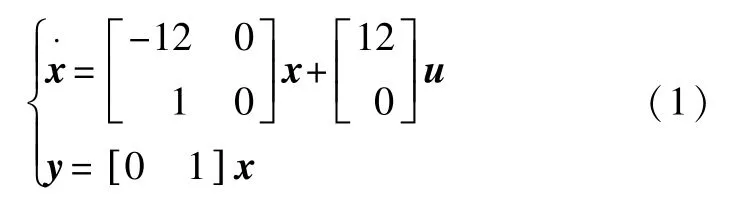
下面介紹基于上述伺服系統模型(1)的狀態空間H∞控制方法。
3 H∞控制器設計
3.1 H∞控制基本原理
H∞控制理論是在H∞空間通過某些性能指標的無窮范數優化而獲得具有魯棒性能的控制器的一種控制理論。它的基本思想是:當對研究對象的數學模型G設計控制器時,由于參數的不確定性與變化性,通過設計控制器K,使得K在穩定被控對象的同時使某一目標函數的H∞范數最小。標準H∞控制結構如圖4所示。圖4中:w為外部輸入信號,一般包括指令(參考)信號,干擾和傳感器噪聲;u為控制信號,同時也是控制器輸出;z為被控輸出信號,通常包括跟蹤誤差、執行機構輸出信號等;y為測量輸出信號,可能是傳感器輸出級指令信號等;G和K分別為廣義被控對象和控制器,前者是系統中給定的部分,后者是需要進行設計的。
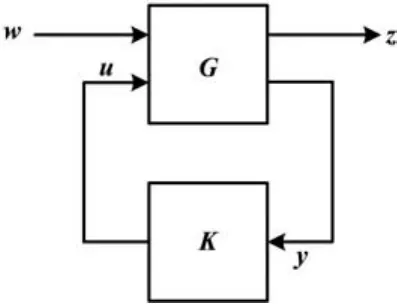
圖4 標準H∞控制結構框圖Fig.4 Structural block diagram of standard H∞control
假設G和K均是用線性時不變系統的傳遞函數矩陣描述,即G(s)和K(s),G的狀態空間實現為:
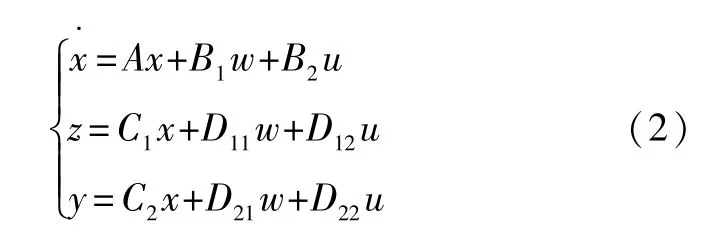
式中:x∈Rn;y∈Rq;w∈Rr;u∈Rp。
相應的傳遞函數矩陣為:
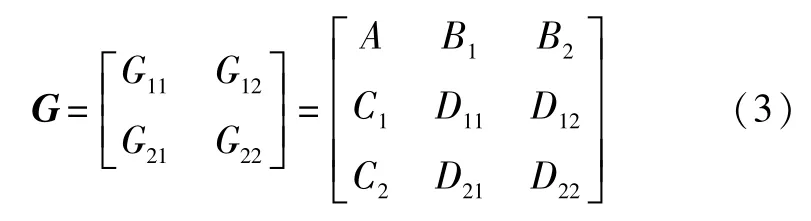
于是,從w到z的閉環傳遞函數為:

H∞最優控制問題可以由定義1描述。
定義1(H∞最優控制問題)對于給定的增廣被控對象G,求反饋控制器K,使得閉環系統內部穩定且‖Tzω‖∞最小,即:

3.2 內模H∞控制器的設計方法
