減少無線自組網簇間通信沖突的MAC協議
2014-06-02 07:49:36雷洪利馬林華
計算機工程 2014年3期
雷洪利,田 雨,馬林華,茹 樂
?
減少無線自組網簇間通信沖突的MAC協議
雷洪利1,2,田 雨2,馬林華2,茹 樂2
(1. 西北工業大學航天學院,西安 710072;2. 空軍工程大學航空航天工程學院,西安 710038)
多個無人飛行器編隊在執行協同任務時,不但要保證編隊間指揮和協同數據的優先傳輸,還要保證編隊內的高速通信。為此,提出一種可減少無線自組網簇間通信沖突的MAC協議。該協議設計優先保證編隊間關鍵數據傳輸的混合接入機制,編隊間的通信均須經過簇首,簇首采用載波偵聽多路存取接入方式。編隊內可以直接通信,采用時分復用接入方式。對簇首節點分配 2個相鄰的子時隙,在簇間通信時發送相同的數據。雙時隙的使用可以保證當某個簇向其他簇發送數據時,其他簇首的內部通信數據只影響第1個時隙發送的數據,而載波偵聽則能使第2個時隙發送的數據不會與其他簇首產生內部通信沖突。仿真結果表明,該協議能有效減小簇內通信對簇間通信產生的干擾,提高通信成功率。
分簇;信道接入;時分復用;載波偵聽多路存取;沖突;丟包率
1 概述
無人飛行器已經廣泛地用于地理勘測、海洋監控等領域,但無人飛行器存在計算、通信和能量等諸多受限的問題。傳統MAC協議已經不能滿足多個無人飛行器編隊組網通信的需求。時分復用(Time Division Multiple Access, TDMA)將不同的節點分配到不同的時隙從而避免了信道沖突。ALOHA[1]和載波偵聽多路存取(Carrier Sense Multiple Access, CSMA)[2]采用競爭接入的方式利用相同的信道資源。典型的基于分簇的數據收集協議有LEACH[3]、HEED[4]等,這些協議需要使用頻分多址(Frequence Division Multiple Access, FDMA)或碼分多址(Code Division Multiple Access,CDMA)的方式通信[5],文獻[6-7]采用簇間FDMA、簇內TDMA/CSMA的混合接入方式。