機(jī)動目標(biāo)ISAR自聚焦新方法
2014-06-09 06:10:06黃大榮邢孟道
西安電子科技大學(xué)學(xué)報 2014年3期
黃大榮,張 磊,邢孟道,保 錚
(西安電子科技大學(xué) 雷 達(dá)信號處理國家重點實驗室,陜西 西 安 710071)
逆合成孔徑雷達(dá)(ISAR)成像技術(shù)通常通過平動補(bǔ)償將運(yùn)動目標(biāo)轉(zhuǎn)換為轉(zhuǎn)臺目標(biāo)[1].平動補(bǔ)償包括包絡(luò)對齊和自聚焦.由于成像所需轉(zhuǎn)角一般較小,包絡(luò)的位移一般小于1個距離分辨單元,因此包絡(luò)對齊比較容易.常用的包絡(luò)對齊方法如互相關(guān)法[2]和最小熵法[3]等,對于機(jī)動目標(biāo)仍然適用[4].相位誤差是相對于雷達(dá)波長的,當(dāng)波長為厘米級時,毫米級的散射點徑向走動都會產(chǎn)生明顯的相位變化.因此,自聚焦技術(shù)是ISAR成像處理的關(guān)鍵.在高分辨雷達(dá)成像中,研究穩(wěn)健高精度的自聚焦技術(shù)意義重大[5-9].
對于平穩(wěn)飛行的目標(biāo),已有很多自聚焦方法:加權(quán)相位估計自聚焦方法[10]對于相位誤差的階數(shù)無要求,具有很強(qiáng)的魯棒性,但巨大的運(yùn)算量無法應(yīng)用于實際中.最大似然估計的特征向量分解法[11]估計的方差可以達(dá)到克拉美羅界,但是需要對高維度的協(xié)方差矩陣特征值分解,運(yùn)算量較大、實際應(yīng)用困難較大.相位梯度自聚焦方法[12](Phase Gradient Autofocus,PGA)運(yùn)算量適中且魯棒性較好,實際中應(yīng)用最為廣泛.但是,傳統(tǒng)的自聚焦方法都只考慮多普勒線性相位,并沒有考慮二次相位對相位誤差估計精度的影響.當(dāng)目標(biāo)進(jìn)行機(jī)動飛行時,回波的方位向信號產(chǎn)生隨時間變化的多普勒二次分量而被調(diào)制成線性調(diào)頻信號,信號相位中不僅含有多普勒線性相位,還包含由機(jī)動引入的二次相位,導(dǎo)致傳統(tǒng)的自聚焦方法存在估計精度下降的問題.
為了解決上述問題,筆者提出了一種機(jī)動目標(biāo)自聚焦新方法.通過一維方位像圓平移至圖像中心消除多普勒線性相位的影響[1];通過線性搜索獲得方位調(diào)頻率的最優(yōu)估計,實現(xiàn)多普勒二次相位項的補(bǔ)償;通過對所有樣本信號的相干積累,降低噪聲的影響,實現(xiàn)初始相位的估計;通過多次迭代處理來提高相位誤差估計精度.仿真和實測數(shù)據(jù)處理結(jié)果表明,筆者提出的方法具有比傳統(tǒng)方法更好的聚焦效果和噪聲容忍性.
1 信號模型
機(jī)動目標(biāo)成像的幾何模型如圖1所示.圖1中O點表示機(jī)動目標(biāo)等效到三維轉(zhuǎn)臺后的參考點.向量R表示雷達(dá)視線方向上的單位矢量,向量ω表示目標(biāo)的轉(zhuǎn)動向量.R和ω構(gòu)成成像平面OAC.將向量ω在OAC平面內(nèi)分解為沿OR方向的向量ωR和與OR垂直的向量ωe.由于ωR不改變目標(biāo)散射中心的徑向距離,ωe導(dǎo)致散射中心產(chǎn)生徑向移動,即ωe是有效的轉(zhuǎn)動向量.
假設(shè)雷達(dá)發(fā)射線性調(diào)頻脈沖信號形式為