在實際工程中,許多控制問題都可統一于H∞控制問題[13]。本文將混合靈敏度問題轉化為H∞控制問題,采用狀態反饋加內模原理的H∞控制器設計。閉環控制系統框圖如圖5所示。圖5中,G和K分別為控制對象和控制器的傳遞函數;r、e、w和z分別為參考輸入信號、誤差信號、擾動信號和測量輸出信號。
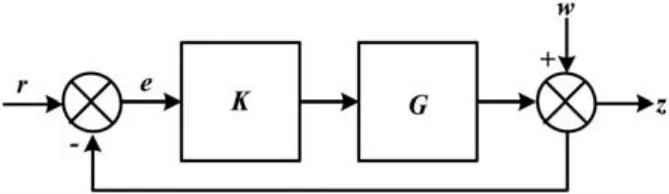
圖5 閉環控制系統框圖Fig.5 Block diagram of closed-loop control system
圖5所示閉環系統的靈敏度函數為S,補靈敏度函數為T。S、T和兩者間的相互關系可表達為:
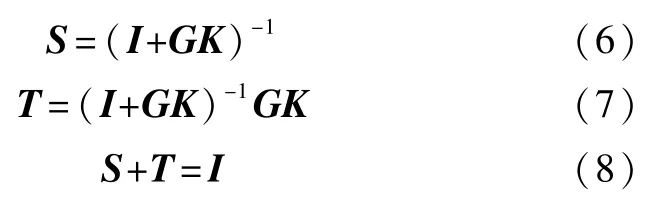
從保證控制對象具有模型不確定性的魯棒穩定性出發,要求補靈敏度函數T越小越好。但是從式(8)可以看出,它與要求抑制擾動信號w對測量輸出信號z的影響相矛盾,這就需要在靈敏度函數S和補靈敏度函數T的選擇上做折衷處理。由于實際控制系統中經常是干擾和受控對象的不確定性同時存在,故求解混合靈敏度控制問題非常有意義。
混合靈敏度方法的核心思想是:閉環系統的性能指標可以通過適當地選擇靈敏度函數的加權函數陣來達到,而適當選擇互補靈敏度函數陣的加權函數可以達到系統的魯棒穩定性能指標。
H∞混合靈敏度控制系統框圖如圖6所示。
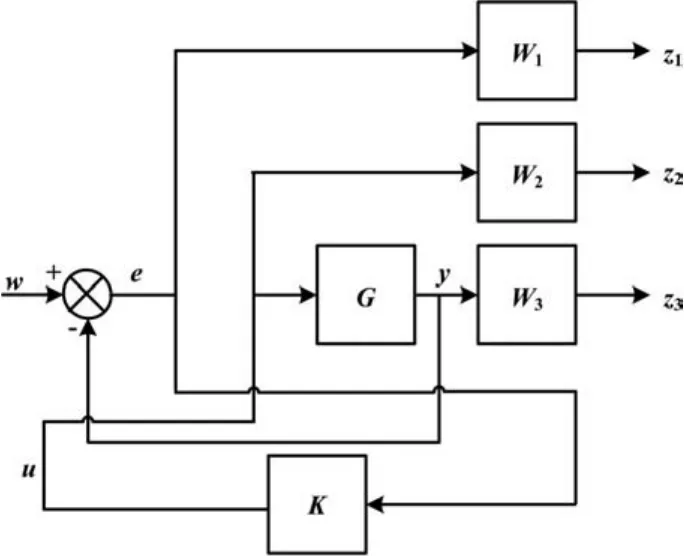
圖6 H∞混合靈敏度控制系統框圖Fig.6 Block diagram of H∞mixed sensitivity control system
圖6中,W1、W2、W3為加權函數,K為控制器。系統的狀態方程可描述為:
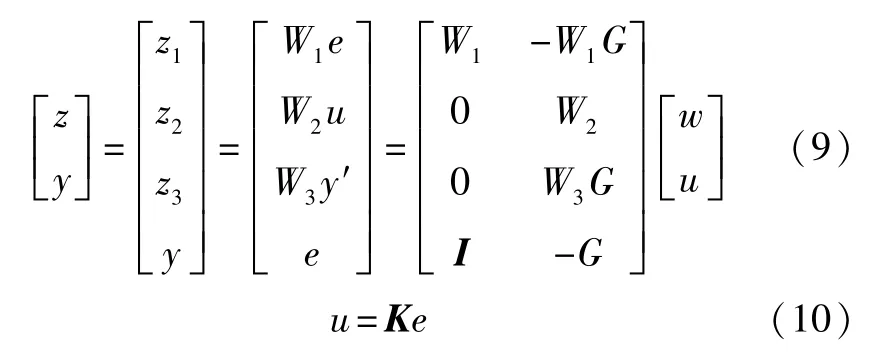
