Geo-Pilot旋轉導向系統發展與應用研究
2014-06-05 15:28:52付天明
石油礦場機械 2014年5期
關鍵詞:系統
付天明
(中石化中原石油工程有限公司西南鉆井分公司,成都 610021)①
Geo-Pilot旋轉導向系統發展與應用研究
付天明
(中石化中原石油工程有限公司西南鉆井分公司,成都 610021)①
旋轉自動導向系統是旋轉導向鉆井技術的核心,是目前世界上具代表性和先進性的鉆井技術。概述了Geo-Pilot旋轉導向鉆井系統的發展概況,分析其系統構成和導向機構工作原理,總結了該系統的特點和優勢,為現場應用提供參考。
旋轉導向鉆井系統;導向原理;系統結構;偏心裝置
早期的第1代旋轉導向工具采用“側推鉆頭”的方式,利用工具外部的零部件側推鉆頭,給鉆頭施加一個強大的外力,迫使鉆頭偏離鉆具軸心運動而切入地層,從而達到定向鉆井的效果。這種工作方式由于鉆頭是在強大外力的作用下工作的,鉆頭受力不均勻,井眼有擴大的趨勢,容易造成井眼螺旋。同時,還會導致很多問題發生,最主要的一點就是推動鉆頭側向運動的零部件往往容易損壞,導致鉆頭螺旋、渦動、高振動,以及MWD/LWD的非正常損壞。其后果是井眼質量受到限制,清潔井眼、反劃眼都要浪費大量的時間,測井、下套管、完井作業困難,難以體現施工效益[1-3]。
鉆頭定位旋轉導向鉆井系統Geo-Pilot是美國斯派里森公司(現為美國Halliburton一分公司)和日本國家石油有限公司JNOC聯合開發的產品。相對于第1代“側推鉆頭”旋轉導向工具而言,該工具是第1代“鉆頭導向”旋轉導向工具。該系統并不是利用系統外部的零部件推動鉆頭來達到定向效果,取而代之的是1套偏心裝置,該偏心裝置使鉆頭驅動軸彎曲,驅動軸彎曲就會使使鉆頭軸心偏離鉆具軸心,從而達到定向鉆進的效果。該系統的斜向驅動軸部分由JNOC設計,斜向軸外部的旋轉導向部分由斯派里森公司設計。在獲得JNOC專利授權的情況下,該系統由美國斯派里森公司加工制造并投入商業化運營[4-10]。
1 技術分析
1.1 系統結構
該系統主要由驅動軸、外殼、驅動軸密封裝置、非旋轉設備、上下軸承、偏心裝置、近鉆頭井斜傳感器、近鉆頭穩定器、控制電路和傳感器等部件構成,如圖1所示。
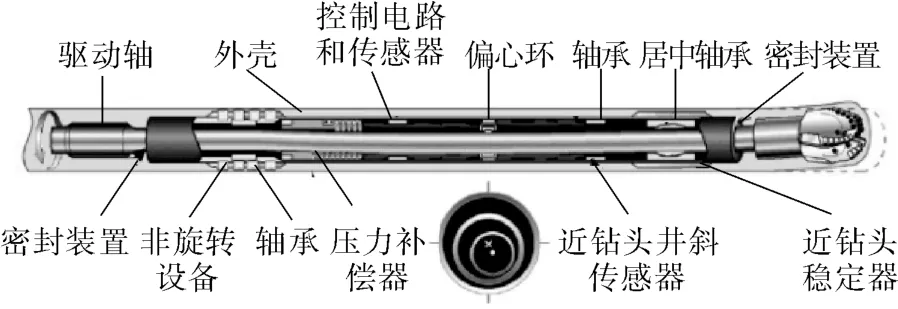
圖1 Geo-Pilot旋轉導向系統結構
1) 驅動軸貫穿整個系統,其兩端安裝在軸承上,上部和鉆具連接,下部和鉆頭連接,是整個系統的動力傳輸部分。
2) 外殼是系統的外尾部結構,相對于地層不轉動。其上端和系統的非旋轉設備連接,下端裝有1個近鉆頭穩定器。
3) 非旋轉設備中的彈簧滾柱確保扶正器處于滿眼狀態,并保持和井壁接觸,從而使系統的外殼在轉動軸轉動的情況下不旋轉。
4) 軸承分上下2部分,除常規的減阻作用外,上面的軸承可以防止上部扶正器上面的鉆具彎曲,下面的滾珠主要是使Geo-Pilot軸心居中,同時還起到一個支點的作用,以使鉆頭在傳動軸稍微彎曲的情況下,能產生較大的偏斜效果。