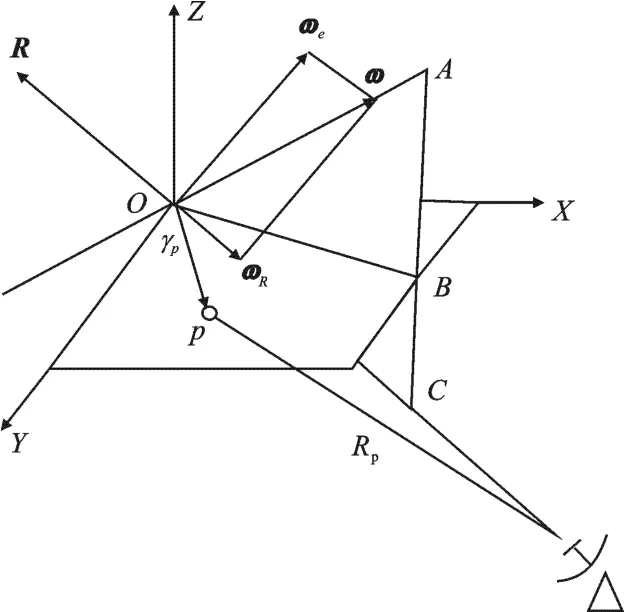
圖1 機(jī)動目標(biāo)ISAR成像幾何示意圖
其中,Tp表示發(fā)射信號脈沖寬度,fc表示信號載頻,γ表示發(fā)射信號的調(diào)頻率表示距離向快時間,tm表示方位向慢時間,t表示全時間,rect(·)表示發(fā)射信號的包絡(luò).回波信號經(jīng)解線頻調(diào)處理后,對快時間進(jìn)行傅里葉變換,忽略常數(shù)相位項并補(bǔ)償剩余視頻相位(RVP),得到信號差頻域的表達(dá)式為

其中,θp、fp和γp分別表示散射點p的起始相位、多普勒相位和方位向調(diào)頻率.這里假設(shè)ωe引起的徑向走動仍在一個分辨單元內(nèi),即認(rèn)為回波的包絡(luò)是非時變的.式(2)是理想情況下的信號模型.實際中機(jī)動目標(biāo)的運(yùn)動通常是未知的,常會引入嚴(yán)重的運(yùn)動誤差.假設(shè)散射點p位于第n個距離單元,經(jīng)過離散采樣后,信號重新表示為

其中,φ(m)表示相位誤差,σ(n;m)表示噪聲,t表示相鄰脈沖之間的時間間隔.此時,相位ψn為

其中,n=1,2,…,N,m=1,2,…,M,分別表示距離采樣總數(shù)和方位總脈沖數(shù);第n個距離單元的初始相位項、多普勒頻率項和二次相位項分別表示為

2 機(jī)動目標(biāo)自聚焦
2.1 特顯點樣本的選擇
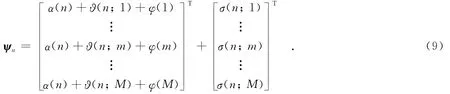
上述信號模型是建立在距離單元中僅含有1個孤立散射點的假設(shè)條件下,實際中理想的孤立散射點幾乎不存在,但特顯點總是存在的[1].假設(shè)信號中共有L個特顯點,按強(qiáng)度從大到小排序后,構(gòu)成樣本信號為

