CPLD在連采機保護系統中的應用
2014-06-09 12:33:05石博
機電產品開發與創新 2014年3期
石博
(中國煤炭科工集團 太原研究院,山西 太原 030006)
CPLD在連采機保護系統中的應用
石博
(中國煤炭科工集團 太原研究院,山西 太原 030006)
介紹了一種連采機控制與保護系統的設計方法,利用DSP外部擴展高性能CPLD模塊代替DSP控制A/D轉換,實現多個模擬信號采集、處理以及多種復雜邏輯關系,提高了控制系統集成度、處理速度和可靠性,從根本上解決了由單一DSP控制器控制導致的低可靠性和程序易飛等缺點。
連采機;電氣系統;交流采樣;CPLD
0 引言
隨著我國煤礦生產能力的提高和安全高效生產的需要,連采機在煤礦巷道施工中的應用越來越廣泛,已經成為煤礦井下不可缺少的大型采掘設備。電氣控制系統是連采機最重要的組成部分之一,其與液壓系統配合,可方便實現整機的各種生產作業,及對電動機、預警、照明、急停等輔助設備的控制與保護。我國連采機電氣控制技術經過幾十年的發展,連采機控制技術和可靠性不斷提高,除完成常規的控制、保護外,還具有遙控、故障診斷等功能。本文以連采機電氣控制系統為對象,在控制系統中設計了一種在DSP外部擴展高性能CPLD模塊用于數據采集和邏輯控制,將復雜的DSP片外邏輯組合和一些需要耗用大量等待時間的工作如A/D采樣環節交給CPLD模塊,DSP可以通過CPLD構成的數據采集和邏輯控制接口將多個外圍模擬和開關通道映射到其I/O地址空間進行訪問,大大增強了DSP訪問外設的能力,提高了整個控制系統數據采集的速度。以DSP和CPLD組合設計的控制系統不僅實現了對連采機邏輯控制、保護和組網通訊,而且預留了掘進斷面自動控制和掘進定向功能的硬件接口。現場應用結果表明:設計的控制系統不僅實現了多種控制功能,而且任務分工明確、實時性好、控制系統集成度強。
1 保護系統硬件設計
基于連采機生產工藝和自動控制的要求,以TI公司生產的32位微處理器TMS320F2812和CPLD為核心設計了一套連采機控制系統,不僅實現了連采機控制、保護功能,而且滿足了連采機生產的智能化、網絡化。
(1)TMS320F2812除具有數字信號處理能力外,還有強大的事件管理能力、嵌入式控制能力和多種標準串行通信外設,為連采機的控制提供了良好平臺。
(2)CPLD。利用基于EDA技術的CPLD時序和編程功能,將CPLD和DSP有效結合,實現了CPLD在微機控制系統中對器件的片選、讀寫和邏輯控制功能。
(3)微機控制單元。微機控制單元是控制系統的核心部分,承擔著數據采集、計算、邏輯判斷、定時、存儲等工作。主要包括:中央處理單元(CPU)、電源時鐘、復位電路、外部接口電路、存儲器及總線等。
(4)串行通信。串行通信包括兩個SCI口和一個SPI口,采用MAXIM公司生產的MAX485收發器,完成RS-485標準接口通信,以Modbus協議與操作箱和其它設備進行數據通信。
(5)CAN總線通信。TMS320F2812內部集成eCAN模塊,兼容CAN2.0B協議,不需要外加CAN控制器就能實現CAN總線底層協議。控制器eCAN端口連接CAN總線驅動器SN65HVD230實現CAN接口,并很方便接入到CAN總線系統中,與顯示箱、遙控系統、電磁閥控制箱組成CAN總線系統。