上述協議由于采用了FDMA或CDMA,增加了硬件的復雜度。文獻[8]根據流量大小在TDMA和CSMA協議之間進行切換。Z-MAC協議[9]結合了CSMA和TDMA,減弱了2種協議的缺點。文獻[10-12]采用了簇間CSMA,簇內TDMA的接入方式,但是不能保證優先傳輸簇間的指揮、協同等關鍵數據。本文提出一種基于分簇網絡結構的MAC接入協議DSHP,該協議在簇首之間采用CSMA競爭接入方式,在簇內采用TDMA接入方式,通過避免簇內通信對簇間通信產生干擾,提高簇間通信的成功率。
2 協議應用場景
假設每個無人飛行器編隊的半徑為10 km,任意2個編隊所在球域球心間的距離大于40 km。在這種特殊拓撲結構下,可以通過電磁波衰減的特性,設計出編隊內部無隱藏終端,各個編隊內部可以同時通信,編隊間通信優先實現的MAC協議。可以將多個無人飛行器編隊組成的網絡視為分簇網絡,每個編隊都是網絡中的一個簇。
在計算電磁波的傳輸距離時,本文結合了電磁波自由空間損耗、工程實踐經驗、大氣衰減和通信裕量。考慮天線后端的低噪放=2.0 dB,接收信噪比門限=12.0 dB (保證誤碼率<10–6),中頻處理損耗=2.0 dB,編碼增益G=5.0 dB,大氣衰減每公里的影響=0.05 dB,發射機天線增益和接收機天線增益=0 dB;由于飛行器的姿態變化等考慮通信裕量10 dB。由靈敏度及衰減的計算公式,可得:



如果發射機功率為(W)、頻帶寬度為(MHz) 、最大通信距離為(km),只有當式(3)成立時才能滿足系統要求。根據式(1)~式(3)可以得到如表1所示的統計結果。
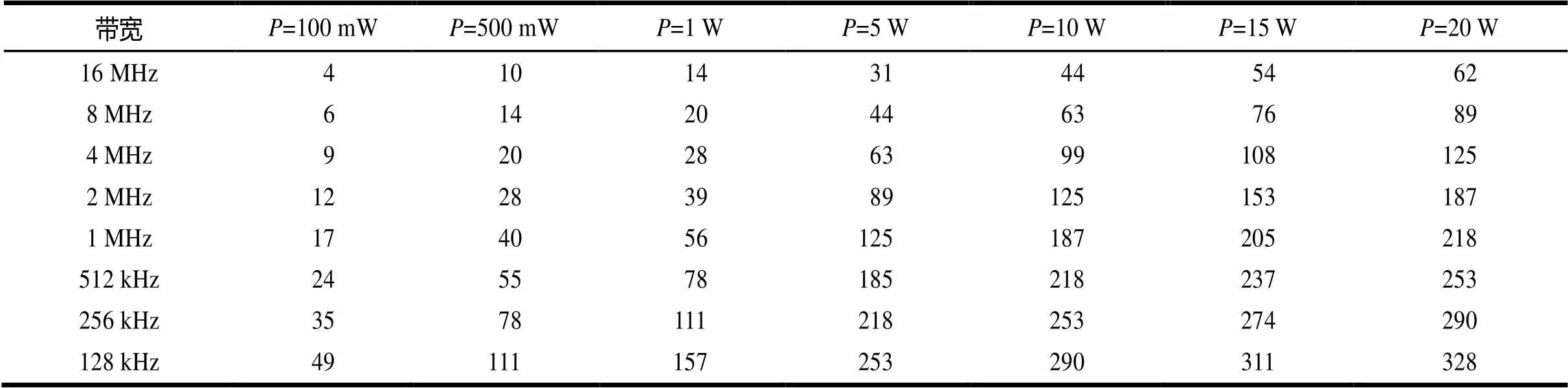
表1 考慮大氣衰減時的通信距離 km
