基于多普勒Chirp-Fourier變換的水下航行器噪聲源定位方法
2014-06-02 04:23:30楊益新吳姚振
電子與信息學報 2014年12期
田 豐 楊益新 吳姚振 楊 龍
?
基于多普勒Chirp-Fourier變換的水下航行器噪聲源定位方法
田 豐 楊益新*吳姚振 楊 龍
(西北工業大學航海學院 西安 710072)
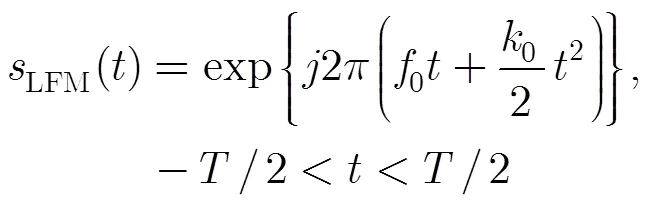
通過對水下航行器輻射噪聲的多普勒特征分析,可以定位線譜噪聲源在航行器上的輻射位置,從而有針對性地采取治理措施。傳統的多普勒分析方法大多在時頻域中進行,難以有效處理同頻聲源的定位問題。該文提出一種基于Chirp-Fourier變換特征的多普勒分析方法,將多普勒信號分解為線性調頻(LFM)子分量的集合,并轉換到頻率-調頻因子構成的2維平面。利用該平面內的多普勒信號分布特征,可以有效抑制同頻聲源之間的相互干擾,進而完成多噪聲源的定位。仿真和海上實驗驗證了該方法的有效性。
水下信息處理;噪聲源定位;水下多普勒信號;Chirp-Fourier變換;頻率-調頻域
1 引言
水下運動航行器的輻射噪聲頻譜由離散的線譜和連續分布的寬帶譜組成。其中的線譜成分主要來源于航行器內部機械設備的低頻往復運動,一般比較穩定而且相對連續譜的強度較高,在水下傳播損失較小,通常攜帶了明顯的航行器個體特征,是水聲檢測和識別的重要信息源[1,2]。因此,需要通過水聲測量方法準確定位低頻線譜噪聲源在航行器表面的輻射部位,以便于有針對性地采取減震降噪措施,從而提高航行器的聲隱身性能。目前采用的水下航行器噪聲源定位方法主要包括通過特性法、方位角估計方法以及多普勒分析方法等。

針對水下航行器同頻輻射噪聲源的定位分辨問題,本文提出了一種基于多普勒Chirp-Fourier變換特征分析的噪聲源定位方法。該方法將多普勒信號由時頻域轉換到頻率-調頻因子構成的2維平面,使多普勒信號分解為多個LFM子分量的組合。通過對多普勒信號的LFM子分量在頻率-調頻平面上分布特征的提取,可以有效抑制聲源之間的相互干擾,并且準確估計各聲源的多普勒參數,進而定位各噪聲源的輻射位置。多噪聲源環境的仿真算例分析表明,該方法對于水下航行器表面的多個同頻或相近頻率聲源的定位分析具有良好的分辨和估計性能。海上實測數據驗證了方法的有效性。
2 測量系統模型

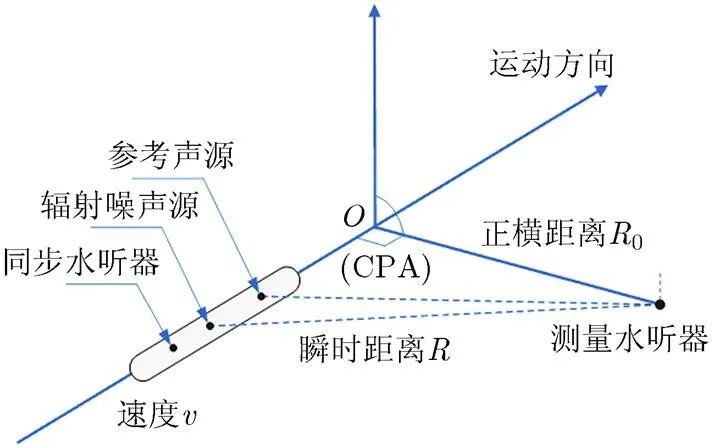
圖1 噪聲源定位測量系統示意圖
由于聲源和接收端之間延時的非線性變化,接收信號產生多普勒效應,可表示為