2.2 多普勒線性相位補(bǔ)償
多普勒線性相位通過將信號的一維方位像圓平移至圖像中心來消除.可通過對補(bǔ)償后的信號加窗濾波提高樣本的信雜噪比.補(bǔ)償多普勒線性相位后的信號相位可表示為
2.3 二次相位補(bǔ)償
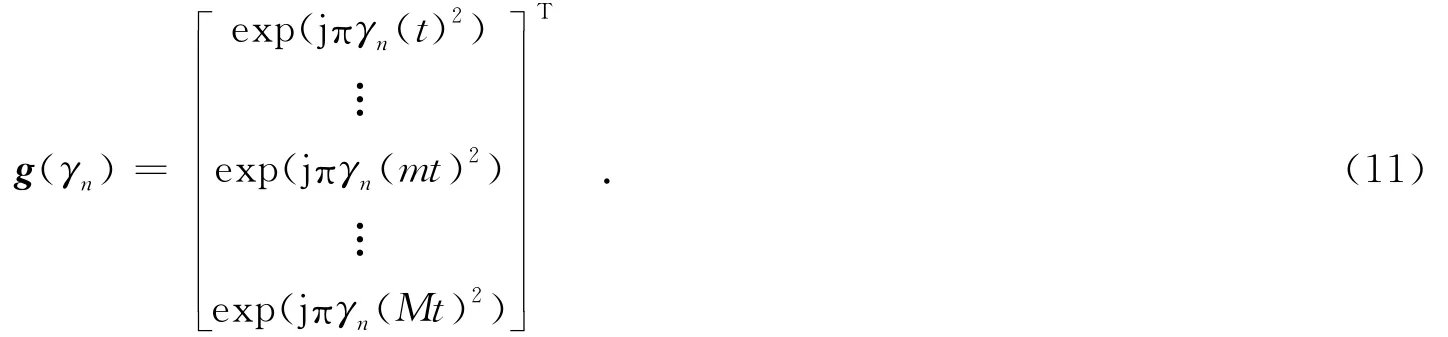
對二次相位項?(n;m)補(bǔ)償,實際是對方位向調(diào)頻率γn的估計,可以通過在[γmin,γmax]線性飽和搜索獲得.最大峰值處對應(yīng)γn的最優(yōu)估計為

其中,⊙表示矢量點乘,F(xiàn)FT[·]表示傅里葉變換,Peak{·}表示向量所有元素中的最大值,并有
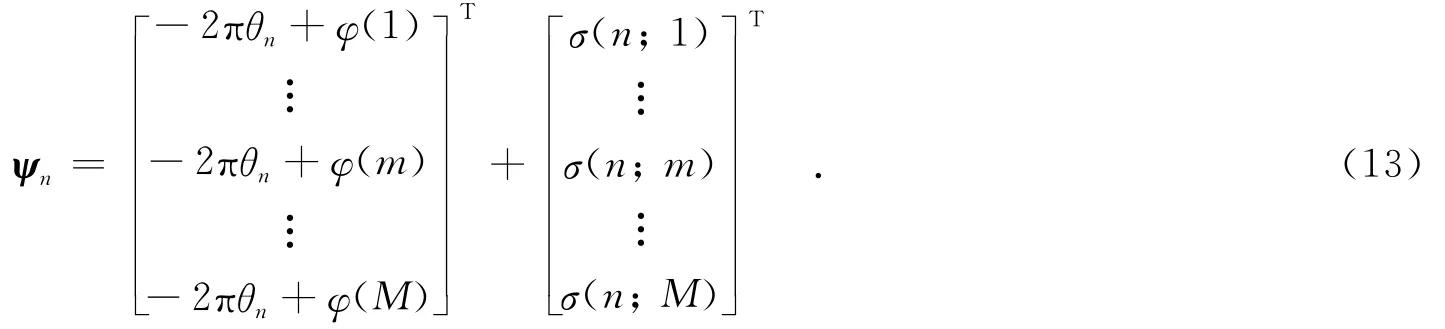
估計出γn后,與

相乘,信號相位變?yōu)?/p>
2.4 初始相位的補(bǔ)償
不同樣本信號的初始相位α(n)是不同的,初始相位具有隨機(jī)性.這里對初始相位的估計提出一種新的方法,通過對所有樣本信號的相干積累,避免了相位梯度估計,可獲得比PGA更高的相位誤差估計精度.首先求出樣本信號之間的相位差,即

式(15)表明,同一樣本信號的不同方位慢時刻,初始相位差Δθn相同,噪聲Δσ(n;m)是不同的.上述求和的過程本質(zhì)上是對初始相位差Δθn的相干積累.化簡式(14),可得


經(jīng)過兩次相干積累后,信號相位變?yōu)?/p>
2.5 相位誤差的補(bǔ)償
ψn除了包含相位誤差φ(m)外,還包含一個常數(shù)相位項θ1,它的存在對圖像的聚焦沒有影響.將距離壓縮后的信號統(tǒng)一與