由表1可知,當發射功率為1 W、帶寬為8 MHz時最大通信距離為20 km;發射功率為1 W、帶寬為256 kHz時最大通信距離為111 km。因此,簇內部通信采用8 MHz數據帶寬,而簇間的通信采用256 kHz數據帶寬,并將其擴頻至8 MHz帶寬。這樣的優點是:
(1)網絡中的各個節點不必同時配備8 MHz帶寬和 256 kHz帶寬的射頻模塊,只使用8 MHz帶寬的射頻模塊就可以實現簇間的通信,降低了成本。
(2)簇首之間的通信可以通過降低簇首之間的數據通信帶寬提高其通信距離;而簇內通信不會影響到其他簇內的通信。
(3)簇內通信速度高達4 Mb/s,如果不分簇則所有節點的數據速率都要降至128 Kb/s才能滿足通信距離的要求。
(4)通知在該場景下,網絡由距離較遠的多個簇組成,而簇內的各個節點距離較近,不存在隱藏節點。不同簇之間的數據只能通過簇首傳輸,簇首之間采用CSMA的競爭接入方式,簇內采用TDMA的接入方式。
3 簇內通信與簇間通信的沖突問題
簇內TDMA及簇間CSMA相互獨立的實現方式,在接收端存在沖突,結合圖1及圖2進行分析。圖2給出了簇、簇及簇中TDMA的時隙劃分情況,簇內節點對應時隙。簇內的時隙6、簇內的時隙1、簇內的時隙均為簇首節點對應的時隙。結合圖1進行分析,假定當前時刻為,簇內的簇首節點1已經建立了與簇內簇首節點6的通信。簇的簇首節點對應的時隙在時刻到來,該簇首節點在發送控制分組之前首先對信道進行偵聽,發現信道忙被占用,則先不發送數據分組,隨機地等待一段時間之后再重新檢測信道。在時隙結束前,直到檢測到時隙空閑才進行簇間數據分組的發送,避免了信道接入的沖突。但當1時刻,簇內節點4的時隙到來時,節點4有數據分組需要進行簇內的信息傳輸,節點4為非簇首節點,在自己的時隙直接進行數據分組的發送,于是對簇的簇首節點1與簇內簇首節點6已經建立的通信造成了干擾,導致分組丟失,通信建立失敗。

圖1 簇內及簇間信道接入方式
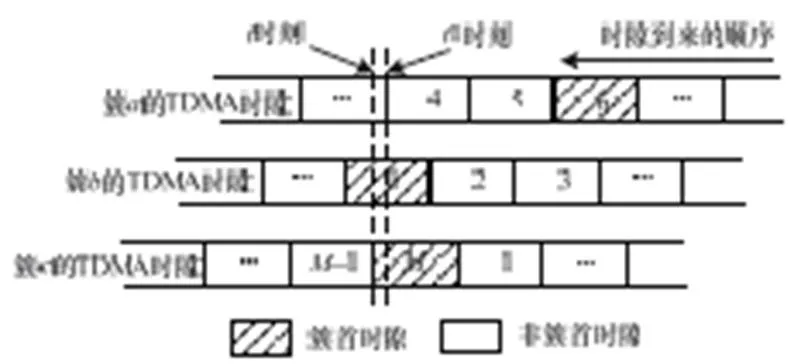
圖2 簇內及簇間的通信沖突