3 多普勒信號的Chirp-Fourier分解特征
3.1 Chirp-Fourier變換的分解原理
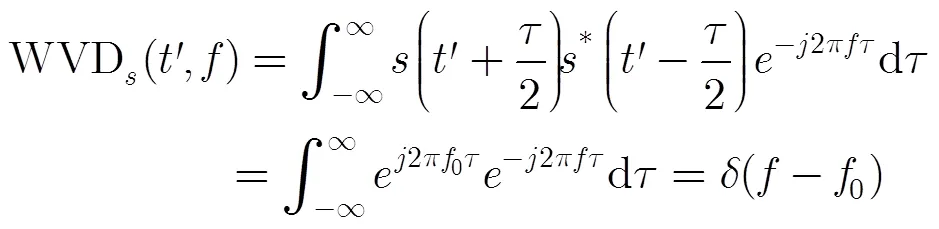
Chirp-Fourier變換(CT)是一種Chirplet基函數參數化時頻分析方法,常用于多線性調頻信號分量參數分析[13],可以表示為



3.2 多普勒信號的Chirp-Fourier分解特性
多普勒信號的CT分解比較復雜,很難直接精確推導其在頻率-調頻面上分布的完整數學表達式。然而多普勒信號中任意時刻的局部能量分布,都是其某部分LFM子分量作用的結果。因此,只需要研究構成中心時刻的那部分LFM子分量的特征,就可以獲得完整的多普勒中心時刻信息,從而達到簡化信號分析的目的。

4 基于多普勒頻率-調頻分布特征的噪聲源定位方法
4.1混合LFM信號的頻率-調頻平面分布特征
多普勒信號中包含了相交的LFM子分量信號,且交點為多普勒中心點。因此,相交的混合LFM信號與多普勒信號在頻率-調頻平面上具有相同分布特征。研究混合LFM信號在頻率-調頻2維平面上的分布規律,提取其中所包含的LFM信號交點信息,也就得到了多普勒信號的頻率-調頻分布特征,從而估計出多普勒信號的中心參數。