廣義對象及狀態空間表達式為:
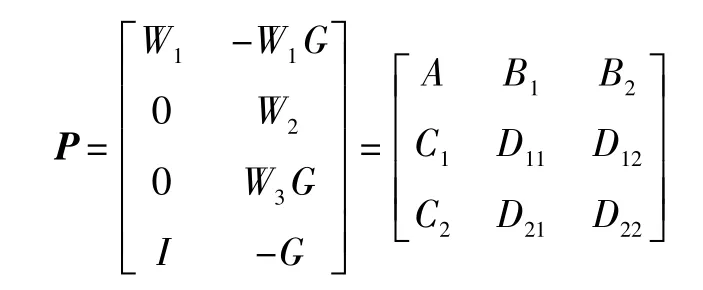
在這種結構下,從w到z的閉環傳遞函數陣為:

式中:S為靈敏度函數;T為補靈敏度函數;R=KS。
‖S‖∞越小,意味著干擾引起的系統輸出信號的能量越小,也即系統抗干擾能力越強;‖T‖∞越小,意味著由控制器輸入的干擾而引起的系統輸出能量越小,也即系統魯棒性能越好。
混合靈敏度控制問題可以轉化為H∞控制問題,即混合靈敏度控制問題就是尋找控制器K、穩定化P,且使得‖Tzw‖∞最小。在實際應用中,需要根據工程實際指定3個加權函數W1、W2和W3。在系統設計時,一般常把W2設置為一個很小的值。為抑制系統低頻段內干擾和模型誤差的影響,應盡量減少S在該頻段內的增益,通過整形S的頻率特性,使其位于某條曲線之下,可得到較好的跟蹤性能。同理,通過整形T的頻率特性,使其位于某條曲線之下,可得到較好的魯棒性能。
內模控制原理是指把外部作用信號的動力學模型植入控制器來構成高精度反饋控制系統的一種設計原理。這個原理指出,任何一個能良好地抵消外部擾動或跟蹤參考輸入信號的反饋控制系統,其反饋回路必須包含一個與外部輸入信號相同的動力學模型。這個內部模型稱為內模。加入內模1/s,引入狀態變量e1= y-r,則基于狀態反饋加內模原理的混合靈敏度H∞控制系統如圖7所示。圖7中,K0為增益。

圖7 加入內模控制后的系統框圖Fig.7 Block diagram of the system with internal model control added
4 仿真結果分析