為解決該問題,通常的做法是在TDMA時隙開始階段設置偵聽部分,如圖3所示。當簇內節點對應的發送時隙到達時,節點先對信道進行載波偵聽,若發現簇內信道未被占用,則進行數據分組的發送,若信道被占用,則節點不發送數據,等待下一幀中對應時隙的到來,優先保證簇與簇之間通信的建立。

圖3 TDMA偵聽時隙示意圖
當1時刻,簇內節點4的時隙到來時,節點4先對信道進行載波偵聽,發現信道被進行簇間通信的簇首節點以CSMA信道接入方式占用,則節點4不發送數據,優先保證了簇的簇首1與簇的簇首6之間的通信。但通過更進一步的分析發現,這種為TDMA時隙增加偵聽階段的方法,也無法保證簇與簇之間的通信一定能夠建立。例如在簇內存在簇的簇首1無法建立通信的節點3時,節點3恰好在對應的時隙進行簇內數據分組的傳輸。當節點1的時隙到來,若無其他簇的簇首正在進行簇間通信,節點3偵聽信道狀況為空閑,于是發送數據分組。則該數據分組仍然會在接收端發生沖突,致使分組發送失敗,簇之間的通信沒有建立。
4 簇內TDMA和簇間CSMA的實現
針對上節的分析,只要有無法載波偵聽到的節點存在,則沖突就無法避免。但這種在可通信范圍內卻無法偵聽到的節點總是極少數的“特殊情況”。解決方案為:在TDMA的同一幀中為每個非簇首節點分配一個時隙,每個時隙的開始設定為載波偵聽部分,目的是偵聽是否有其他簇的簇首節點發送信號,若偵聽到有其他簇的簇首節點發送信號,則該節點在自己的時隙中不發送信號。而為每個簇首節點分配2個連續的時隙,在第1個時隙的開始仍然設定為載波偵聽部分,而在其連續的第2個時隙的開始階段沒有設置載波偵聽部分。設簇內的節點總數為,改進后的TDMA協議的幀結構如圖4所示。
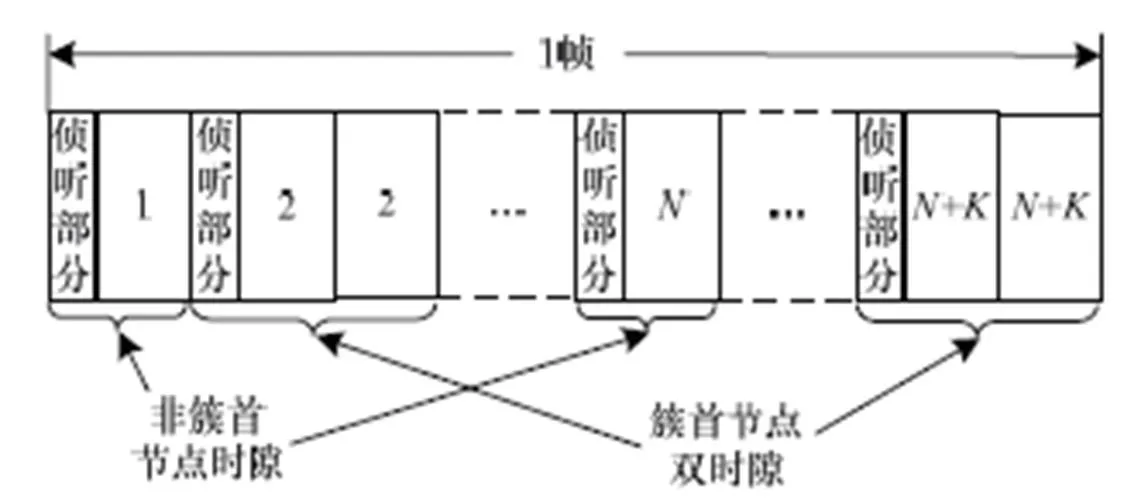
圖4 改進后TDMA的幀結構
在圖4中,簇的簇首0節點以CSMA的方式進行信道的載波偵聽,若偵聽到信道空閑,即沒有其他簇的簇首節點接入信道,則節點0在01時隙和02時隙發送相同的數據。具體分為以下2種情況進行分析,如圖5所示,其中,1節點為0節點無法偵聽到的節點。