5) 偏心裝置是整個系統導向功能的核心(如圖2),由2個偏心環組成。控制2個偏心環運動的機械裝置是相互獨立的,其轉動方向和轉動的位置由控制電路控制。
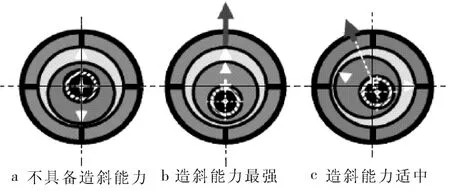
圖2 2個偏心環相對位置關系和造斜能力示意
6) 控制電路和傳感器部分是檢測和控制導向工具狀態的核心。一方面傳感器不斷檢測系統的工具面位置(導向系統的工具面方向);另一方面,該部分還根據設計的工具面數據,控制導向系統在鉆進過程中對系統產生的工具面偏移進行校正,使系統始終處于穩定的工具面位置施工。
7) 近鉆頭穩定器主要是起支撐的作用,以確保鉆頭在驅動軸發生彎曲的情況下,強迫鉆頭改變軸心方向,達到鉆頭定向的效果。
8) 近鉆頭井斜傳感器用來量近鉆頭井斜和系統的工具面方向。壓力補償器使系統旋轉密封部位內的壓力稍微高于環空壓力。
1.2 工作原理
Geo-Pilot旋轉導向系統工作原理如圖3。驅動軸貫穿整個系統,是驅動鉆頭轉動的動力傳輸裝置。系統外殼安裝在軸承的外圍,相對地層不旋轉,以此提供一個相對穩定的工具面。外殼兩端的旋轉密封裝置使驅動軸在旋轉的同時,所有運動的零部件都浸泡在外殼內的潤滑油中,以降低運動摩阻并保護這些零部件。外殼內部有一個傳感器組,用以測量近鉆頭井斜和系統的工具面方向。外殼的中間就是系統的核心部件——偏心裝置,當2個偏心環的偏心位置正好相反時,此時驅動軸不彎曲;當2個偏心環的偏心方向一致時,此時驅動軸彎曲幅度最大(其導向能力達到最強);2個偏心環的偏心位置不在同一直線時,驅動軸的彎曲度介于彎曲幅度最大和不彎曲之間,由此控制系統不同的造斜能力。偏心環的偏心方向可以通過控制偏心環凸輪的轉動來實現,2個偏心環的偏心方向矢量和可以指向360°范圍內的任意方向,其矢量和的大小也可在最大和最小之間調節,由此形成了系統在不同的方向進行導向,且造斜能力可以在最大和最小之間進行控制的特性。
2個偏心環的偏心位置不同時,就會產生轉動軸偏斜的效果,偏斜程度和偏斜方向可以根據施工的需要進行調整和控制。系統的偏心裝置和井下控制軟件一起工作,自動防止系統在設計工具面誤差范圍外的狀態下工作。
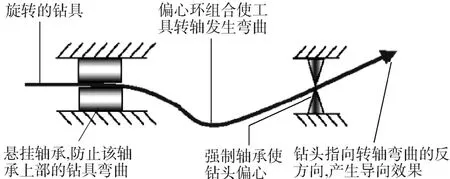
圖3 Geo-Pilot旋轉導向系統工作原理
系統的下部軸承距系統下端部0.61 m,這種結構可以使驅動軸在發生輕微彎曲的情況下,鉆頭能有較大的偏斜幅度。Geo-Pilot旋轉導向系統工作原理模擬如圖4所示。
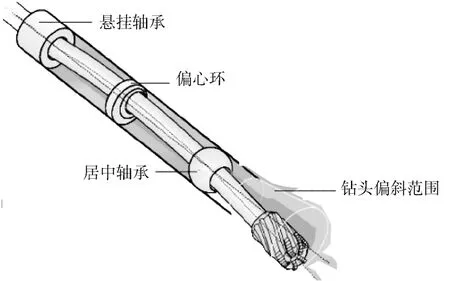
圖4 Geo-Pilot旋轉導向系統工作原理模擬
1.3 閉環控制
在最初的試驗階段,系統不具備受地面指令控制的功能,系統的偏斜是固定不變的。這種原始的旋轉導向工具只能通過人工方式來控制其工作,隨后才研發出閉環控制功能。
首先,設計的工具面通過旋轉鉆具下達到井下MWD,然后將另一個指令從地面下達到井下工具,要求它轉換該工具面。當從地面下達第2個指令要求開始鉆進時,Geo-Pilot自動調整偏心裝置里2個偏心環的偏心位置,使轉動軸的偏斜方向達到設計要求。然后通過不斷地監測外殼的旋轉、調整偏心裝置的偏心位置來保持工具以要求的方向鉆進。