相乘,補(bǔ)償相位誤差,就可以得到聚焦的圖像.
前面討論的多普勒相位、二次相位、隨機(jī)初相和相位誤差的估計均是假設(shè)信號中僅含有需要估計的相位項,不考慮其他相位的影響,實際中相位是同時存在的.文中采取迭代處理方法的步驟為:先采用文中的方法進(jìn)行一次粗補(bǔ)償,隨機(jī)初相和相位誤差對多普勒相位的影響已經(jīng)變得很小;再進(jìn)行多普勒相位的估計會提高精度,多普勒相位估計精度的提高,可以更準(zhǔn)確地估計二次相位和相位誤差;二次相位和相位誤差估計精度的提高,又可以更進(jìn)一步提高多普勒相位的補(bǔ)償,如此迭代至相位誤差估計精度達(dá)到指定要求為止.
3 運(yùn)算復(fù)雜度分析
通過統(tǒng)計各算法中的復(fù)數(shù)乘法運(yùn)算來進(jìn)行運(yùn)算復(fù)雜度分析.各步驟運(yùn)算量如表1所示.表1只給出了1次迭代需要的復(fù)乘運(yùn)算,總的運(yùn)算量為每次迭代所需的運(yùn)算量乘以迭代次數(shù).表1說明,文中方法與傳統(tǒng)方法的運(yùn)算復(fù)雜度的差異主要是在二次相位補(bǔ)償和初始相位補(bǔ)償.二次相位補(bǔ)償中,γk的范圍一般較小,特顯點樣本個數(shù)L一般也較小,因此二次相位補(bǔ)償?shù)倪\(yùn)算量是可以接受的.初始相位補(bǔ)償中,兩種方法的運(yùn)算復(fù)雜度在同一數(shù)量級,實際處理中的運(yùn)算效率接近.
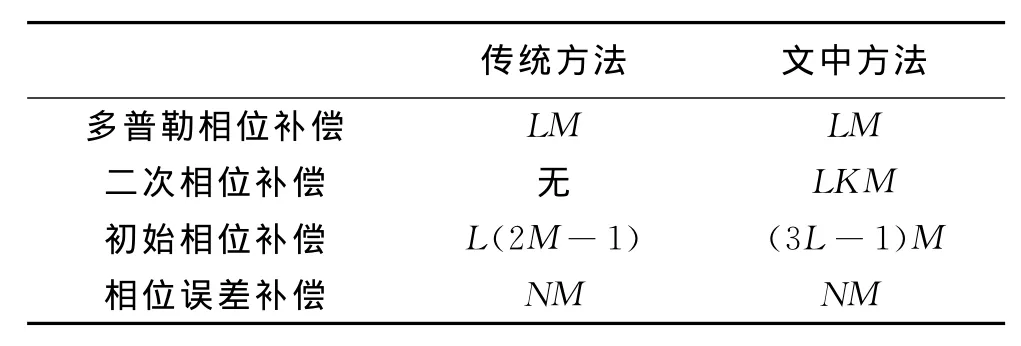
表1 算法運(yùn)算復(fù)雜度
4 算法流程
機(jī)動目標(biāo)ISAR自聚焦算法的處理流程如圖2所示,該算法的流程步驟如下:
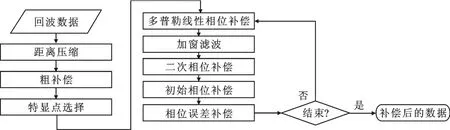
圖2 文中算法的流程圖
(1)距離壓縮.首先對原始回波數(shù)據(jù)進(jìn)行距離壓縮和包絡(luò)對齊.
(2)粗補(bǔ)償.利用第2節(jié)的方法,對距離壓縮后的數(shù)據(jù)進(jìn)行粗補(bǔ)償.
(3)特顯點單元選擇.按照信號強(qiáng)度從大到小排列,篩選出高信噪比的距離單元,構(gòu)成樣本信號.
(4)多普勒線性相位補(bǔ)償.將信號的一維方位像圓平移至圖像中心消除多普勒相位的影響.
(5)加窗濾波.預(yù)先設(shè)定逐步減小的窗長進(jìn)行加窗濾波以提高樣本的信雜噪比.
(6)二次相位補(bǔ)償.通過對調(diào)頻率的飽和搜索,利用式(12)補(bǔ)償二次相位項.
(7)初始相位補(bǔ)償.利用式(17)和式(18)估計,并補(bǔ)償隨機(jī)初始相位.
(8)相位誤差補(bǔ)償.利用式(20)估計,并補(bǔ)償相位誤差.