(6)PWM信號輸入給IRF540,增大PWM的驅動能力,以給連采機液壓系統中比例電磁閥提供足夠的電流。
(7)開關量輸入、輸出。開關量輸入、輸出單元連接控制系統和外圍設備,接受來自外部設備的開關量輸入和向外部設備發送開關量信號,并采用光電隔離和繼電器對信號進行隔離和電平轉換。
(8)標準模擬量信號。 標準模擬量信號為2~10V或者4~20mA,是各種傳感器經電氣控制箱內的本安隔離柵轉換后的信號,輸入到多路轉換開關后依次進行A/D轉換。
(9)周期性交流電量。周期性交流電量采集是直接對交流電量進行離散采樣,并經A/D轉換成微機可處理的數字量,通過算法計算出各個回路的電壓、電流、功率因數。
2 CPLD在保護系統中的應用
周期性交流電量和各種標準的直流模擬量信號都要通過A/D轉換,以完成連采機的自動控制和保護功能。DSP雖然在算法處理上功能強大,但其控制功能比較薄弱,若采用傳統的DSP控制A/D轉換,盡管編程簡單,但控制周期長,速度慢。利用CPLD編程的靈活性實現數據采樣接口,使得DSP可以通過這個接口將多個模擬通道映射到其I/O設備空間進行訪問。其次,通過對CPLD的編程,在一個芯片上實現控制系統所需的各種邏輯功能,以代替傳統的多個標準邏輯器件。通過CPLD在控制系統中的應用,增強了DSP訪問外設的能力,簡化了整個硬件電路的設計,提高了整個系統數據采集的速率,同時為外圍設備的擴展提供了可能。
2.1 CPLD特點
CPLD是20世紀80年代后期迅速發展的新一代可編程邏輯器件,用戶只要對它編程就可實現所需的電路功能。隨著可編程邏輯器件的發展,規模越來越大,功能越來越強,價格越來越便宜,相配套的開發軟件越來越完善[1]。使用CPLD器件主要有以下特點:①編程方式簡單先進。采用ISP編程技術,通過一根編程電纜和PC機就可完成編程過程;②速度快。CPLD器件具有較高的運行速度,時鐘延遲可達納秒級;③可靠性高。通過編程在芯片內部實現各種功能,但物理機制是硬件電路,因此,可有效防止控制程序的死機[2];④保密性強。CPLD器件一般都有一個可編程的保密位,通過一個可編程的保密位控制是否允許讀出器件內的數據。在連采機控制系統中使用CPLD器件,不僅增加系統設計的靈活性、提高系統的可靠性,而且縮小系統體積、降低系統成本。
2.2 基于CPLD數據采集
將多個A/D轉換單元通過CPLD映射到DSP的I/O地址空間,利用CPLD實現A/D轉換初始化和讀寫操作,使得DSP可以透過CPLD這個 “黑匣子”快速、準確地獲取數據。連采機控制系統要處理的25路模擬量信號分為周期性交流電量信號和標準電壓信號,將CPLD和DSP技術相結合,利用CPLD的時序控制25路A/D轉換啟動和停止,達到動態地選擇采樣通道的目的。
根據連采機電機保護要求和交流電量信號特點,本文利用CPLD高精度、高速度的優點設計成有限狀態機,通過CPLD程序實現整個采樣過程,以最大限度的減小DSP的工作量,采樣硬件框圖如圖1所示。
圖中,信號變換是對電壓、電流互感器輸出的電量信號經高精密電量互感器,并由放大電路形成可調電壓信號。雙四選一多路開關保證電壓和電流采樣同步進行,消除由電壓和電流非同步采樣帶來的角度差,從而提高控制系統各回路功率因數的精度[3]。低通濾波器降低信號輸入頻率,使其最高頻率不超過采樣頻率1/2。采樣保持器保證在A/D轉換期間,輸入的模擬信號保持不變。多路轉換開關是使多個模擬量信號共用一個A/D轉換模塊。