工具面校正的速度很快,目前限制工具面的誤差為7°。當轉動軸工作的工具面值超出設計的誤差范圍時,偏心裝置能在5 s內將其校正到符合要求的工具面范圍內。如果按該工具面鉆進,軌跡的方向控制不能滿足設計要求,可以再從地面向井下工具發送新的指令,新的指令被井下工具接受后,井下工具就按該工具面施工。這種工作模式就是閉環系統。
Geo-Pilot還可以實現向井下工具傳送設計的工具面數據、方位/井斜、靶點坐標等多項功能。所有這些功能只需要在地面輕輕敲擊鍵盤就可以實現。
Geo-Pilot與斯派里森公司的MWD/LWD組合施工可實現數據的雙向通訊,同時和INSITE(The Integrated System for Information Technology and Engineering)系統兼容,利用該系統在地面除實時顯示有關地質參數信息外,還實時顯示工具的工作參數和工作狀態,實現實時幾何導向和地質導向。Geo-Pilot井下組合如圖5所示。
Geo-Pilot旋轉導向系統地面與井下工具間的通訊是通過改變泥漿的排量來實現的。由于改變泥漿的排量不需要停止鉆具,因而可以在不影響鉆井的條件下實現工具位置的改變,實現快速鉆進。
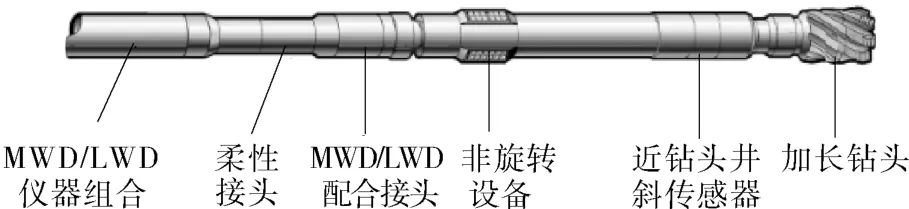
圖5 Geo-Pilot井下組合示意
Geo-Pilot采用自動控制和人工控制2種方式進行旋轉導向。采用自動控制方式,系統按預先設置的軌跡參數自行控制實鉆軌跡;采用人工控制方式,系統的導向方向和軌跡的控制由定向工程師負責完成。
目前,Geo-Pilot有2種系列產品:?7600系列(?172 mm)用于?212.70~?269.88 mm井眼施工;?9 600系列(?244.5 mm)用于?311.1~?444.5 mm井眼施工。
1.4 技術規范(如表1)
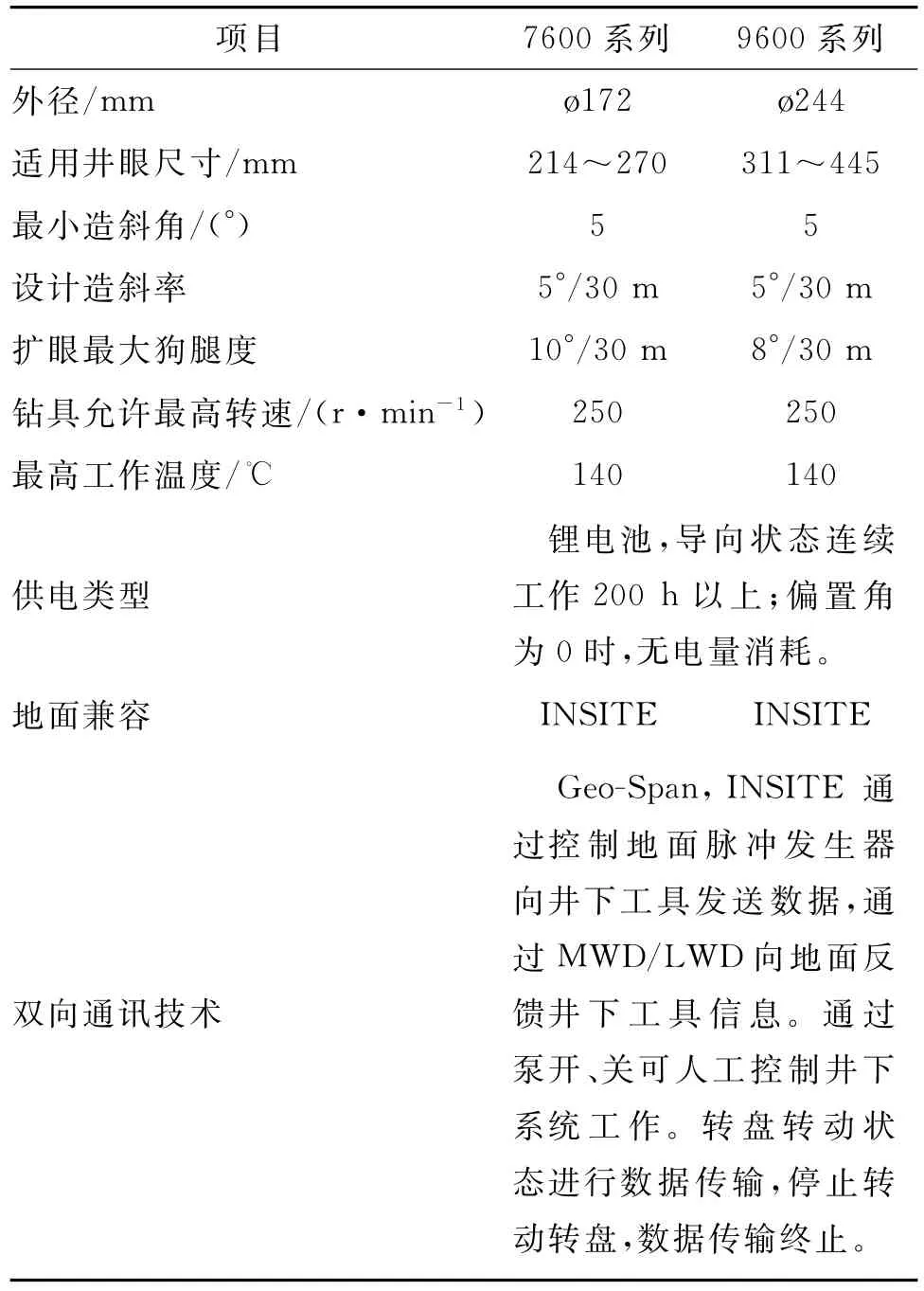
表1 Geo-Pilot旋轉導向系統技術規范
2 系統特點
1) 系統的工作電源由1個整裝的長壽命鋰電池提供,用以監測鉆頭指向、鉆具轉動速度、自身參數等。
2) 偏心裝置簡單,采用2個偏心環,一個套在另一個里面,使裝在2個軸承之間的轉軸彎曲,產生鉆頭的偏心效果。
3) 自動化修正系統使用近鉆頭井斜傳感器,自動修正偏心環位置,自動調整定向工具面和井斜。
4) 井下系統和地面之間的遙控雙向通訊,在不占用任何鉆機作業時間的情況下,軌跡可以得到精確控制。雙向通訊是通過Geo-Span下行命令傳輸系統和MWD/LWD來實現的,通過Geo-Span向井下旋轉導向系統下達指令和工作數據,井下旋轉導向工具接收指令并通過MWD/LWD系統向地面反饋工作數據和工作狀態。采用這種技術,下達的指令從下達開始到井下返回信息,總時間不超過90 s。由于該系統在地面不會發生故障,因此始終能夠對井下工具進行控制。控制方法為:開泵,在地面轉動一個事先規定的井下工具能識別的指令盤,地面指令就可立即傳輸到井下儀器里面。