圖2 交點位于時間段中點的混合LFM信號


4.2多普勒信號的頻率-調頻平面分布特征


圖3 交點與時間中點不重合的混合LFM信號
4.3同頻噪聲源的多普勒CT分解定位方法

5 仿真性能分析
為了考察算法的聲源定位分辨性能,設置了多噪聲源仿真環境,并與短時傅里葉變換(STFT)和Wigner-Ville分布(WVD)時頻分析方法進行對比。仿真中的統一條件設置為:運動速度3 m/s,正橫距離20 m,水中聲速1500 m/s,信號采集時長80 s,采樣率1 kHz。各仿真中,兩信號CPA分別為32 s和48 s,信號幅度相同,單個信號的信噪比為6 dB。
仿真1 兩個信號頻率存在微弱差異,為50.00 Hz和49.90 Hz。圖5(a)為其STFT處理結果,圖5(b)為WVD的處理結果。這兩種分布均產生了嚴重混疊,不能反映真實的能量分布狀態。圖5(c)為CT分布效果,雖然存在信號間干擾,但是依然能有效分辨信號并提取參數。
仿真2 兩個信號中心頻率完全相同,均為50.00 Hz。各算法處理結果如圖6所示,信號的STFT和WVD出現了嚴重的失真和畸變,而CT分解結果能獲得良好的分辨效果。估計處理結果如表1所示。可以看出,針對同頻聲源形成的窄帶內混疊多普勒信號,CT分解方法具有良好的處理性能,可以有效定位聲源的輻射位置。
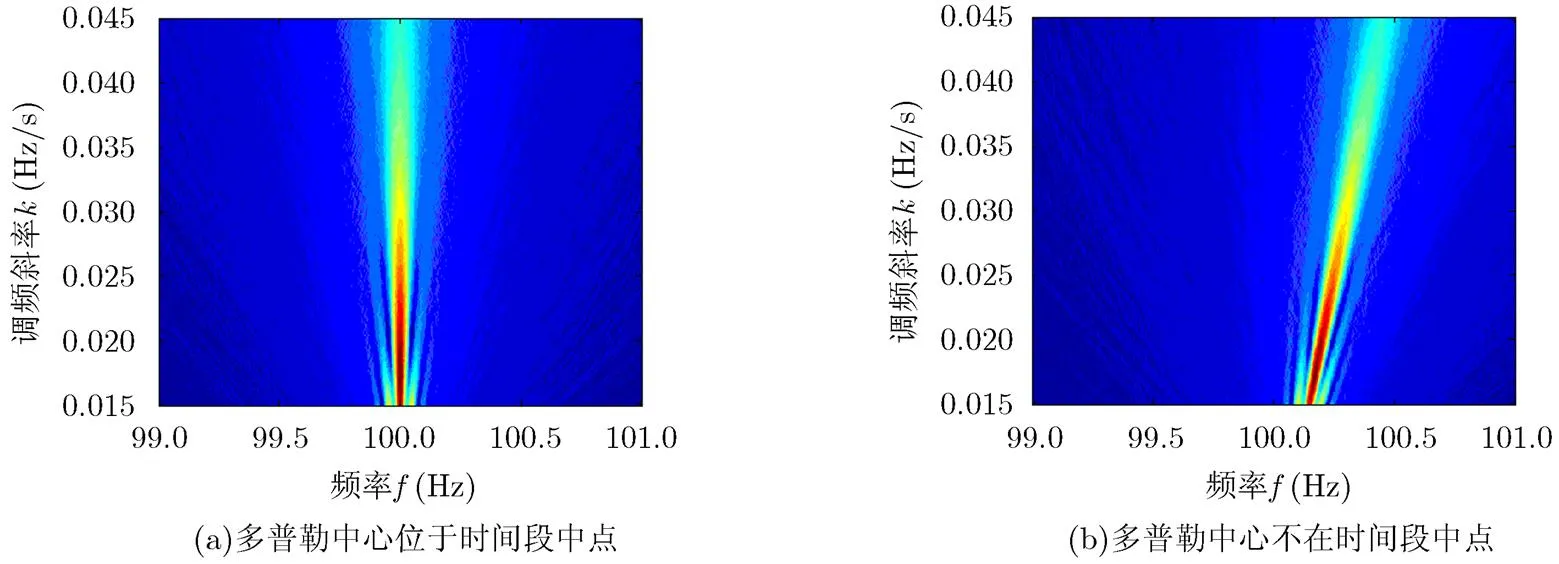
圖4 多普勒信號的CT分布效果

圖5 相近頻率聲源的多普勒分布與處理
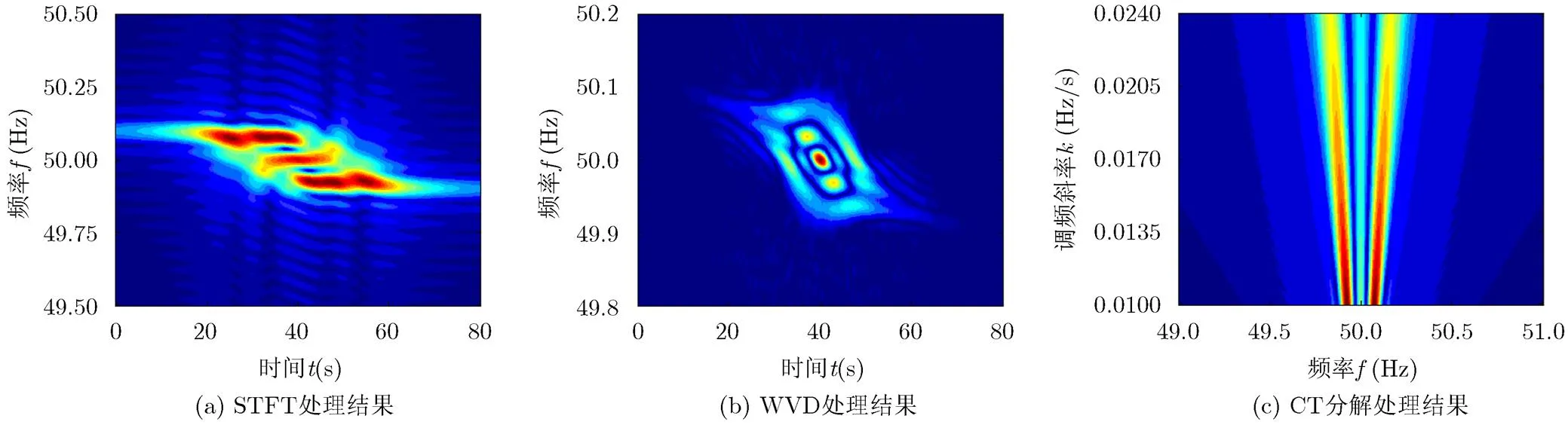
圖6 同頻率聲源的多普勒分布與處理
表1各仿真參組及估計性能對比