(9)重復(fù)迭代步驟(4)~(8),直到估計達(dá)到收斂精度.
5 數(shù)據(jù)處理及結(jié)果分析
5.1 仿真數(shù)據(jù)處理及結(jié)果分析
實驗數(shù)據(jù)來自美國Naval Research Lab提供的B727S仿真數(shù)據(jù).主要參數(shù)如下:中心頻率為9GHz,帶寬為150MHz,脈沖重復(fù)頻率為20kHz.仿真數(shù)據(jù)具有較高的信噪比,并且已經(jīng)過包絡(luò)對齊和運(yùn)動補(bǔ)償.圖3(a)所示為采用距離-多普勒成像方法得到的成像結(jié)果,由于目標(biāo)的機(jī)動特性,圖像中存在嚴(yán)重的散焦.
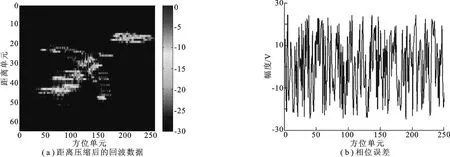
圖3 原始數(shù)據(jù)成像及添加的相位誤差
在仿真數(shù)據(jù)中,加入如圖3(b)所示的隨機(jī)相位誤差,變化范圍為[-8π,8π].采用相同的樣本和相同的迭代次數(shù),利用兩種自聚焦方法進(jìn)行處理,對所有距離單元進(jìn)行短時傅里葉變換(STFT),選取不同的成像時刻T1、T2和T3,得到圖4所示成像結(jié)果,圖中均為dB圖.兩種方法均能估計出隨機(jī)相位誤差,但傳統(tǒng)方法的一些距離單元有較嚴(yán)重的散焦現(xiàn)象,如圖4圓圈中的區(qū)域.這是因為傳統(tǒng)自聚焦方法沒有考慮目標(biāo)機(jī)動引入的二次相位對相位誤差的影響,使得相位誤差的估計精度不高.文中方法機(jī)動引入的二次相位補(bǔ)償后,再對相位誤差進(jìn)行估計,估計精度高于傳統(tǒng)方法,并通過多次迭代處理進(jìn)一步提高了相位誤差的估計精度,最終得到聚焦效果較理想的圖像.
在相同的隨機(jī)相位誤差條件下,添加隨機(jī)復(fù)高斯白噪聲得到不同信噪比條件下的數(shù)據(jù),采用兩種自聚焦方法得到圖5所示結(jié)果.在低信噪比條件下,傳統(tǒng)方法聚焦效果不理想,文中方法聚焦效果較好.隨著信噪比的提高,兩種方法對相位誤差的估計精度也提高.在相同的信噪比條件下,文中方法的聚焦精度均優(yōu)于傳統(tǒng)方法,說明文中方法對噪聲的容忍性較好.由于文中所提算法在對初始相位的估計過程中,通過對樣本信號的二次相干積累,有效降低了噪聲對隨機(jī)初相估計精度的影響,并通過多次迭代直到相位誤差收斂到所需精度要求為止,提高了算法的魯棒性.采用圖像熵和均方誤差來定量分析兩種方法的聚焦性能,如圖6所示.橫坐標(biāo)表示不同的信噪比,縱坐標(biāo)表示相位誤差的估計值與真實值的均方誤差.圖6中曲線為經(jīng)過200次蒙特卡洛實驗后的結(jié)果,其計算公式為