在本文設計過程中,令加權函數W2=0,得到階躍響應曲線、開環對數頻率特性曲線、奇異值曲線分別如圖8、圖9和圖10所示。從圖8可以看出,加入內模后的H∞閉環控制超調量相對來說大一些,但控制器可以在0.5 s內實現無靜差跟蹤,響應速度快,跟蹤效果良好。從圖9可以看出,加入基于內模的H∞控制校正環節后,可以使開環系統的相頻裕度、幅值裕度均變大,穩定性能變好。截止頻率右移,系統的響應速度加快,抗干擾能力增強。從圖10可知,σ(S)<σ( W1-1),σ(T)<σ( W3-1),設計的內模H∞控制器能夠滿足系統要求。
經過以上分析可知,將加入內模的H∞控制策略應用于電子橫移伺服驅動系統模型(1),實現高精度無靜差位置跟蹤的設計是合理的,伺服系統的性能得到了較大提高。
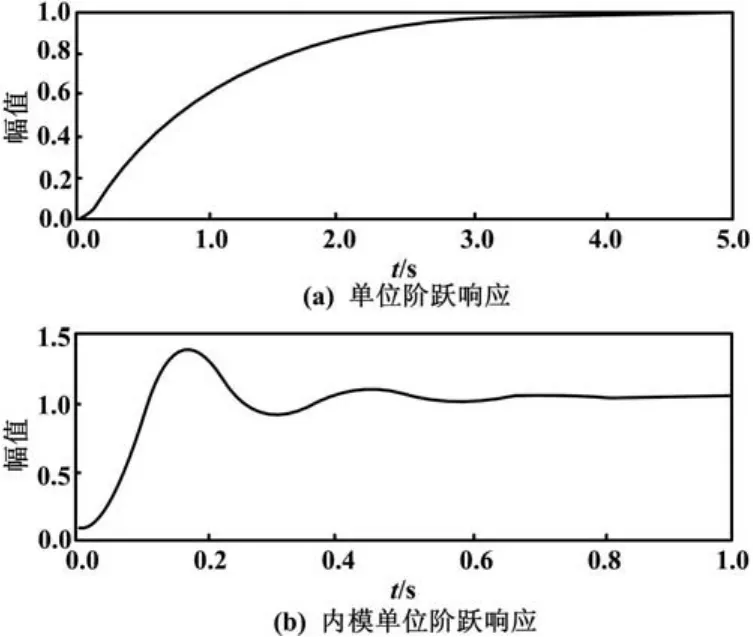
圖8 系統的階躍響應曲線Fig.8 Step response curves of the system
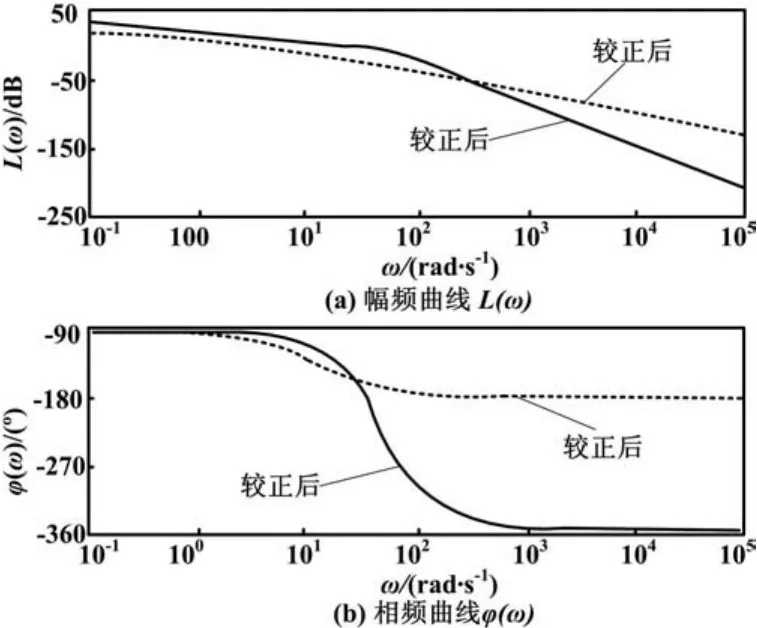
圖9 系統開環對數頻率特性曲線Fig.9 Logarithmic frequency characteristic curves of the open-loop system
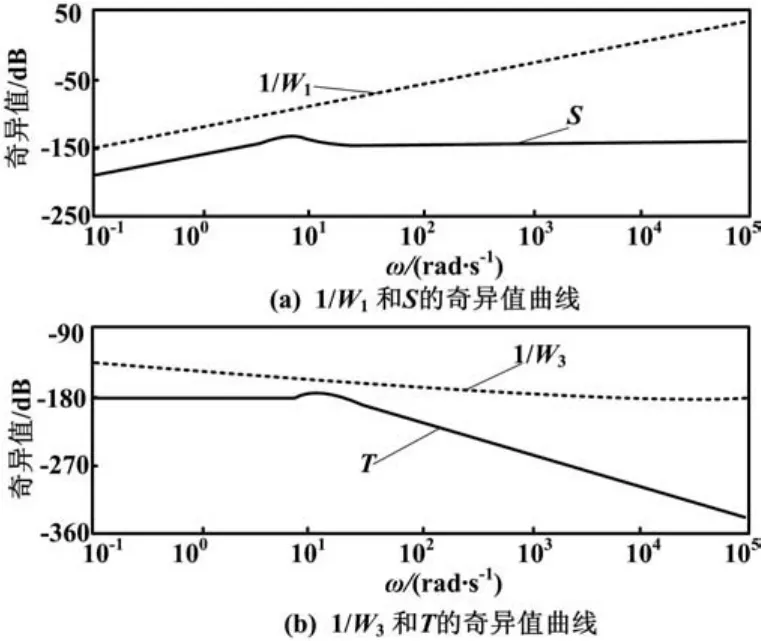
圖10 奇異值曲線Fig.10 Curves of singular values
5 結束語
隨著控制技術的高速發展,各種新的控制理論、控制方法不斷地應用到實踐中。根據經編電子橫移系統的工作原理,本文詳細介紹了一種面向經編機電子橫移伺服驅動系統[14-17]的內模H∞狀態空間高精度控制策略,并在Matlab環境下進行了仿真試驗。通過對試驗結果的詳細分析,證實了所提出的控制算法的有效性和可行性。
[1] 繆旭紅,徐穎.EL型高速經編機的花型設計與產品開發[J].針織工業,2007(12):14-16.