DSP外部中斷 0啟動 CPLD,在 CPLD程序中由CPLD的可編程性實現整個采樣控制。CPLD判斷到A/D轉換結束,就在DSP外部中斷1引腳上置高電平,啟動DSP外部中斷1,通過外部中斷1讀取A/D轉換結果。
轉換開關的選通由CPLD完成,采樣保持器與A/D之間通過多路轉換開關控制轉換順序,A/D轉換器的控制由CPLD實現的狀態機完成,即將A/D轉換過程分為ST0、ST1、ST2、ST3四個狀態,如圖2所示。
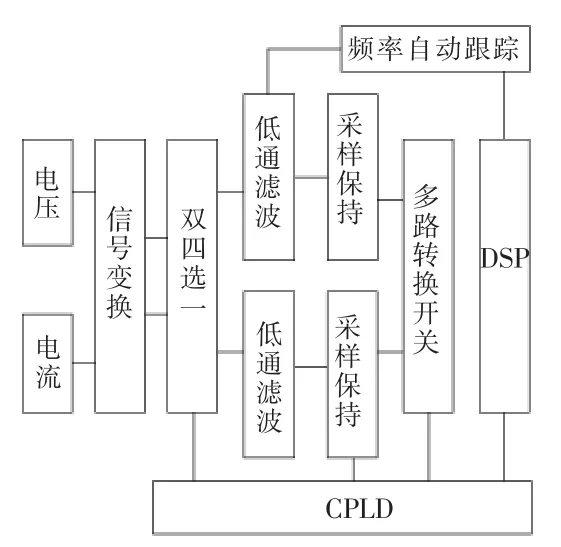
圖1 采樣硬件框圖
圖中,ST0為A/D轉換初始化,ST1為選通A/D轉換,ST2為 A/D轉換完成,ST3為讀轉換數據。此外,在連采機控制系統中,控制器還要處理多個0-10V直流電壓信號,此信號輸入到多路轉換開關,由CPLD的狀態機實現數據的循環采集和轉換。
數據采集中的CPLD采用了ALTERA公司MAX7000系列中的MAX7128E,其內部集成5000個門,128個宏單元,104個I/O引腳,由I/O輸入、輸出模塊和LAB邏輯陣列模塊組成,這些模塊由可編程互連矩陣相互連接。
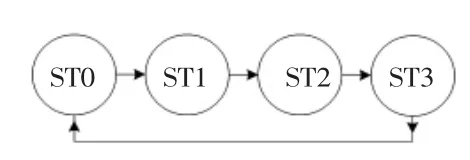
圖2 CPLD狀態機
2.3 基于CPLD邏輯控制
采用一片 CPLD代替若干傳統的標準邏輯器件74HC04、74HC32、74HC138等,以實現控制系統的各種邏輯功能,CPLD內部的邏輯電路如圖3所示。
圖3 實現的邏輯電路使用了Altera公司生產的型號為EPM7128SLC84-15的CPLD芯片,該芯片內部集成了 2500個基本邏輯門,有 84個引腳,其中20個引腳為電源或編程引腳,其余的 64個引腳為可編程,當增加新的邏輯功能時,不需要對硬件電路改動,就可通過CPLD的片內程序實現。
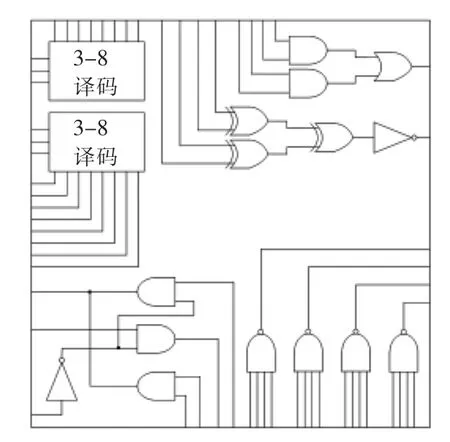
圖3 CPLD實現的邏輯電路
2.4 CPLD程序設計
編寫CPLD程序前,按照DSP地址分配原則對整個控制系統進行合理地址分配,以免在CPLD程序編寫過程中造成地址混疊。
整個設計首先根據控制系統的需要,確定要實現的邏輯功能、A/D轉換工作時序以及具體輸入輸出關系,對器件內部邏輯和引腳功能進行設置,在配套軟件MAX PLUSⅡ環境下用VHDL語言進行編程與編譯,生成相應的目標文件,并將目標文件通過JTAG電纜下載到CPLD芯片中,實現符合設計要求的邏輯功能和采樣控制。MAXPLUSⅡ軟件對生成的邏輯電路進行相應的功能仿真,以及時地發現編程時存在的問題。
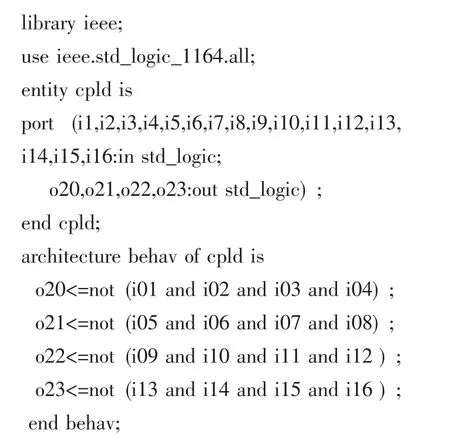
VHDL為CPLD的硬件描述語言,用于編寫CPLD功能程序。一個完整的VHDL語言程序包含實體、構造體、配置、包集合和庫5個部分。以邏輯功能為例,設計的CPLD程序中與非門的代碼如下所示:
3 結束語