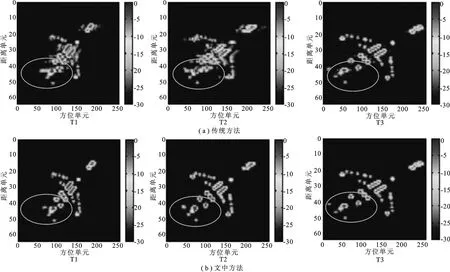
圖4 兩種方法的成像結(jié)果

圖5 不同時刻的成像結(jié)果
5.2 實測數(shù)據(jù)處理結(jié)果
本次實驗利用實測數(shù)據(jù)驗證算法的有效性.觀測目標(biāo)為雅克-42飛機(jī).信號帶寬為400MHz,載頻為C波段.分別采用兩種方法自聚焦處理后,得到圖7所示的時頻成像結(jié)果.在不同的成像中心時刻,目標(biāo)的姿態(tài)有明顯的變化.傳統(tǒng)方法在不同的成像中心時刻有不同程度的散焦(圖中圈中的部分),文中方法較好地提高了目標(biāo)的聚焦性能,圖像熵均小于傳統(tǒng)方法,聚焦效果較理想.
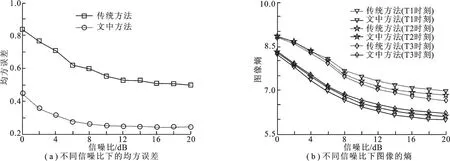
圖6 不同信噪比下算法的性能
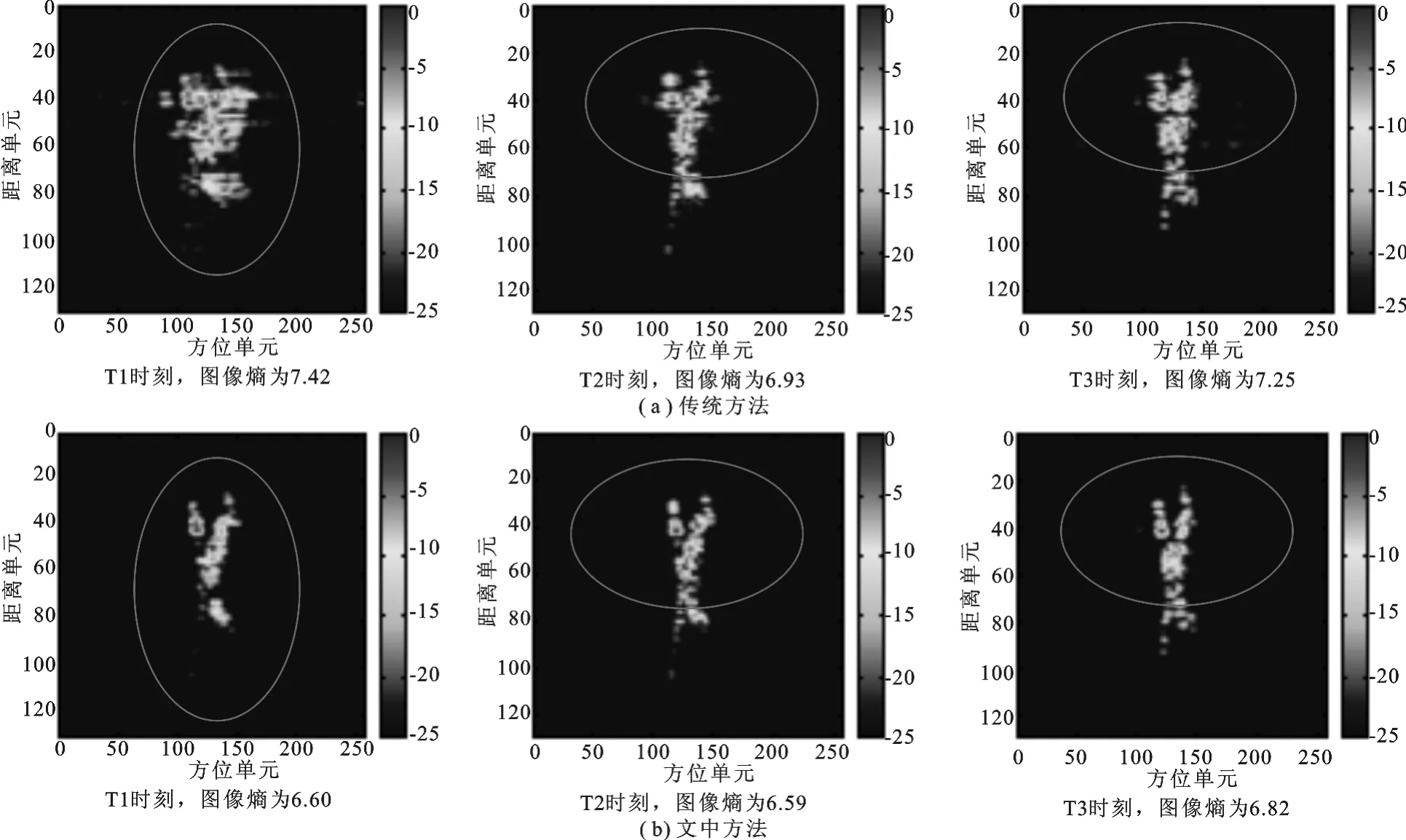
圖7 實測數(shù)據(jù)處理結(jié)果
6 結(jié)束語
機(jī)動目標(biāo)的合成孔徑陣列流形復(fù)雜,且難以精確已知.傳統(tǒng)的自聚焦方法不能有效地補(bǔ)償機(jī)動引入的二次調(diào)頻相位,聚焦效果不理想.當(dāng)信噪比低時,散焦現(xiàn)象更嚴(yán)重.筆者提出了一種機(jī)動目標(biāo)自聚焦新方法,該方法通過一維方位像圓平移至圖像中心,消除多普勒線性相位對相位誤差估計精度的影響;通過線性飽和搜索獲得方位調(diào)頻率的最優(yōu)估計,進(jìn)而實現(xiàn)二次相位項的補(bǔ)償;通過對所有樣本信號的相干積累,降低了噪聲的影響,實現(xiàn)了初始相位的精確估計;最后通過多次迭代處理,提高了相位誤差估計精度.仿真和實測數(shù)據(jù)處理結(jié)果表明,文中方法具有比傳統(tǒng)方法更好的聚焦效果和噪聲容忍性.
[1] 保錚,邢孟道,王彤.雷達(dá)成像技術(shù)[M].北京:電子工業(yè)出版社,2005.
[2] Chen C C,Andrews H C.Target-motion-induced Radar Imaging[J].IEEE Transactions on Aerospace and Electronic System,1980,16(1):2-14.
[3] Wang G Y,Bao Z.The Minimum Entropy Criterion of Range Alignment in ISAR Motion Compensation [C]//Proceedings of Radar Systems(IEE Conference Publication No 449).Stevenage:IEE,1997:236-239.
[4] Xing M D,Wu R B,Lan J Q,et al.Migration through Resolution Cell Composition in ISAR Imaging[J].IEEE Geoscience and Remote Sensing Letters,2004,1(2):141-144.