仿真組信號頻率(Hz)CPA誤差(s)定位誤差(m) 仿真1信號150.000.170.51 信號249.900.220.66 仿真2信號150.000.431.32 信號250.000.320.96
6 海測數據分析
海上驗證試驗于2012年在大連附近海域進行。接收端水聽器位于水線下10 m。發射平臺布置參照圖1,搭載低頻和高頻發射換能器,作為模擬輻射聲源和參考聲源。兩聲源分別固定于船體中軸線上的兩個可升降支架底部,間距為19.2 m,試驗時均放入水線下6 m。為避免船體諧振,發射信號頻率為55 Hz,采用5 kn航速工況。實測正橫距離為33.9 m,運動速度為2.93 m/s。為了驗證同頻多聲源的處理性能,將采集信號延時8.2 s后與原信號疊加,以模擬距離為24 m的同頻聲源接收效果。對延時疊加后的數據進行處理,如圖7所示。可以看出,STFT和WVD均無法對混疊信號進行有效分辨,而CT能清晰分辨兩個信號,估計結果如表2所示。可以看出,CT變換的頻率-調頻分析方法能有效提取同頻信號的多普勒CPA時刻參數,并且完成各聲源的定位處理。

圖7 實測低頻聲源多普勒信號的處理效果
表2實測聲源的CT處理定位結果

單聲源處理模擬雙聲源處理 信號55 Hz信號55 Hz原始信號55 Hz延時信號 CPA時刻誤差(s)0.250.410.52 定位誤差(m)0.731.191.52
7 結論
本文基于水下目標輻射噪聲中線譜的多普勒頻移特征,提出了一種基于CT的多噪聲源多普勒分析方法,將運動聲源產生的多普勒信號轉換到頻率-調頻因子構成的2維平面,并分解為多個LFM分量的組合。通過多普勒信號在頻率-調頻2維平面內分布特征的提取,可以得到多普勒信號中LFM分量的時頻交點信息,從而估計出聲源的輻射頻率和多普勒CPA時刻,結合測量系統完成對噪聲源的定位。該方法在接收端僅需單個水聽器即可處理,具有良好的實際應用性能。多噪聲源環境的仿真算例分析表明,該方法對于混疊的窄帶多分量多普勒信號具有良好的分辨和估計性能,可有效處理同頻或相近頻率的聲源,具有一定的工程實用價值。最后通過海上實測數據驗證了方法的有效性。
[1] 陳陽, 王自娟, 朱代柱, 等. 一種基于頻率方差加權的線譜目標檢測方法[J]. 聲學學報, 2010, 35(1): 76-80.
[2] Abrahamsen K. The ship as an underwater noise source[C]. Proceedings of Meetings on AcousticsEdinburgh, 2012: 70058-70061.
[3] 高偉, 陳川. 基于輻射噪聲強度和線譜多普勒的目標運動參數估計[J]. 聲學技術, 2010, 29(4): 374-379.
Gao Wei and Chen Chuan. Target motion parameters estimation based on radiated noise intensity and Doppler frequency shift of line spectrum[J].. 2010, 29(4): 374-379.
[4] 王志偉, 徐靈基, 楊益新, 等. 直線陣識別水下運動目標噪聲源方法研究[J]. 振動與沖擊, 2012, 31(19): 118-122.
Wang Zhi-wei, Xu Ling-ji, Yang Yi-xin,..Identification of noise sources of an underwater moving target based on a linear array[J]., 2012, 31(19): 118-122.
[5] 趙閃, 孫長瑜, 陳新華, 等. 一種改進的被動合成孔徑算法用于艦船輻射噪聲檢測[J]. 電子與信息學報, 2013, 35(2): 426-431.
Zhao Shan, Sun Chang-yu, Chen Xin-hua,.. An improved passive synthetic aperture sonar algorithm application for detecting of the ship radiated noise[J]., 2013, 35(2): 426-431.
[6] Xu Ling-ji, Yang Yi-xin, and Tian Feng. Doppler method for identification of noise sources on underwater moving target[C]. Asia Pacific Signal and Information Processing Association Annual Summit and Conference, Xi’an, 2011: 83-88.
[7] 田豐, 楊益新, 吳姚振, 等. 窄帶細化Wigner-Ville分布分析的快速實現方法[J]. 電子與信息學報, 2013, 35(7): 1713-1719.
Tian Feng, Yang Yi-xin, Xu Ling-ji,..Fast Realization of Zoom-spectrum Wigner-Ville Distribution Analysis in a Narrowband[J]., 2013, 35(7): 1713-1719.
[8] 吳國清, 馬力. 利用輻射噪聲多線譜的多普勒進行距離估計[J]. 聲學學報, 2006, 31(2): 140-145.
Wu Guo-qing and Ma Li. Range estimation by Doppler of multi-time in radiated noise spectrum[J]., 2006, 31(2): 140-145.