[2] 任雯,胥布工.基于FI-SNAPID算法的經編機多速電子送經系統開發[J].浙江大學學報:工學版,2013,47(10):1712-1721.
[3] 孔震,蔣高明,夏風林.高速經編機電子橫移原理探討[J].針織工業,2007(9):12-14.
[4] 夏風林,蔣高明.基于DSP的經編機電子橫移系統探討[J].針織技術,2009(2):72-74.
[5] 周博,李平,金福江.經編機電子橫移系統的模型參考自適應控制[J].上海電機學院學報,2013,16(3):117-124.
[6] 吳永春.經編機梳櫛電子橫移機構及控制方式的研究[J].機電技術,2011(5):52-54.
[7] 夏風林.基于直線伺服控制的經編電子橫移系統研究[D].無錫:江南大學,2010.
[8] 鄭寶平,蔣高明,夏風林,等.雙PID控制的經編機電子橫移系統設計[J].紡織學報,2013,33(5):135-139.
[9] 殷明躍,夏風林,張琦,等.基于前饋控制的經編機橫移系統高速定位[J].紡織學報,2011,32(11):126-130.
[10] 鄭寶平,蔣高明,夏風林,等.基于轉矩控制模式的經編電子橫移系統設計[J].紡織學報,2012,33(10):122-127,140.
[11] 王利寧.模糊PID控制算法在電動壓力發生器開發中的應用[D].吉林:吉林大學,2010.
[12] 陳鵬展.交流伺服系統控制參數自整定策略研究[D].武漢:華中科技大學,2010.
[13] 褚健,俞立,蘇宏業.魯棒控制理論及應用[M].杭州:浙江大學出版社,1998:49-53.
[14] 鄭澤東,李永東.永磁同步電機伺服控制系統的研究現狀及發展[J].伺服控制,2008(12):20-22.
[15] 樊東,周國榮.永磁同步伺服電機智能控制器的研制與開發[J].計算機測量與控制,2006,14(3):324-326.
[16] 胡存生.變慣量伺服系統智能控制技術研究[D].南京:南京理工大學,2010.
[17] 楊燕波.基于DSP的無刷直流電機三閉環伺服系統的研究[D].上海:東華大學,2009.
Design of the Electronic Shogging Servo Control System Based onH∞Control
Aiming at the model uncertainty and external disturbance existing in the electronic shogging servo system of high speed warp knitting machine,the high precision controller based on internal model principle is designed.The mathematical model of servo system is established; the mixed sensitivity is transformed into H∞control.The result of simulation shows that the proposed control approach not only has strong robustness and can improve the dynamic performance of the control system,this satisfies the requirements of warp knitting machine,including high speed,high accuracy,fast response and frequently startup and shutdown.
Warp knitting Electronic shogging Servo system H∞control Internal model control(IMC)
TP271+.4
A
福建省科技廳高校產學合作科技重大基金資助項目(編號:2011H6023、2012H6018)。
修改稿收到日期:2014-04-17。
聞霞(1980-),女,2007年畢業于新疆大學機械制造及其自動化專業,獲碩士學位,講師;主要從事機械設計制造及其自動化的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16