[5] Zhang L,Qiao Z,Xing M D,et al.Arobust Motion Compensation Approach for UAV SAR Imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(8):3202-3218.
[6] Falcone P,Colone F,Lombardo P,et al.WiFi-based Passive ISAR for High Resolution Cross-range Profiling of Moving Targets[C]//9th European Conference on Synthetic Aperture Radar.Piscataway:IEEE,2012:279-282.
[7] Jiang R,Zhu D,Shen M,et al.Synthetic Aperture Radar Autofocus Based on Projection Approximation Subspace Tracking[J].IET Radar,Sonar and Navigation,2012,6(6):465-471.
[8] Joachim H,Ender G.Autofocusing ISAR Images Via Sparse Representation[C]//9th European Conference on Synthetic Aperture Radar.Piscataway:IEEE,2012:203-206.
[9] Brisken S,Martorella M,Mathy T,et al.Multistatic ISAR Autofocussing Using Image Contrast Optimization [C]//IET International Conference on Radar Systems.Stevenage:IET,2012:1623.
[10] Ye W,Yeo T,Bao Z.Weighted Least-square Estimation of Phase Errors for SAR/ISAR Autofocus [J].IEEE Transactions on Geoscience and Remote Sensing,1999,37(5):2488-2494.
[11] Jakowatz C,Wahl D.Eigenvector Method for Maximum-likelihood Estimation of Phase Errors in Synthetic-apertureradar Imagery[J].Journal of the Optical Society of America,1993,10(12):2539-2546.
[12] Wahl D,Eichel P H,Ghiglia D C,et al.Phase Gradient Autofocus—a Robust Tool for High Resolution SAR Phase Correction[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(3):827-834.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