連采機DSP控制系統中采用CPLD代替DSP控制A/ D器件的采樣工作和取代多個標準邏輯器件,減輕了數據采集裝置中DSP的工作量、簡化了控制板中PCB布線,增加了系統I/O的利用率和設計靈活性、縮短了開發周期,同時為外圍設備的擴展提供了有效途徑。在數據采集中采用CPLD,A/D采樣環節節省 DSP的等待時間12μs,對于25路模擬信號,每個采樣周期節省等待時間300μs。為適應連采機自動化系統對通信功能的要求,采用多種通信總線,如RS-485串行通信總線、CAN現場總線,并確保控制系統通信的實時性和可靠性。實踐表明:用DSP和CPLD設計的控制與保護系統不僅實現了連采機的自動控制,而且具有較強的實時性和抗干擾能力。
[1]張原.可編程邏輯器件設計及應用[M].北京:機械工業出版社,2003.
[2]趙曙光,郭萬有,楊頌華.可編程邏輯器件原理、開發與應用[M].西安:西安電子科技大學出版社,2000.
[3]呼守信.基于Intel 80C196KB控制的礦用高壓配電裝置測控系統的研究[D].太原理工大學,2005.
[4]丁恩杰,譚得健,等.微機監控系統抗干擾方法的研究及設計[J].煤礦自動化,1995,3.
本刊加入 “CNKI中國期刊全文數據庫”的聲明
為適應我國信息化建設,擴大本刊及作者知識信息交流渠道,本刊已被CNKI中國期刊全文數據庫收錄。如作者不同意文章被收錄,請來稿時向本刊聲明另作處理,同意收錄者不再另付稿費。
《機電產品開發與創新》雜志社
2014年5月
CPLD Application in Continuous Mining Machine in the Protection System
SHI Bo
(Taiyuan Research Institute of CCTEG,Taiyuan Shanxi 030006,China)
The way of the control and protection system for boring machine is introduced.External expansion of high-performance CPLD using DSP control module is instead of A/D conversion.The multiple analog signal acquisition,processing and a variety of complex logic are realized.The control system integration,processing speed and reliability are improved.A fundamental solution to the control by a single DSP controller is due to low reliability,and easy to fly and other shortcomings of the program.
continuous mining machine;electrical system;AC sampling;CPLD
TH-39
:Adoi:10.3969/j.issn.1002-6673.2014.03.054
1002-6673(2014)03-142-03
2014-03-27
石博(1979-),男,在中國煤炭科工集團太原研究院從事煤礦井下電氣產品的設計和開發工作。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25