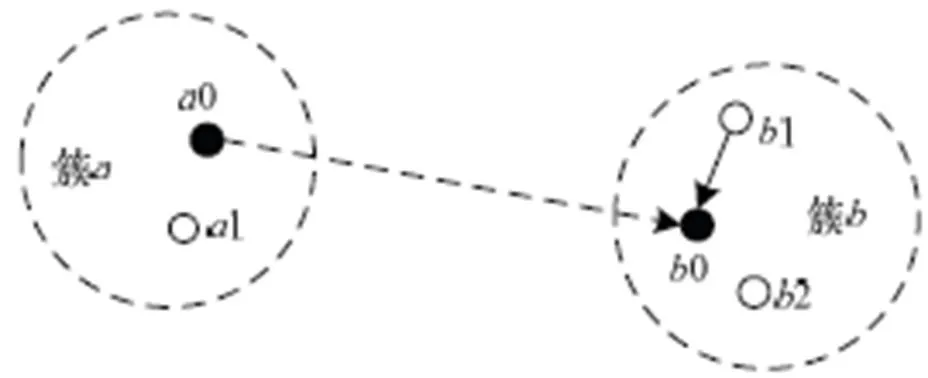
圖5 簇間通信示意圖
(1)當不存在節點1的發送干擾時,是單純的簇間競爭的CSMA機制。完成一次簇間的通信,其實現過程的時間域示意圖,如圖6所示,圖中標注的01為節點0的第1個時隙,02為節點0的第2個時隙。1、2分別為節點1、2對應的時隙。接收節點0簇內對應發送時隙的非簇首節點1和2偵聽到有簇首節點正在發送數據時,則不再進行分組的發送,等待下一幀中對應時隙的到來。此過程中其他簇首以CSMA機制偵聽信道。
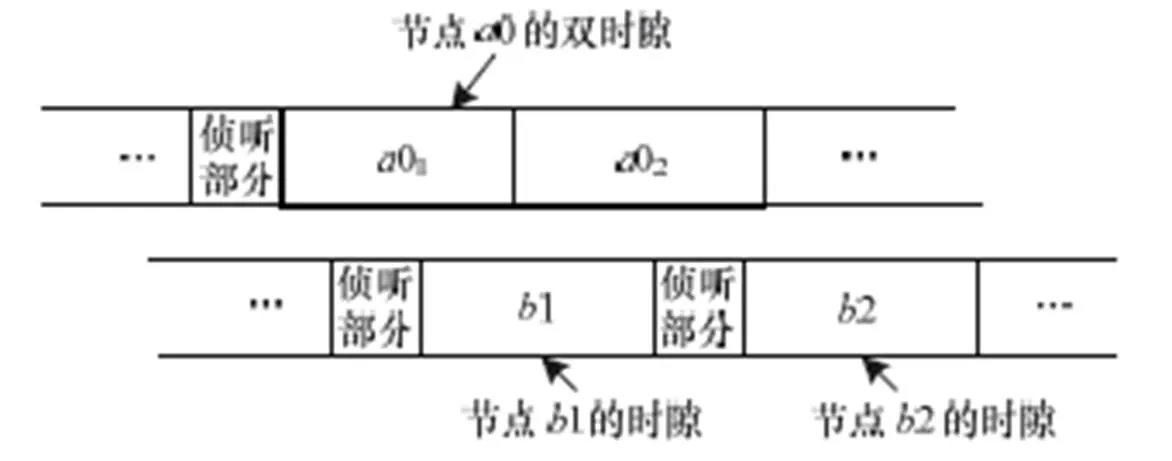
圖6 無隱藏終端干擾時信道接入的時隙示意圖
(2)當存在節點1的發送干擾時。簇中有數據發送的簇首0在第1個時隙開始時偵聽信道,由于偵聽不到節點1正在發送數據分組。0則認為信道處于空閑狀態,直接進行數據分組的發送,使得在接收端1處發生了沖突,造成分組的丟失,如圖7所示。
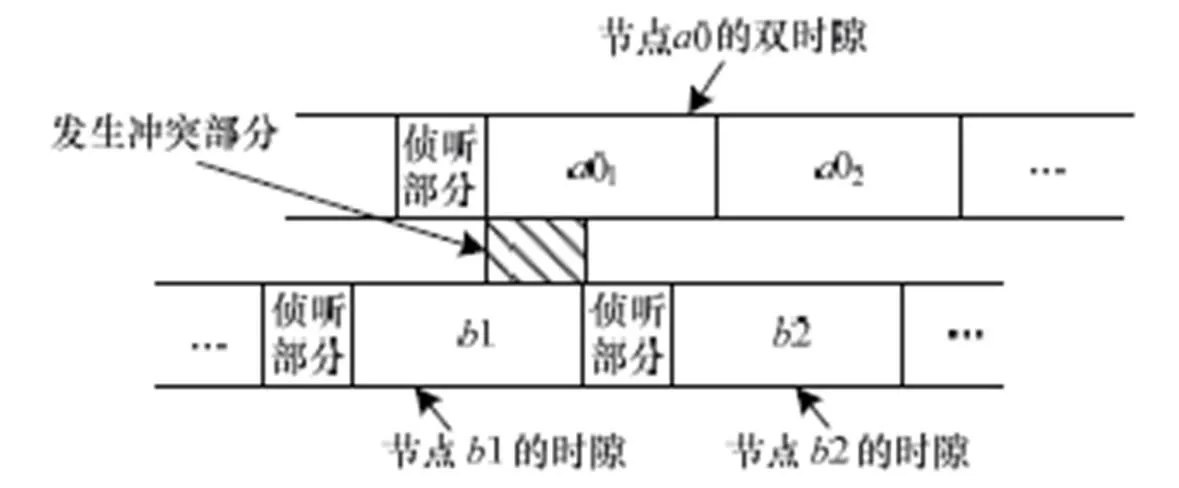
圖7 存在隱藏終端干擾時信道接入的時隙示意圖
此時節點0在01時隙發送的數據和1節點發送的數據碰撞,簇內的其他節點此時偵聽到了沖突,在之后2節點的時隙不發送數據分組,隨后的節點在接入信道前都會進行載波偵聽,當偵聽到信道空閑時才進行分組地發送,保證了簇與簇之間通信的順利進行。此過程中其他簇的簇首節點以CSMA機制偵聽到信道。當節點偵聽到信道忙時,說明簇間有其他的簇首節點正在占用信道,則隨機的等待一段時間后再重新檢測信道。
分析以上實現過程可以看出,改進TDMA協議為簇首節點分配雙時隙的優勢在于:簇首節點雙時隙的使用,有效地保證了簇間通信的成功率。即使存在簇內節點的發送干擾時,也能保證簇首節點使用第2個時隙直接進行分組的發送,保證信道接入的成功,實現簇與簇之間的通信。
5 仿真實驗