5) 為了提高Geo-Pilot系統的可靠性和工作壽命,系統內部的軸承、密封件以及其他運動元件全部浸泡在潤滑油中。同時由于系統與泥漿隔離工作,從而避免了與泥漿之間的兼容性問題的發生。
6) Geo-Pilot能夠鉆多目標井,可大幅度提高單井產量。利用該系統鉆側鉆井,在北海的2個主井眼鉆了6個分支井,其中第四裸眼側鉆分枝井垂深一直控制在設計軌跡±0.3 m范圍內。
3 系統優勢
1) 摩阻低,因而可有效地保證軌跡向前延伸,用于完鉆后的下套管和測井作業都很順利。Geo-Pilot由于避免了鉆頭側削(底層)的現象,鉆具的振動有效降低,該工具特別適用于大摩阻、大轉矩的大位移井和復雜程度很高的三維定向/水平井的施工。
2) 利用該系統施工有利于消除井眼螺旋、減少井眼的彎轉次數、提高軌跡的定向控制效果和鉆井效率、縮短鉆井周期,便于下套管和測井作業。
3) 井眼清潔效果好,減少了短起鉆次數,提高了鉆機的有效工作時間,對大角度井眼效果更佳。
4) 加長鉆頭的加長部分相當于扶正器的效果,使鉆頭的使用壽命延長,起下鉆次數減少,用于鉆進的時間增加,提高了單井鉆進速度。
5) 使用加長保徑鉆頭,井下鉆具的振動降低,MWD/LWD出現故障的幾率降低。
6) 使用鋰電池供電,取消了渦輪發電機,增加了系統工作的可靠性,延長了系統的有效工作時間。
7) 該系統和泥漿隔離工作,消除了系統的軸承、密封件以及其他機械零部件和泥漿的不兼容問題。
8) 該系統具備自身診斷功能,向地面實時傳輸系統的工作數據及工作狀態,可確保系統正常工作。
4 結語
旋轉導向技術可以用于超長大位移延伸井、異常復雜的三維定向水平井等復雜井的施工,良好的施工效果可以避免用其他定向工具而導致的鉆速慢的問題。此外,由于鉆具一直是在旋轉,井眼的清潔效果得到大幅改善,鉆壓的傳遞也因摩阻的降低而變得容易,其優良的定向鉆井功能也降低了起下鉆次數,提高了施工效益。
[1]王鵬,唐雪平,洪迪峰.旋轉導向鉆井工具3D參數化虛擬樣機設計[J].石油礦場機械,2013,42(6):27-30.
[2]李俊,倪學莉,張曉東.動態指向式旋轉導向鉆井工具設計探討[J].石油礦場機械,2009,38(2):63-66.
[3]孫銘新.旋轉導向鉆井技術[M].東營:中國石油大學出版社,2009.
[4]毛季.鉆井導向液壓系統及其主要元件的研究[D].武漢:武漢科技大學,2013.
[5]趙金海,唐代緒,朱全塔.國外典型的旋轉導向鉆井系統[J].國外油田工程,2002,18(11):33-36.
[6]雷靜,楊甘生,梁濤,等.國內外旋轉導向鉆井系統導向原理[J].探礦工程:巖土鉆掘工程,2012,39(9):53-58.
[7]Stuart S,Demos P,Eric G.Application of a point the bit rotary steerable system in directional drilling prototype well-bore profiles[C]//SPE/AAPG Western Regional Meeting.2000.