[9] Tam K C, Tang S K, and Lau S K. On the recovery of moving source characteristics using time--frequency approach[J]., 2012, 73(4): 305-314.
[10] Tian Feng, Yang Yi-xin, and Xu Ling-ji. Doppler parameters estimation by short time Chirp Fourier transform[C]. 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, 2011: 76-81.
[11] 徐靈基, 楊益新. 瞬時頻率估計的水下運動目標參數估計方法[J]. 哈爾濱工程大學學報, 2013, 34(9): 1089-1093.
Xu Ling-ji and Yang Yi-xin. Parameter estimation of underwater moving object based oninstantaneous frequency estimate[J].. 2013, 34(9): 1089-1093.
[12] Wang Yong. Time-frequency approach to underdetermined blind source separation[J]., 2012, 32(2): 306-316.
[13] Peng Zhi-ke, Meng Guang, Chu Fu-lei,.. Polynomial chirplet transform with application to instantaneous frequency estimation[J]., 2011, 60(9): 3222-3229.
[14] Yang Yang, Zhang Wen-ming, Peng Zhi-ke,.. Multicomponent signal analysis based on polynomial chirplet transform[J]., 2013, 60(9): 3948-3956.
[15] Yousef Zanjireh, Amir Hossein Rezaie, and Hamidreza Amindavar. Multi component signal decomposition based on chirplet pursuit and genetic algorithms[J]., 2013, 74(12): 1333-1342.
田 豐: 男,1983年生,博士生,研究方向為水下信息處理、噪聲源定位.
楊益新: 男,1975年生,教授,博士生導師,研究方向為陣列信號處理、水聲信號處理.
吳姚振: 男,1986年生,博士生,研究方向為水下信息處理.
Localization of Noise Sourceson Underwater Vehicle via Chirp-Fourier Processing
Tian Feng Yang Yi-xin Wu Yao-zhen Yang Long
(,,710072,)
The radiated noise sources of underwater vehicle can be localized by analysis of Doppler information. Then effective suppression of noise can be taken. However, traditional time-frequency methods can hardly distinguish the Doppler shift of noise sources with a single frequency. In this paper, a method of multi-Doppler signals analysis based on Chirp-Fourier transform is presented. The Doppler signal is decomposed into a sum of Linear Frequency Modulate (LFM) components, and transformed into two-dimensional frequency-modulate factor domain. Then the location of multiple noise sources can be estimated by the extracted Doppler information and the interference caused by single frequency sources can be suppressed. Computer simulation and experimental result at sea demonstrate the validity of the proposed method.
Underwater signal processing; Localization of noise sources; Underwater Doppler signal; Chirp-Fourier transform; Frequency-modulate factor domain
TB566
A
1009-5896(2014)12-2889-07
10.3724/SP.J.1146.2014.00106
楊益新 yxyang@nwpu.edu.cn
2014-01-15收到,2014-04-18改回
國家自然科學基金(11274253)資助課題
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