在200 km×200 km區域中分別放置=5和=10個簇,各簇的范圍為半徑10 km的圓域,每個簇內有8個節點。簇內TDMA劃分為9個不同的時隙,簇首節點占用2個時隙。設定任意2個簇所在圓的圓心之間的距離大于40 km。各個簇首在編寫的Mobility Configure模塊控制下移動,而單個無人機節點在其所在簇的球形區域(以簇首為圓心,半徑為10 km)內隨機移動。簇與簇之間的通信只通過簇首節點進行,簇首節點可以給簇內一跳鄰居節點、其他簇的簇首節點及簇間的非簇首一跳鄰居節點發送數據包,而非簇首節點只在本簇內進行數據包的發送,不與簇外節點發送數據包。節點的移動速度設定為40 m/s。數據包的大小為2 Kb。非簇首節點只進行簇內數據包的發送,設定其數據分組的產生間隔服從均值為0.002 2 s的泊松分布。簇首節點既要進行簇內數據包的發送,還要進行簇間數據的發送,設定簇首節點給本簇節點發送的數據分組的產生間隔服從均值為0.002 5 s和1 s的泊松分布。設定簇首節點進行簇間通信的數據分組的產生間隔服從均值為10 s的泊松分布,數據分組的大小為400 Kb~900 Kb。仿真時間=300 s,每種場景運行50次,對仿真結果取平均值。在圖8、圖9中,without DSHP為采用本文圖3所示的接入方式。
圖8分析了簇內及簇間通信同時存在時,丟包率與簇間產生的數據量之間的關系。仿真結果表明DSHP有效的降低了簇間通信丟包率,原因是DSHP避免了簇間的數據受到簇內通信干擾而產生丟包。由圖8可以看出,簇內數據包的丟失率隨簇間通信業務量的增大而有所增加,呈一定的正比關系。當簇首節點進行簇間的通信時,會對其他簇的非簇首節點的通信造成干擾,引起數據包的丟失。當簇間通信的數據分組產生量不斷增加或簇數量增加時,簇間需要傳輸的數據量增大,所需要占用的時隙越多,對簇內數據傳輸造成的影響也越大,從而導致簇內丟包率的增加。當簇的數量5增加到10時,DSHP算法簇間的丟包率基本保持不變,但簇內通信的丟包率增加了約1倍。DSHP在進行簇內及簇間通信時,優先保證了簇間通信的建立。