[8]Stuart S,Demos P.Field application of a fully rotating point-the-bit rotary steerable system[C]//SPE/IADC drilling conference,2001.
[9]Janwadkar S,Fortenberry D,Dawkins B,et al.Pioneering Advanced Directional Drilling Technologies Overcome Challenges Of S And J Type Wells In N.America[C]//SPE Annual Technical Conference and Exhibition,2006.
[10]Jaggi A,Gera S,Upadhyay S,et al.Application Of Novel Technology Improves Drilling Performance In Multi-Lateral Field Development Offshore West India-Reducing Risk And Increasing Production[C]//SPE/IADC Drilling Conference,2007.
Study of Development and Application of Geo-Pilot Rotary Steering Drilling System
FU Tian-ming
(Southwest Drilling Company,Sinopec Zhongyuan Oilfield Service Corporation,Chengdu 610021,China)
The rotary steering drilling system is the key technique in rotary steering drilling,and is also the representativeness and advanced drilling tech at present.Its development tendency is reviewed;its system structure and working principle are analyzed.The summary of its feature and advance are given for on-site reference.
rotary steering drilling system;guiding principle;system structure;decentralizing device
TE921.2
B
1001-3482(2014)05-0077-04
2013-11-18
付天明(1970-),男,河南鄲城人,工程師,主要從事石油鉆井管理工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