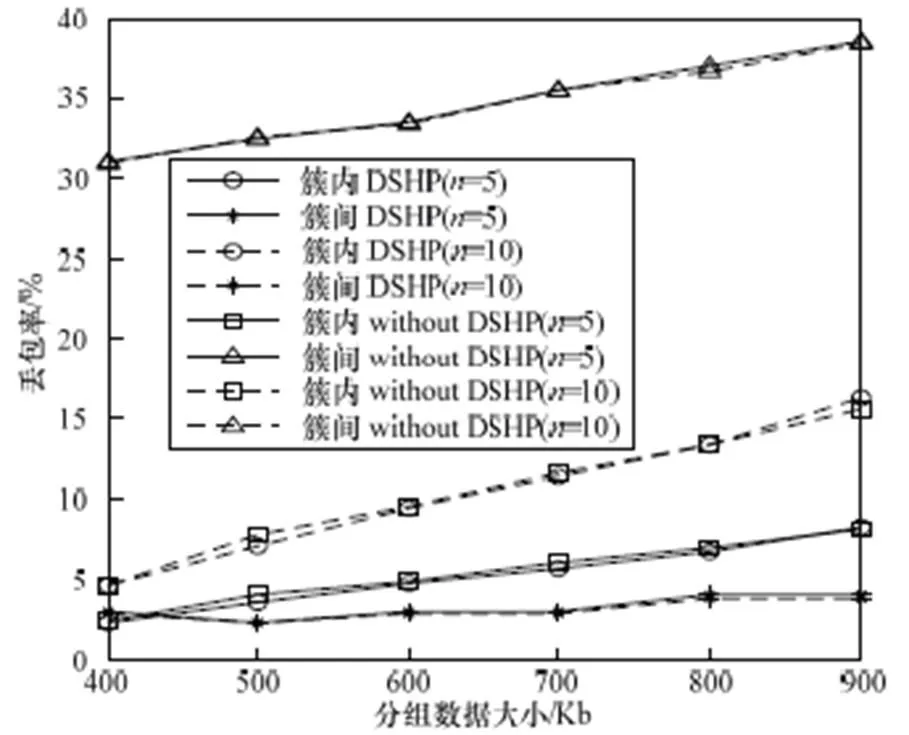
圖8 簇間產生的數據分組與丟包率的關系(產生間隔均值為10 s)
圖9描述的是簇間存在大量數據需要傳輸,即簇間產生數據分組的平均間隔時間減少到1 s時,簇內簇間通信的丟包率。DSHP的簇間通信丟包率依然保持較低的水平,這是因為DSHP為簇首分配了雙時隙,當第1個時隙的數據因為接入碰撞而丟包時,數據依然可以通過第2個時隙完整地傳輸。當簇的數量5增加到10時,DSHP算法簇間的丟包率基本保持不變,但是簇內通信的丟包率增加了將近1倍。
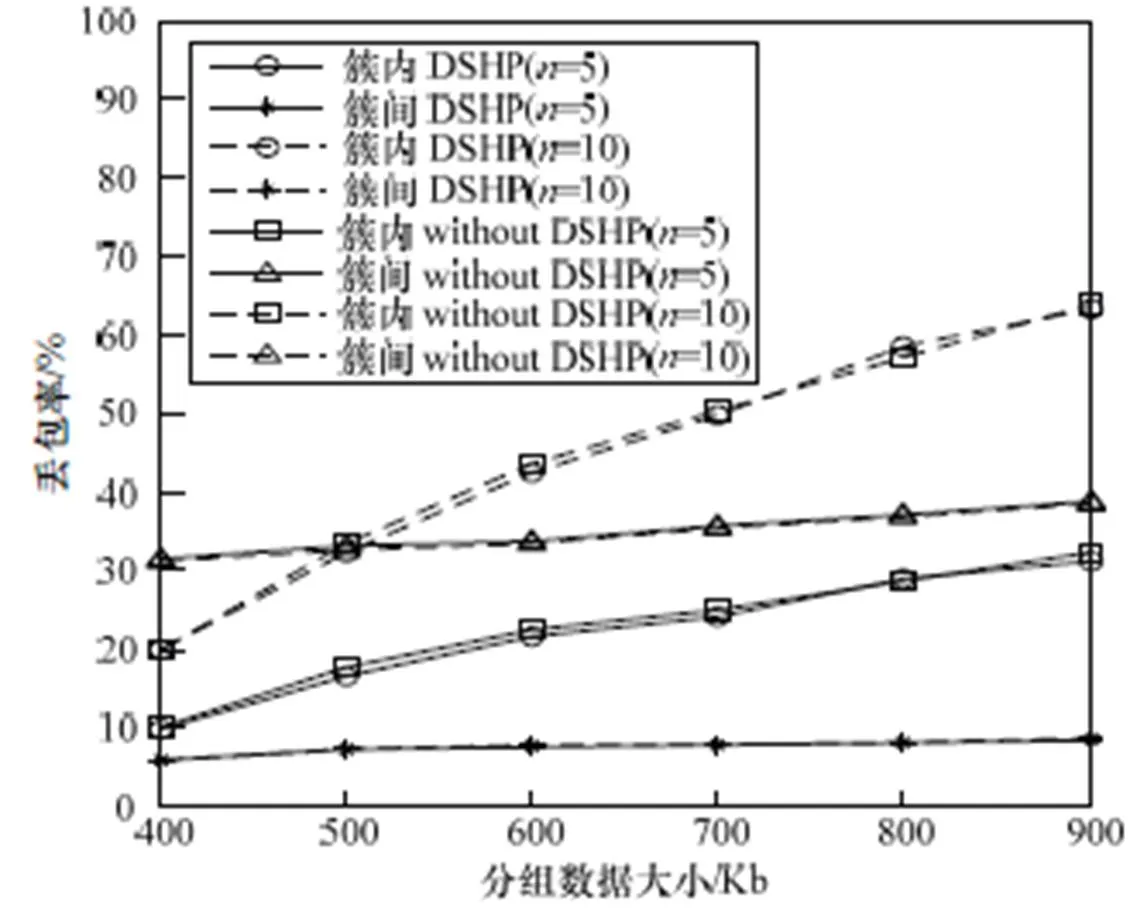
圖9 簇間產生的數據分組與丟包率的關系(產生間隔均值為1 s)
比較圖8和圖9可以看出,采用DSHP后,簇內通信的丟包率隨著平均時間間隔的減少而增加,而簇間通信的丟包率幾乎保持不變,即使簇數量變化時DSHP算法的簇間通信丟包率也基本保持不變。因此,DSHP可以有效地保證無人機編隊間指揮、控制、協同等關鍵數據的傳輸。由于飛行器編隊間主要傳輸的是控制、指揮、協作等數據,此類數據的數據量較少,因此簇間通信不會出現如圖9所示的大量通信。雖然簇內通信的丟包率很大,但圖9僅是證明即使簇間通信量很大,DSHP依然可以保證簇間通信的優先實現,這種簇間的大量通信在實際應用中是不會出現的。
6 結束語
本文針對分簇網絡設計了一種采用TDMA和CSMA的MAC協議,在使用少量握手協議的前提下優先保證簇間的通信,有效解決了簇內與簇間通信時存在的沖突問題。仿真結果表明,DSHP算法可以在保持簇間通信的同時,降低簇間通信的丟包率。下一步工作將研究在保證簇間通信優先的前提下,如何降低簇內通信的丟包率。
[1] Abramson N. Development of the ALOHANET[J]. IEEE Transactions on Information Theory, 1985, 31(2): 119-123.
[2] Kleinrock L, Tobagi F. Packet Switching in Radio Channels: Part I——Carrier Sense Multiple Access Modes and Their Throughput Delay Characteristics[J]. IEEE Transactions on Communications, 1975, 23(12): 1400-1416.
[3] Heinzelman W B, Chandrakasan A P, Balakrishnan H. An Application-specific Protocol Architecture for Wireless Microsensor Networks[J]. IEEE Transactions on Wireless Communications, 2002, 1(4): 660-670.
[4] Younis O, Fahmy S. HEED: A Hybrid, Energy-Efficient, Distributed Clustering Approach for Ad Hoc Sensor Networks[J]. IEEE Transactions on Mobile Computing, 2004, 3(4): 366-379.
[5] 龔海剛, 劉 明, 王曉敏. TLTS: 大規模無線傳感器網絡下基于簇的兩級TDMA調度協議[J]. 計算機研究與發展, 2007, 44(1): 71-77.
[6] 劉蘭軍, 張曉彤, 王 沁, 等. 一種基于分簇結構的無線傳感器網絡混合調度MAC協議[J]. 計算機科學, 2008, 35(9): 67-70.
[7] 鐘揚坤, 向 新, 劉在勇, 等. 混合多址接入的無線傳感器網絡設計及實現[J]. 電視技術, 2012, 36(19): 131-135.
[8] Min Zhang, Babaei A, Agrawal P. A Cluster-based Hybrid Access Protocol for Wireless Sensor Networks[C]//Proc. of IEEE Sarnoff 2012. Newark, USA: IEEE Computer Society, 2012: 1-5.
[9] Rhee I, Warrier A, Aia M, et al. Z-MAC: A Hybrid MAC for Wireless Sensor Networks[J]. IEEE Transactions on Net- working, 2008, 16(3): 511-524.
[10] Shakir M, Ahmed I, Peng M, et al. Cluster Organization Based Design of Hybrid MAC Protocol in Wireless Sensor Networks[C]//Proc. of the 3rd International Conference on Networking and Services. Athens, Greece: IEEE Computer Society, 2007: 78.
[11] 方維維, 錢德沛, 褚天舒, 等. 分簇無線傳感器網絡可靠高效的數據傳輸方案[J].西安交通大學學報,2009, 43(8): 28- 32.
[12] 柳衛平, 王培康. 一種基于分簇的無線傳感器網絡MAC協議[J]. 無線通信技術, 2009, 18(2): 53-56.
編輯 金胡考
MAC Protocol for Reducing Inter-cluster Communication Conflict in Wireless Ad Hoc Network
LEI Hong-li1,2, TIAN Yu2, MA Lin-hua2, RU Le2
(1. College of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China; 2. School of Aeronautics and Astronautics Engineering, Air Force Engineering University, Xi’an 710038, China)
There are two issues should be satisfied when multiple unmanned aircraft groups implementing cooperative task. First, the command and cooperation data should be transmitted preferentially among the groups. Second, the inner group transmission rate should be fast. To solve these problems, a cluster-based MAC protocol Double Slots Hybrid Protocol(DSHP) is presented. The hybrid access protocol DSHP sets the key data transmission among groups as top target. The inter-group communication is processed through cluster head with Carrier Sense Multiple Access(CSMA) access protocol. The nodes in the same group can communicate directly with each other with Time Division Multiple Access(TDMA) access protocol. The cluster head is assigned two successive time slots. The two time slots send the same data during inter-cluster communication. The double slots can make sure that the inner-group data of other cluster heads only collide with the inter-group data in the first time slot, and the carrier sensing can make sure that the transmitted data in the second time slot won’t ruined by any inner-group data. Simulation results show that this protocol can prevent the inter-group communication from the interference of inner-group communication and improve the successrate of communication.
clustering; channel access; Time Division Multiple Access(TDMA); Carrier Sense Multiple Access(CSMA); conflict; packet loss rate
1000-3428(2014)03-0158-05
A
TP393
陜西省電子信息系統綜合集成重點實驗室基金資助重點項目(2011.ZD01, 2011.02Y02);國家部委基金資助項目。
雷洪利(1970-),男,教授,主研方向:通信與信息系統,導航制導與控制;田 雨,博士研究生;馬林華,教授、博士;茹 樂,副教授、博士。
2013-10-30
2013-12-27 E-mail:labyahoo@126.com
10.3969/j.issn.1000-3428.2014.03.032
